तोशिबा TOSVERT VF-S11 VF नियंत्रण कार्य इन्वर्टर नियंत्रक

इस मैनुअल में तकनीकी जानकारी उत्पाद के प्रमुख कार्यों और अनुप्रयोगों की व्याख्या करने के लिए प्रदान की जाती है, लेकिन आपको तोशिबा श्नाइडर इन्वर्टर कॉर्पोरेशन या किसी तीसरे पक्ष की बौद्धिक संपदा या किसी अन्य संपत्ति का उपयोग करने का लाइसेंस देने के लिए नहीं। © तोशिबा श्नाइडर इन्वर्टर कॉर्पोरेशन 2006 सर्वाधिकार सुरक्षित।
नियंत्रण मोड का चयन
pt : वी / एफ नियंत्रण मोड चयन
समारोह
VF-S11 के साथ, नीचे दिखाए गए V/F नियंत्रणों का चयन किया जा सकता है।
- वी/एफ स्थिरांक! चर टोक़
- स्वचालित टॉर्क बूस्ट कंट्रोल *1
- वेक्टर नियंत्रण *1! ऊर्जा की बचत *1
- गतिशील ऊर्जा-बचत (प्रशंसकों और पंपों के लिए)
- पीएम मोटर नियंत्रण
- पैरामीटर सेटिंग मैक्रो टॉर्क बूस्ट: au2 पैरामीटर एक बार में इस पैरामीटर और ऑटो-ट्यूनिंग को स्वचालित रूप से सेट कर सकता है।
पैरामीटर सेटिंग

- डिफ़ॉल्ट सेटिंग मान "सॉफ़्टवेयर संस्करण" और "इन्वर्टर के प्रकार (WN या WP)" पर निर्भर करता है। [वी/एफ नियंत्रण मोड चयन को 3 (सेंसर रहित वेक्टर नियंत्रण) पर सेट करना]

चेतावनी
वी/एफ नियंत्रण मोड चयन पैरामीटर (पीटी) को 2 और 6 के बीच किसी भी संख्या पर सेट करते समय, कम से कम निम्नलिखित पैरामीटर सेट करना सुनिश्चित करें।
(मोटर रेटेड करंट): मोटर की नेमप्लेट देखें।
(मोटर का नो-लोड करंट): मोटर परीक्षण रिपोर्ट देखें। (मोटर की रेटेड घूर्णी गति): मोटर की नेमप्लेट देखें। आवश्यकतानुसार अन्य टॉर्क बूस्ट पैरामीटर भी सेट करें।
- लगातार टोक़ विशेषताएँ वी/एफ नियंत्रण मोड चयन को (वी/एफ स्थिर) पर सेट करना यह कन्वेयर और क्रेन जैसे उपकरणों के साथ लोड पर लागू होता है जिन्हें रेटेड गति पर कम गति पर समान टोक़ की आवश्यकता होती है।

टॉर्क को और बढ़ाने के लिए, मैन्युअल टॉर्क बूस्ट की सेटिंग वैल्यू बढ़ाएं। - प्रशंसकों और पंपों के लिए सेटिंग
वी/एफ नियंत्रण मोड चयन को (परिवर्तनीय टोक़) पर सेट करना यह प्रशंसकों, पंपों और ब्लोअर जैसी चीजों की लोड विशेषताओं के लिए उपयुक्त है जिसमें घूर्णन गति को लोड करने के संबंध में टोक़ इसके वर्ग के समानुपाती होता है।
- 3) वी/एफ कंट्रोल मोड सिलेक्शन पीटी टू 2 (ऑटोमैटिक टॉर्क बूस्ट कंट्रोल) का स्टार्टिंग टॉर्क बढ़ाना सभी स्पीड रेंज में लोड करंट का पता लगाता है और वॉल्यूम को अपने आप एडजस्ट करता हैtagइनवर्टर से ई आउटपुट (टॉर्क बूस्ट)। यह स्थिर रन के लिए स्थिर टॉर्क देता है।

