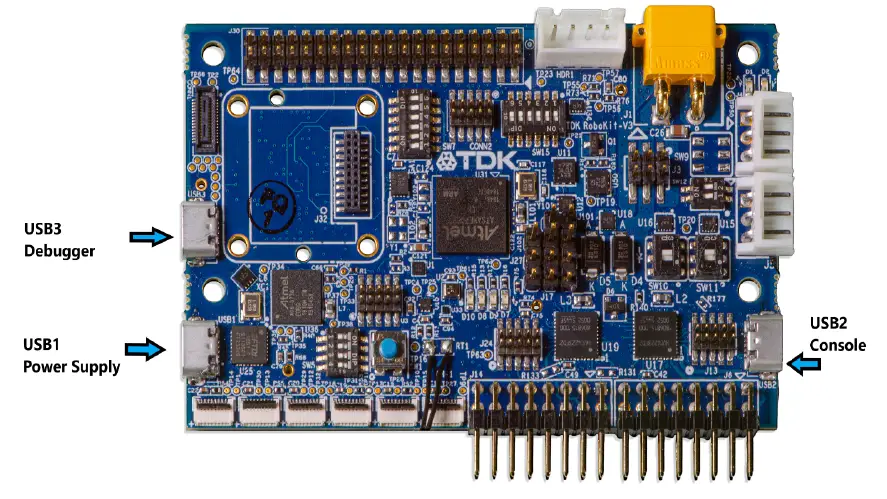
TDKROBOKIT1センサーが満載のオープンソースSmartRoboticsモジュール
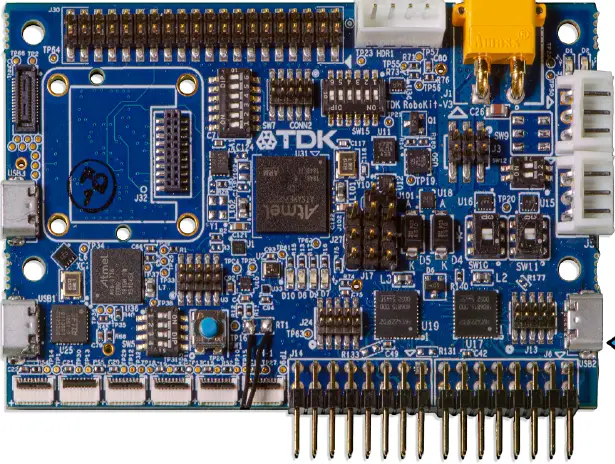
ROBOKIT1モジュール
このドキュメントはオーバーを提供しますview ROS2準拠のメッセージ構造を使用して特定のトピックに関するデータを公開するROS2ドライバーの一覧。 このモジュールには、圧力、IMU、温度、磁力計、オーディオ、マイク、および超音波センサーが含まれています。
ROS2ドライバー開発環境
- TDKRoboKit1ボード
- Raspberry Pi 4/Ubuntuマシン
oROS2Foxyに必要なすべてのパッケージをインストールします
oパッケージが期待どおりに機能することをテストします - センサーパッケージの構築
osrcディレクトリを使用して独自のワークスペースを作成します
oクローンを作成する内部パッケージ - GitHub –RoboKit1-ROS2-ドライバー
- Pythonで書かれたROS2ノード
- tdk_robokit_ctrl_sensors_nodeパッケージ内のノード
oローカルワークスペースでパッケージをビルドします - rm -rf install / log / build /
- Colcon build –symlink-install
ROS2ノードとログデータを開始します
- ros2 実行 tdk_robokit_ctlr_sensors_node icm42622_publisher
- ros2 実行 tdk_robokit_ctrl_sensors_node ak09918_publisher
- ros2 実行 tdk_robokit_ctrl_sensors_node icp10101_publisher
- ros2 実行 tdk_robokit_ctrl_sensors_node ch101_publisher
- ros2 実行 tdk_robokit_ctrl_sensors_node ads7052_publisher
- ros2 実行 tdk_robokit_ctrl_sensors_node ics43434_publisher
- ros2トピックリスト
- ros2トピックecho/tdk_robokit_icm4x6xx
- ros2トピックecho/tdk_robokit_ak09918
- ros2トピックecho/tdk_robokit_icp10101
- ros2トピックecho/tdk_robokit_ads7052
- ros2トピックecho/tdk_robokit_ch101
ロボットアプリケーションでデータを使用する方法
- RoboKit1の電源がオンになっていることを確認します。
- センサーがRoboKit1ボードに接続されているかどうかを確認します。
- RoboKit1ボードをROS2ホストマシンに接続します。
注記: センサーデータパブリッシャーノードは、パッケージですでに提供されています。
4.特定のトピック用に独自のサブスクライバーノードを作成します。
注記: サブスクライバーノードは、データを処理する別のノードである可能性があります。
5.パブリッシャーノードとサブスクライバーノードの両方を起動します。
6.加入者ノードのパブリッシャーからのデータを使用してロボットを制御します。
改訂履歴

InvenSenseまたはその関連会社(「TDKInvenSense」)が提供するこの情報は、正確で信頼できると考えられています。 ただし、TDK InvenSenseは、その使用、またはその使用に起因する可能性のある第三者の特許またはその他の権利の侵害について責任を負いません。 仕様は予告なく変更される場合があります。 TDK InvenSenseは、事前の通知なしに、設計やパフォーマンスを改善するために、回路やソフトウェアを含むこの製品に変更を加える権利を留保します。 TDK InvenSenseは、このドキュメントに含まれる情報および仕様に関して、明示または黙示を問わず、いかなる保証も行いません。 TDK InvenSenseは、本書に含まれる情報、または本書に記載されている製品やサービスの使用に起因するいかなる請求または損害についても責任を負いません。 これには、特許、著作権、マスク作業、および/またはその他の知的財産権の侵害に基づく請求または損害賠償が含まれますが、これらに限定されません。
InvenSenseが所有し、このドキュメントで説明されている特定の知的財産は、特許で保護されています。 InvenSenseの特許または特許権に基づいて、黙示的またはその他の方法でライセンスが付与されることはありません。 この出版物は、以前に提供されたすべての情報に取って代わります。 登録商標である商標は、それぞれの会社の所有物です。 TDK InvenSenseセンサーは、従来型または大量破壊兵器の開発、保管、製造、利用、その他の武器や生命を脅かす用途、および医療機器などの生命にかかわるその他の用途で使用または販売しないでください。輸送、航空宇宙および核兵器、海底機器、発電所機器、防災および防犯機器。 ©2022InvenSense。 全著作権所有。 InvenSense、MotionTracking、MotionProcessing、MotionProcessor、MotionFusion、MotionApps、DMP、AAR、およびInvenSenseロゴは、InvenSense、Inc.の商標です。TDKロゴは、TDCKorporationの商標です。 その他の会社名および製品名は、関連するそれぞれの会社の商標である可能性があります。
ドキュメント / リソース
 |
TDKROBOKIT1センサーが満載のオープンソースSmartRoboticsモジュール [pdf] ユーザーガイド ROBOKIT1、センサーパックのオープンソースSmartRoboticsモジュール、ROBOKIT1センサーパックのオープンソースSmartRoboticsモジュール、ROS2ドライバー、AN-000340 |



