botnroll com PICO4DRIVE مجلس تطوير Pi Pico

معلومات المنتج
PICO4DRIVE عبارة عن مجموعة تجميع PCB مصممة للاستخدام مع Raspberry Pi Pico. يتيح لك توصيل المكونات المختلفة وربطها بسهولة مع Raspberry Pi Pico، مثل الرؤوس والكتل الطرفية وأزرار الضغط. تأتي المجموعة مع جميع المكونات الضرورية لتجميع PCB، بما في ذلك الرؤوس والكتل الطرفية وأزرار الضغط.
تعليمات استخدام المنتج
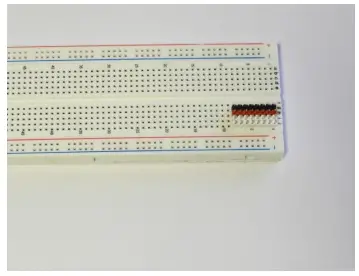
- ضع الرؤوس على اللوح كما هو موضح في الصورة. استخدم جسمًا صلبًا ذو سطح مستوٍ لدفع جميع المسامير من نفس الرأس إلى الأسفل في نفس الوقت. إذا تم دفع بعض الدبابيس فقط للأسفل عن طريق الخطأ، فقم بإزالة الرأس وأعد إدخال الدبابيس للتأكد من أنها جميعها في نفس المستوى.
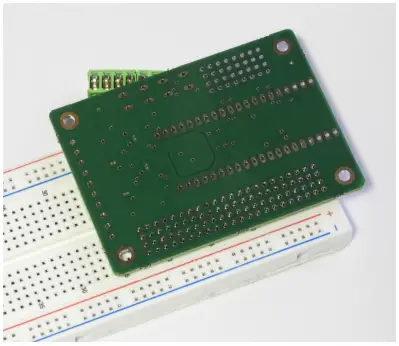
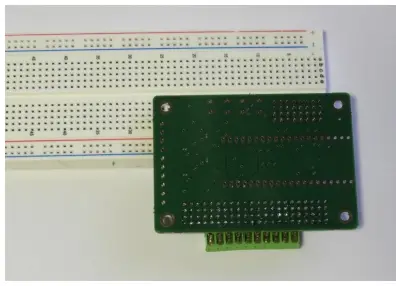
- ضع PCB رأسًا على عقب فوق الرأس، مع التأكد من أنه في الموضع الصحيح وأفقي تمامًا. استخدم كتلة طرفية كطبقة حماية للحفاظ على مستوى ثنائي الفينيل متعدد الكلور.
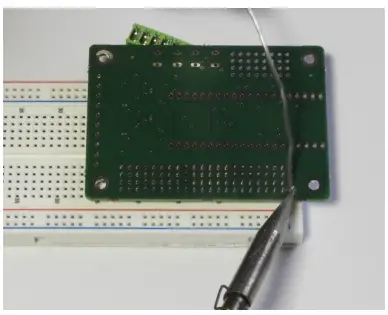
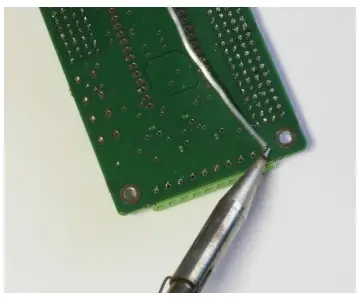
- جندى جميع دبابيس الرأس. ابدأ بلحام دبوس واحد أولاً وتحقق من المحاذاة قبل لحام الزوايا الأخرى وجميع المسامير.
- قم بإزالة PCB من لوحة التجارب عن طريق هزه بلطف من جانب إلى آخر للمساعدة في إخراجه.
- كرر العملية للرؤوس على الجانب الآخر. ضع الرؤوس كما هو موضح في الصورة.
- ضع PCB كما هو موضح، مع التأكد من أنه في وضع أفقي. تحقق من المحاذاة أثناء لحام دبابيس الزاوية الأولى.
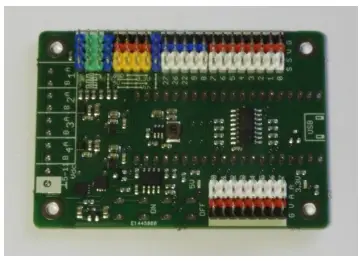
- بعد إزالته من اللوح، يجب أن يكون للوحة PCB مظهر مكتمل.
- أدخل الكتلة الطرفية من الأعلى، وتأكد من أنها تواجه الاتجاه الصحيح مع توجيه فتحات الأسلاك للخارج.
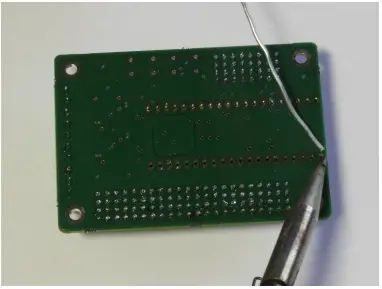
- اقلب PCB رأسًا على عقب ولحام جميع المسامير، مع التأكد من تثبيت الكتلة الطرفية بشكل صحيح على PCB.
- استخدم Raspberry Pi Pico لتثبيت رؤوس Pi Pico في مكانها أثناء اللحام.
- اقلب PCB رأسًا على عقب وقم بلحام دبابيس رأس Pico. ابدأ بلحام دبوس واحد أولاً وتحقق من المحاذاة قبل لحام جميع المسامير.
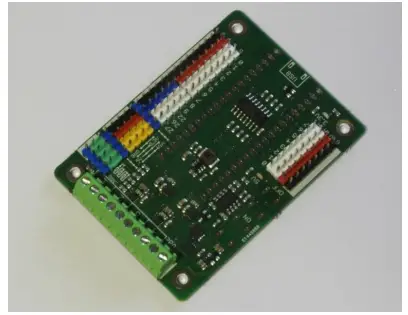
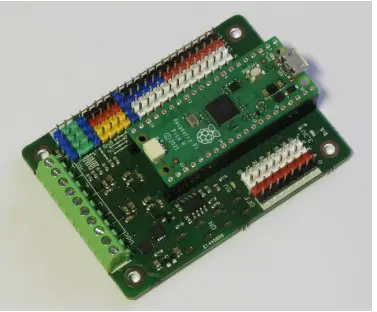
- بعد لحام دبابيس رأس Pico وإزالة Pi Pico، يجب أن يكون للوحة PCB مظهر مكتمل.
- أدخل أزرار الضغط كما هو موضح في الصورة. تحتوي دبابيس الزر على شكل يثبت الزر في مكانه حتى قبل اللحام. اقلب PCB رأسًا على عقب وقم بلحام دبابيس الزر. أخيرًا، أعد تشغيل PCB احتياطيًا. تهانينا، PCB الخاص بك جاهز!
التوصيات العامة