टिप्पणी: यह नियंत्रण प्रणाली भार के आधार पर रनों को दोलन और अस्थिर कर सकती है। यदि ऐसा होना चाहिए, तो वी/एफ नियंत्रण मोड चयन पीटी को 0 (वी/एफ स्थिर) पर सेट करें और मैन्युअल रूप से टोक़ बढ़ाएं।
- मोटर स्थिरांक सेट किया जाना चाहिए यदि आप जिस मोटर का उपयोग कर रहे हैं वह 4पी तोशिबा मानक मोटर है और यदि इसकी क्षमता इन्वर्टर के समान है, तो मूल रूप से मोटर स्थिरांक सेट करने की कोई आवश्यकता नहीं है। किसी भी अन्य मामले में, पैरामीटर F415 से F417 को ठीक से सेट करना सुनिश्चित करें।
मोटर की नेमप्लेट पर बताए अनुसार (मोटर की रेटेड धारा) और (मोटर की रेटेड गति) को सही ढंग से सेट करना सुनिश्चित करें। (मोटर की नो-लोड धारा) की सेटिंग के लिए, मोटर परीक्षण रिपोर्ट देखें।
अन्य मोटर स्थिरांक स्थापित करने के लिए तीन प्रक्रियाएं हैं।- ऑटो टॉर्क बूस्ट और मोटर कॉन्स्टेंट (ऑटो-ट्यूनिंग) को एक साथ सेट किया जा सकता है। ऐसा करने के लिए, मूल पैरामीटर को .
- मोटर स्थिरांक स्वचालित रूप से सेट किया जा सकता है (ऑटो-ट्यूनिंग)। विस्तारित पैरामीटर को पर सेट करें।
- प्रत्येक मोटर स्थिरांक को व्यक्तिगत रूप से सेट किया जा सकता है।
- वेक्टर नियंत्रण - प्रारंभिक टोक़ बढ़ाना और उच्च परिशुद्धता संचालन प्राप्त करना। वी/एफ नियंत्रण मोड चयन पीटी से 3 की स्थापना तोशिबा मानक मोटर के साथ सेंसर-रहित वेक्टर नियंत्रण का उपयोग करने से कम गति की सीमाओं पर उच्चतम टॉर्क प्रदान किया जाएगा।
- बड़ा स्टार्टिंग टॉर्क प्रदान करता है।
- प्रभावी जब कम गति से सुचारू रूप से ऊपर जाने के लिए स्थिर संचालन की आवश्यकता होती है।
- मोटर फिसलन के कारण होने वाले भार में उतार-चढ़ाव को समाप्त करने में प्रभावी।
- मोटर स्थिरांक सेट किया जाना चाहिए
यदि आप जिस मोटर का उपयोग कर रहे हैं वह 4पी तोशिबा मानक मोटर है और यदि इसकी क्षमता इन्वर्टर के समान है, तो मूल रूप से मोटर स्थिरांक सेट करने की कोई आवश्यकता नहीं है। किसी भी अन्य मामले में, पैरामीटर को ठीक से सेट करना सुनिश्चित करें।
मोटर की नेमप्लेट पर निर्दिष्ट (मोटर की रेटेड धारा) और (मोटर की रेटेड गति) को सही ढंग से सेट करना सुनिश्चित करें। (मोटर का नो-लोड करंट) की सेटिंग के लिए, मोटर परीक्षण रिपोर्ट देखें।
अन्य मोटर स्थिरांक स्थापित करने के लिए तीन प्रक्रियाएं हैं।- सेंसर रहित वेक्टर नियंत्रण और मोटर स्थिरांक (ऑटो-ट्यूनिंग) को एक बार में सेट किया जा सकता है। मूल पैरामीटर सेट करें।
- मोटर स्थिरांक स्वचालित रूप से सेट किया जा सकता है (ऑटो-ट्यूनिंग)। विस्तारित पैरामीटर को पर सेट करें।
