![]()
Pickerbot Pro 用户手册
请注意,所显示的图像仅供参考*。
作者:Wayne Liu、Reilly Smithers
3 年 2024 月 XNUMX 日
概括
Pickerbot Pro 是一个多功能研发机器人平台,可用于各种应用,包括农业、采矿和建筑等户外应用,以及机器人辅助物流、搜索和救援演示和地图绘制等室内应用。
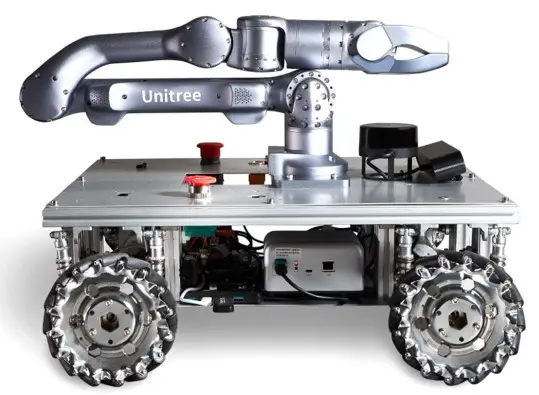
Pickerbot Pro 配备 Unitree Z1 Pro 机械臂,伸展距离为 740 毫米,有效载荷能力为 3 公斤,具有 6 个自由度,提供令人印象深刻的铰接式关节,以及力反馈和碰撞检测功能。
它由 NVIDIA Jetson Orin 系列单板计算机(Nano 或 NX 版本)提供支持,使用 CUDA 提供强大的图形或并行计算功能,从而提供更先进的计算机视觉和机器学习任务,同时保留紧凑轻巧的设计。
Pickerbot Pro 配备 Orbbec 3D Astra 摄像头,提供深度感应、物体跟踪和手势识别功能。
Pickerbot Pro 采用坚固而轻巧的底盘,配备 4WD 系统和独立悬架,可增强在崎岖地形上的导航能力。大型麦克纳姆轮可提供精确的全向移动,同时具有高抓地力。
关键部件和硬件
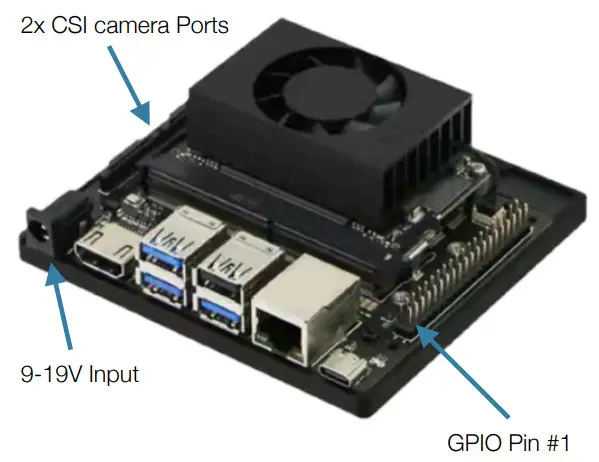
1.1 ROS 2 控制器:NVIDIA Jetson Orin(NX 8GB 或 Nano 4GB)
板载 Jetson Orin 单板计算机为 Pickerbot Pro 提供强大的嵌入式计算功能。它配备 128GB SSD、英特尔无线网卡和板载天线、HDMI、四个 USB 端口(其中 3 个为 USB 3.0)、以太网和 USB-C。直流管形插孔为电路板供电,电压为 9-19V。板载 GPIO 引脚使用与流行的 Raspberry Pi 单板计算机相同的基本布局,从外排的引脚 #1 开始,靠近以太网端口。同样,两个 CSI 摄像头连接器可与 Raspberry Pi 品牌和类似的小型摄像头配合使用。
预装软件包括 ROS 2 Humble、Ubuntu 22.04 和 NVIDIA Jetpack,可充分发挥 Orin 平台的功能。
注意:为了保持与底盘控制器和其他机器人组件的兼容性,我们不建议使用不同的软件刷新 Jetson Orin。如需更多高级用例,请联系 Roboworks 支持。
1.2 传感系统:激光雷达和深度摄像头
Pickerbot Pro 配备雷神 M10 LSLiDAR。最大探测范围为 30 米,旋转扫描频率为 12Hz,信噪比高,无需额外滤波。无缝集成,提供出色的地图绘制和导航功能。
此外,Pickerbot Pro 还配备了 Orbbec Astra 深度摄像头,这是一款 RGB 深度摄像头。这款摄像头针对多种用途进行了优化,包括手势控制、骨骼跟踪、3D 扫描、物体检测和使用 ROS 2 进行点云开发。
| 深度分辨率 | RGB 分辨率 | RGB 感应角度 | 深度 FPS | RGB 帧率 | 深度帧率 | 深度范围 |