- سوف يؤدي تدفق اللحام داخل سلك اللحام إلى إطلاق أبخرة أثناء عملية اللحام. نوصي بالقيام بأعمال التجميع في منطقة جيدة التهوية
عند لحام عدة دبابيس للرأس، قم بلحام دبوس زاوية واحد فقط أولاً وتحقق من محاذاة اللوحة. إذا كانت المحاذاة خاطئة، فلا يزال من السهل إعادة لحام الدبوس في الموضع الصحيح. ثم قم بلحام الزاوية المقابلة وأعد التحقق. ثم قم بلحام الزوايا الأخرى للحصول على الثبات قبل لحام جميع المسامير الأخرى
استخدام التعليمات
- ضع الرؤوس على اللوح كما هو موضح في الصورة. قد تحتاج إلى استخدام جسم صلب ذو سطح مستوٍ لدفع جميع المسامير من نفس الرأس إلى الأسفل في نفس الوقت. إذا تم دفع بعض الدبابيس للأسفل عن طريق الخطأ،
قم بإزالة الرأس وأعد إدخال المسامير للتأكد من أنها كلها على نفس المستوى.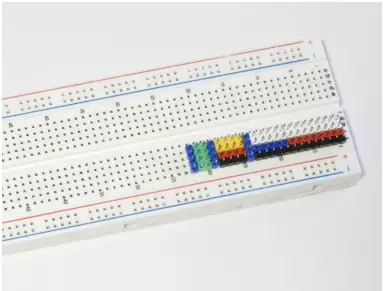
- ضع PCB رأسًا على عقب فوق الرأس. تأكد من أنه في الموضع الصحيح وأنه في وضع أفقي تمامًا. في الصورة، يتم استخدام الكتلة الطرفية كطبقة حماية للحفاظ على مستوى PCB.
- جندى جميع دبابيس الرأس. قم بلحام واحدة فقط أولاً وتحقق من المحاذاة قبل لحام الزوايا الأخرى وجميع المسامير.
- قم بإزالة ثنائي الفينيل متعدد الكلور من اللوح. قد تحتاج إلى هز PCB برفق من جانب إلى آخر للمساعدة في إخراجه.
أنت الآن في منتصف الطريق تقريبًا.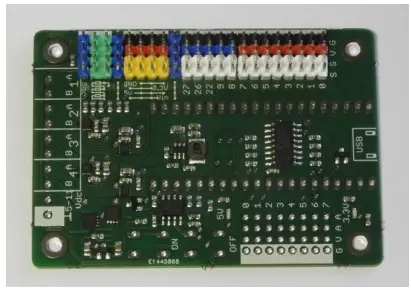
- كرر العملية للرؤوس على الجانب الآخر. ضع الرؤوس كما هو موضح في الصورة.
- ضع ثنائي الفينيل متعدد الكلور كما هو موضح. مرة أخرى، تأكد من أن PCB أفقي واستمر في التحقق أثناء لحام دبابيس الزاوية الأولى.
- بعد إزالته من اللوح، يجب أن يبدو PCB بهذا الشكل.
- أدخل الكتلة الطرفية من الأعلى. تأكد من أنه يواجه الاتجاه الصحيح، مع توجيه فتحات الأسلاك للخارج
- اقلب PCB رأسًا على عقب وقم بلحام جميع المسامير. تأكد من وضع الكتلة الطرفية بشكل صحيح على PCB.
- استخدم Raspberry Pi Pico لتثبيت رؤوس Pi Pico في مكانها أثناء اللحام
- اقلب PCB رأسًا على عقب وقم بلحام دبابيس رأس Pico. مرة أخرى، قم بلحام دبوس واحد فقط أولاً وتحقق من المحاذاة قبل لحام جميع المسامير
- بعد لحام دبابيس رأس Pico وإزالة Pi Pico، يجب أن يبدو PCB بهذا الشكل

- أدخل أزرار الضغط كما هو موضح في الصورة. تحتوي دبابيس الزر على شكل يثبت الزر في مكانه حتى قبل اللحام. اقلب PCB رأسًا على عقب وقم بلحام دبابيس الزر. أعد تشغيل PCB احتياطيًا. تهانينا، PCB الخاص بك جاهز!

المستندات / الموارد
 |
botnroll com PICO4DRIVE مجلس تطوير Pi Pico [بي دي اف] دليل التعليمات PICO4DRIVE، مجلس تطوير PICO4DRIVE لـ Pi Pico، مجلس تطوير Pi Pico، مجلس تطوير Pi Pico، Pi Pico، Pico |