- प्रत्येक मोटर स्थिरांक को व्यक्तिगत रूप से सेट किया जा सकता है।
- वी/एफ नियंत्रण मोड चयन की ऊर्जा-बचत सेटिंग पीटी से 4 (ऊर्जा-बचत) ऊर्जा को सभी गति क्षेत्रों में लोड करंट का पता लगाकर और लोड को फिट करने वाले इष्टतम करंट को प्रवाहित करके बचाया जा सकता है।
- मोटर स्थिरांक सेट किया जाना चाहिए
यदि आप जिस मोटर का उपयोग कर रहे हैं वह 4पी तोशिबा मानक मोटर है और यदि इसकी क्षमता इन्वर्टर के समान है, तो मोटर स्थिरांक सेट करने की कोई आवश्यकता नहीं है। किसी भी अन्य मामले में, पैरामीटर को ठीक से सेट करना सुनिश्चित करें।
मोटर की नेमप्लेट पर निर्दिष्ट के अनुसार (मोटर की रेटेड धारा) और (मोटर की रेटेड गति) को सही ढंग से सेट करना सुनिश्चित करें। (मोटर का नो-लोड करंट) की सेटिंग के लिए, मोटर परीक्षण रिपोर्ट देखें।
अन्य मोटर स्थिरांक स्थापित करने के लिए तीन प्रक्रियाएं हैं। - स्वचालित ऊर्जा-बचत संचालन और एक मोटर स्थिरांक एक ही बार में सेट किया जा सकता है। मूल पैरामीटर सेट करें।
- मोटर स्थिरांक स्वचालित रूप से सेट किया जा सकता है (ऑटो-ट्यूनिंग)। विस्तारित पैरामीटर को पर सेट करें।
- प्रत्येक मोटर स्थिरांक को व्यक्तिगत रूप से सेट किया जा सकता है।
- मोटर स्थिरांक सेट किया जाना चाहिए
- आगे की ऊर्जा बचत प्राप्त करना V/F नियंत्रण मोड चयन PT को 5 पर सेट करना (गतिशील ऊर्जा-बचत) लोड करंट का ट्रैक रखने और लोड के लिए उपयुक्त करंट पास करके किसी भी गति सीमा में प्रदान की गई तुलना में अधिक पर्याप्त ऊर्जा बचत प्राप्त की जा सकती है। इन्वर्टर तेजी से लोड में उतार-चढ़ाव का जवाब नहीं दे सकता है, इसलिए इस सुविधा का उपयोग केवल उन लोड के लिए किया जाना चाहिए, जैसे पंखे और पंप, जो हिंसक लोड उतार-चढ़ाव से मुक्त हैं।
- मोटर स्थिरांक सेट किया जाना चाहिए
यदि आप जिस मोटर का उपयोग कर रहे हैं वह 4पी तोशिबा मानक मोटर है और यदि इसकी क्षमता इन्वर्टर के समान है, तो मोटर स्थिरांक सेट करने की कोई आवश्यकता नहीं है। किसी भी अन्य मामले में, पैरामीटर को ठीक से सेट करना सुनिश्चित करें।
मोटर की नेमप्लेट पर निर्दिष्ट के अनुसार (मोटर की रेटेड धारा) और (मोटर की रेटेड गति) को सही ढंग से सेट करना सुनिश्चित करें। (मोटर का नो-लोड करंट) की सेटिंग के लिए, मोटर परीक्षण रिपोर्ट देखें।
अन्य प्रकार की मोटरों के लिए, मोटर स्थिरांक सेट करने के दो तरीके हैं।- मोटर स्थिरांक स्वचालित रूप से सेट किया जा सकता है (ऑटो-ट्यूनिंग)। विस्तारित पैरामीटर को पर सेट करें।
- प्रत्येक मोटर स्थिरांक को व्यक्तिगत रूप से सेट किया जा सकता है
- एक स्थायी चुंबक मोटर का संचालन वी / एफ नियंत्रण मोड चयन (पीएम मोटर नियंत्रण) की सेटिंग स्थायी चुंबक मोटर (पीएम मोटर्स) जो हल्के, आकार में छोटे और अत्यधिक कुशल होते हैं, प्रेरण मोटर्स की तुलना में, सेंसर-रहित संचालन में संचालित किया जा सकता है तरीका।
ध्यान दें कि इस सुविधा का उपयोग केवल विशिष्ट मोटर्स के लिए किया जा सकता है। अधिक जानकारी के लिए अपने तोशिबा डीलर से संपर्क करें। - वेक्टर नियंत्रण पर सावधानियां
- वेक्टर नियंत्रण का प्रयोग करते समय, विस्तारित पैरामीटर को ठीक से सेट करना सुनिश्चित करें। मोटर की नेमप्लेट पर निर्दिष्ट (मोटर की रेटेड वर्तमान) और (मोटर की रेटेड गति) को सही ढंग से सेट करना सुनिश्चित करें। (मोटर का नो-लोड करंट) की सेटिंग के लिए, मोटर परीक्षण रिपोर्ट देखें।
- सेंसर रहित वेक्टर नियंत्रण आधार आवृत्ति के नीचे आवृत्ति क्षेत्रों में अपनी विशेषताओं को प्रभावी ढंग से लागू करता है। आधार आवृत्ति से ऊपर के क्षेत्रों में समान विशेषताएं प्राप्त नहीं की जाएंगी।
- वेक्टर नियंत्रण के दौरान आधार आवृत्ति को कहीं भी 40 से 120 हर्ट्ज पर सेट करें।
- एक सामान्य-उद्देश्य वाली गिलहरी-पिंजरे की मोटर का उपयोग ऐसी क्षमता के साथ करें जो इन्वर्टर की रेटेड क्षमता या एक रैंक नीचे के समान हो।
न्यूनतम लागू मोटर क्षमता 0.1kW है। - ऐसी मोटर का प्रयोग करें जिसमें 2-8 पी हो।
- मोटर को हमेशा एक ही ऑपरेशन (एक इन्वर्टर से एक मोटर) में संचालित करें। जब एक इन्वर्टर एक से अधिक मोटर के साथ संचालित होता है तो सेंसरलेस वेक्टर कंट्रोल का उपयोग नहीं किया जा सकता है।
- इन्वर्टर और मोटर के बीच तारों की अधिकतम लंबाई 30 मीटर है। यदि तार 30 मीटर से अधिक लंबे हैं, तो सेंसर रहित वेक्टर नियंत्रण के दौरान कम गति वाले टॉर्क को बेहतर बनाने के लिए जुड़े तारों के साथ मानक ऑटो-ट्यूनिंग सेट करें। हालांकि, वॉल्यूम के प्रभावtagई ड्रॉप रेटेड फ़्रीक्वेंसी के आसपास के क्षेत्र में मोटर-जनरेटेड टॉर्क को कुछ कम करता है।
- रिएक्टर या सर्ज वॉल्यूम को जोड़नाtagइन्वर्टर और मोटर के बीच ई सप्रेशन फिल्टर मोटर-जनरेटेड टॉर्क को कम कर सकता है। ऑटो-ट्यूनिंग सेट करने से भी यात्रा हो सकती है। सेंसर रहित वेक्टर नियंत्रण अनुपयोगी प्रदान करना।
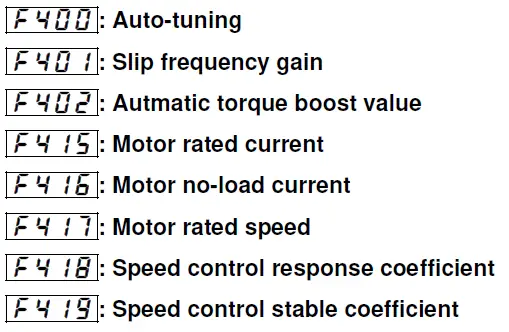
- निम्न तालिका वी/एफ नियंत्रण मोड चयन (पीटी) और मोटर स्थिरांक पैरामीटर के बीच संबंध को दर्शाती है। सामान्य परिस्थितियों में, 'ओओ' के साथ चिह्नित मापदंडों को सेट या समायोजित करना सुनिश्चित करें। विस्तृत सेटिंग्स करते समय, यदि आवश्यक हो, तो 'ओ' के साथ चिह्नित मापदंडों को भी समायोजित करें। 'X' से चिह्नित मापदंडों को समायोजित न करें, क्योंकि वे अमान्य हैं। (पैरामीटर f400 और बाद में समायोजित करने के तरीके के बारे में निर्देशों के लिए।)
वी / एफ नियंत्रण मोड चयन (पीटी) और मोटर निरंतर पैरामीटर के बीच संबंध


- OO: मापदंडों को सेट और समायोजित करना सुनिश्चित करें।
- हे: यदि आवश्यक हो तो पैरामीटर समायोजित करें।
मोटर स्थिरांक सेट करना (मानक)
वेक्टर नियंत्रण, स्वचालित टॉर्क बूस्ट और स्वचालित ऊर्जा बचत, मोटर निरंतर सेटिंग (मोटर ट्यूनिंग) का उपयोग करने के लिए आवश्यक है। मोटर स्थिरांक सेट करने के लिए निम्नलिखित तीन विधियाँ उपलब्ध हैं।
- एक ही समय में वी/एफ नियंत्रण मोड चयन और ऑटो-ट्यूनिंग सेट करने के लिए टोक़ बूस्ट सेटिंग मैक्रो फ़ंक्शन का उपयोग करना
- वी/एफ नियंत्रण मोड चयन और ऑटो-ट्यूनिंग को स्वतंत्र रूप से सेट करना
- वी/एफ नियंत्रण मोड चयन और मैनुअल ट्यूनिंग का संयोजन
- यह सुनिश्चित करने के लिए जांचें कि पैरामीटर vl और पैरामीटर vlv की सेटिंग बेस फ़्रीक्वेंसी (रेटेड रोटेशनल स्पीड) और बेस फ़्रीक्वेंसी वॉल्यूम से सहमत हैंtagई (रेटेड वॉल्यूमtagई) क्रमशः संचालित होने वाली मोटर की। यदि नहीं, तो पैरामीटर सही ढंग से सेट करें।
- एक ग्रेड या अधिक क्षमता से छोटी मोटर के संचालन को नियंत्रित करने के लिए इन्वर्टर का उपयोग करते समय, मोटर रेटेड वर्तमान सेटिंग पैरामीटर को ठीक से सेट करना सुनिश्चित करें।
- यदि मोटर क्षमता इन्वर्टर की लागू रेटेड क्षमता से दो से अधिक ग्रेड से भिन्न हो तो वेक्टर नियंत्रण ठीक से काम नहीं कर सकता है। यदि वर्तमान तरंग संचालन के दौरान दोलन करती है, तो गति नियंत्रण स्थिरता कारक बढ़ाएँ। यह दोलन को दबाने में प्रभावी है।
AU2 से 1 पर सेट करें (स्वचालित टॉर्क बूस्ट + ऑटो-ट्यूनिंग) AU2 से 2 . सेट करें
(वेक्टर नियंत्रण + ऑटो-ट्यूनिंग)। AU2 से 3 सेट करें (ऊर्जा-बचत + ऑटो-ट्यूनिंग)
यह विधि सेंसर रहित वेक्टर नियंत्रण या स्वचालित टॉर्क बूस्ट और ऑटो-ट्यूनिंग को स्वतंत्र रूप से सेट करती है। नियंत्रण मोड चयन पैरामीटर (पीटी) निर्दिष्ट करें और फिर ऑटो-ट्यूनिंग सेट करें। ऑटो-ट्यूनिंग पैरामीटर F400 को (ऑटो-ट्यूनिंग सक्षम) पर सेट करें
ऑपरेशन शुरू होने से पहले f400 से 2 पर सेट करें। ट्यूनिंग मोटर की शुरुआत में की जाती है।
ऑटो-ट्यूनिंग पर सावधानियां
- मोटर कनेक्ट होने और ऑपरेशन पूरी तरह से बंद होने के बाद ही ऑटो-ट्यूनिंग का संचालन करें।
यदि ऑपरेशन बंद होने के तुरंत बाद ऑटो-ट्यूनिंग की जाती है, तो अवशिष्ट वॉल्यूम की उपस्थितिtagई के परिणामस्वरूप असामान्य ट्यूनिंग हो सकती है। - वॉल्यूमtagई को ट्यूनिंग के दौरान मोटर पर लगाया जाता है, भले ही वह मुश्किल से घूमता हो। ट्यूनिंग के दौरान, ऑपरेशन पैनल पर प्रदर्शित होता है।
- ट्यूनिंग तब की जाती है जब f400 के 2 पर सेट होने के बाद पहली बार मोटर चालू होती है।
ट्यूनिंग आमतौर पर तीन सेकंड के भीतर पूरी हो जाती है। यदि इसे निरस्त कर दिया जाता है, तो मोटर के डिस्प्ले के साथ ट्रिप हो जाएगा और उस मोटर के लिए कोई स्थिरांक सेट नहीं किया जाएगा। - हाई-स्पीड मोटर्स, हाई-स्लिप मोटर्स या अन्य विशेष मोटर्स को ऑटो-ट्यून नहीं किया जा सकता है। इन मोटर्स के लिए, नीचे वर्णित चयन 3 का उपयोग करके मैन्युअल ट्यूनिंग करें।
- यांत्रिक ब्रेकिंग जैसे पर्याप्त सर्किट संरक्षण के साथ क्रेन और होइस्ट प्रदान करें। पर्याप्त सर्किट सुरक्षा के बिना, ट्यूनिंग के दौरान परिणामी अपर्याप्त मोटर टॉर्क मशीन के रुकने/गिरने का जोखिम पैदा कर सकता है।
- यदि ऑटो-ट्यूनिंग असंभव है या ऑटो-ट्यूनिंग त्रुटि प्रदर्शित होती है, तो चयन 3 के साथ मैन्युअल ट्यूनिंग करें।
- यदि आउटपुट फेज फेलियर (इको) के कारण ऑटो-ट्यूनिंग के दौरान इन्वर्टर ट्रिप हो जाता है, तो जांच लें कि इन्वर्टर सही से जुड़ा है या नहीं। आउटपुट चरण विफलता का पता लगाने मोड चयन पैरामीटर की सेटिंग की परवाह किए बिना, ऑटो-ट्यूनिंग के दौरान आउटपुट चरण विफलताओं की जांच की जाती है।

मोटर स्थिरांक 2 सेट करना (विवरण)
एफ480 : रोमांचक वर्तमान गुणांक
एफ485 : स्टाल रोकथाम नियंत्रण गुणांक
एफ492 : स्टाल रोकथाम नियंत्रण गुणांक 2
एफ494 : मोटर समायोजन गुणांक
एफ495 : मैक्सिमम वॉल्यूमtagई समायोजन गुणांक
एफ496 : तरंग स्विचिंग समायोजन गुणांक
*निम्नलिखित पैरामीटर आपको अधिक सूक्ष्मता से समायोजन करने में सक्षम बनाते हैं।

f480: कम गति सीमा में चुंबकीय क्षेत्र वृद्धि दर को ठीक से समायोजित करने के लिए प्रयुक्त होता है। कम गति की सीमा में टोक़ को बढ़ाने के लिए, एक बड़ा मान निर्दिष्ट करें। ध्यान दें कि इस पैरामीटर को तभी समायोजित किया जाना चाहिए जब पर्याप्त टोक़ प्राप्त नहीं किया जा सकता है, भले ही पैरामीटर की सेटिंग के बाद ऑटो-ट्यूनिंग किया गया हो। यह भी ध्यान दें कि इस पैरामीटर को समायोजित करने से लो-स्पीड रेंज में नो-लोड करंट में वृद्धि हो सकती है। यदि नो-लोड करंट रेटेड करंट से अधिक है, तो इस पैरामीटर को समायोजित न करें। f492 के साथ इस पैरामीटर का उपयोग उस क्षेत्र में विशेषताओं को समायोजित करता है जिसमें आवृत्ति आधार आवृत्ति से ऊपर होती है (क्षेत्र जहां क्षेत्र कमजोर है)। f485 के साथ इस पैरामीटर का उपयोग उस क्षेत्र में विशेषताओं को समायोजित करता है जिसमें आवृत्ति आधार आवृत्ति (वह क्षेत्र जहां क्षेत्र कमजोर है) से ऊपर है। * आधार आवृत्ति के ऊपर एक क्षेत्र (जिस क्षेत्र में चुंबकीय क्षेत्र कमजोर है) में समायोजन कैसे करें यदि एक भारी भार तत्काल (या क्षणिक रूप से) लागू किया जाता है, तो स्टाल की रोकथाम के साथ लोड करंट के वर्तमान सेट तक पहुंचने से पहले मोटर रुक सकती है। स्तर 1 पैरामीटर (f601)। कई मामलों में, f485 की सेटिंग को धीरे-धीरे कम करके इस तरह के स्टाल से बचा जा सकता है। आपूर्ति वॉल्यूम में गिरावटtagई मोटर के लोड करंट या कंपन में उतार-चढ़ाव का कारण हो सकता है। कुछ मामलों में, f492 की सेटिंग को 80 और 90 के बीच बदलकर ऐसी घटनाओं को समाप्त किया जा सकता है। हालांकि, इससे लोड करंट में वृद्धि हो सकती है, इसलिए इलेक्ट्रॉनिक थर्मल सुरक्षात्मक स्तर 1 पैरामीटर की सेटिंग को समायोजित करना भी आवश्यक है ( thr) मोटर क्षमता के अनुसार ठीक से। सामान्य परिस्थितियों में इस पैरामीटर को समायोजित करने की कोई आवश्यकता नहीं है। (सेटिंग में बदलाव न करें, जब तक कि तोशिबा तकनीकी कर्मचारियों द्वारा अन्यथा निर्देश न दिया जाए) उच्च आउटपुट वॉल्यूम के रूप में सुरक्षित करने के लिए f495 के लिए एक बड़ा मान निर्दिष्ट करेंtagई एक क्षेत्र में जितना संभव हो (वह क्षेत्र जहां चुंबकीय क्षेत्र कमजोर है) आधार आवृत्ति से ऊपर। F495 को बड़े मान पर सेट करने से मोटर कंपन कर सकती है या गियर चीख़ सकते हैं। यदि ऐसी कोई घटना होती है, तो इस पैरामीटर को समायोजित न करें। f496 के लिए एक बड़ा मान निर्दिष्ट करें यदि एक तरंग से दूसरे में स्विच करने से मध्य-गति सीमा (प्रारंभ आवृत्ति और आधार आवृत्ति के बीच का क्षेत्र) में कंपन और शोर में काफी वृद्धि होती है। यदि बड़ा मान निर्दिष्ट करके कोई सुधार नहीं किया जा सकता है, तो इस पैरामीटर को समायोजित न करें।
दस्तावेज़ / संसाधन
 |
तोशिबा TOSVERT VF-S11 VF नियंत्रण कार्य इन्वर्टर नियंत्रक [पीडीएफ] निर्देश TOSVERT VF-S11 VF नियंत्रण कार्य इन्वर्टर नियंत्रक, TOSVERT VF-S11 VF नियंत्रण कार्य इन्वर्टर नियंत्रक |