| 640×480 | 640×480 | 63.1×49.4° | 58×45.5° | 30帧/秒 | 30帧/秒 | 0.6~4米 |
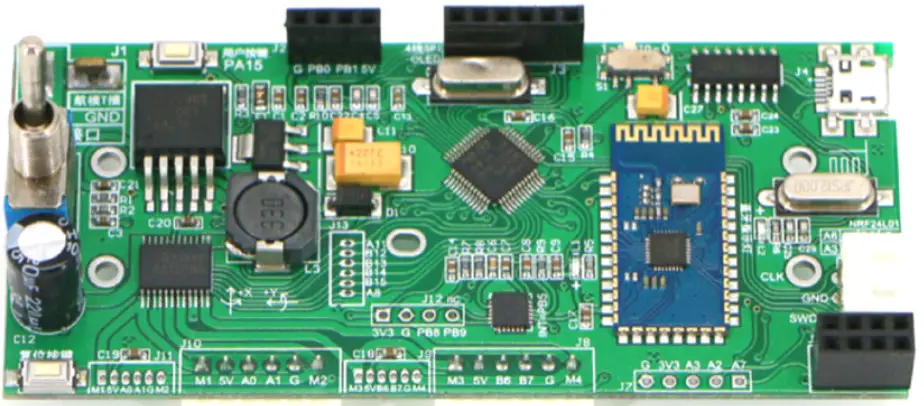
1.3 STM32 控制板(电机控制和 IMU)
Pickerbot Pro 配备 STM32 控制板,用于底盘和电机控制。该控制板可确保低功耗、精确的电机控制、用于监控电机的 OLED 读数显示器和惯性测量单元 (IMU)。它可以配置为更专业的操作,或启用编码器反馈到 Jetson Orin 控制器。使用软件包 Keil 和 FlyMCU 进行编译并随后刷新 STM32F103。
| STM32F103RC | 特征 |
| 核 | ARM32 位 Cortex -M3 CPU 最大速度 72 MHz |
| 回忆 | 512 KB 闪存 64kB SRAM |
| 时钟、复位和电源管理 | 2.0 至 3.6 V 应用电源和 I/O |
| 力量 | 睡眠、停止和待机模式 RTC 和备份寄存器 BAT 的 V 电源 |
| 直接接入 | 12通道DMA控制器 |
| 调试模式 | 社署和 JTAG 接口 Cortex-M3 嵌入式跟踪宏单元 |
| I/O 端口 | 51 个 I/O 端口(可映射到 16 个外部中断向量和 5V 容限) |
| 计时器 | 4×16位定时器 2 x 16 位电机控制 PWM 定时器(带紧急停止功能) 2 x 看门狗定时器(独立和窗口) SysTick 计时器(24 位递减计数器) 2 个 16 位基本定时器,用于驱动 DAC |
| 通信接口 | USB 2.0 全速接口 SDIO 接口 CAN 接口(2.0B 有源) |
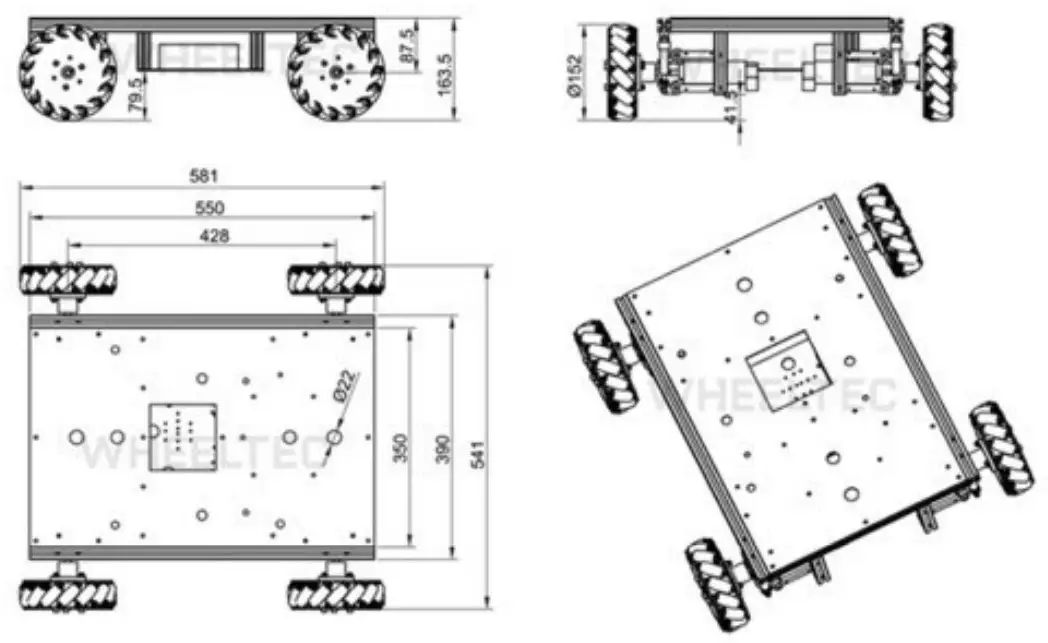
1.4 底盘view 和电池选项
Pickerbot Pro 配备全向麦克纳姆轮,每个轮子都有 45 度偏移滚轮,方便机器人向各个方向移动。需要注意的是,这些轮子是成对提供的,每对轮子的滚轮方向不同。在机器人上安装时,确保对角线相对的轮子的滚轮指向同一方向。如果机器人意外移动,只需调换轮子即可。
增加电池容量时必须考虑一些因素。Pickerbot Pro 标配 5000 mAh 电池,可以额外付费升级到 10,000 或 20,000 mAh 电池。20,000 mAh 电池太大,无法放入 Pickerbot Pro 底盘内,只能安装在机器人底盘顶部。请参阅下表了解重量和尺寸参数。
| 电池参数 | 特征 | ||
| 5000毫安时 | 10000毫安时 | 20000毫安时 | |
| 电池容量tage | 22.2伏 | 22.2伏 | 22.2伏 |
| 尺寸 | 124*71*42毫米 | 124*71*71毫米 | 156*122*71毫米 |
| 电源充电器 | DC 5.5充电插头 T型放电塞 |
DC 5.5充电插头 T型放电塞 |
DC 5.5充电插头 T型放电塞 |
| 表现 | 连续15A 释放 |
30A连续放电 | 60A连续放电 |
| 重量 | 0.66公斤 | 1.25公斤 | 2.4公斤 |
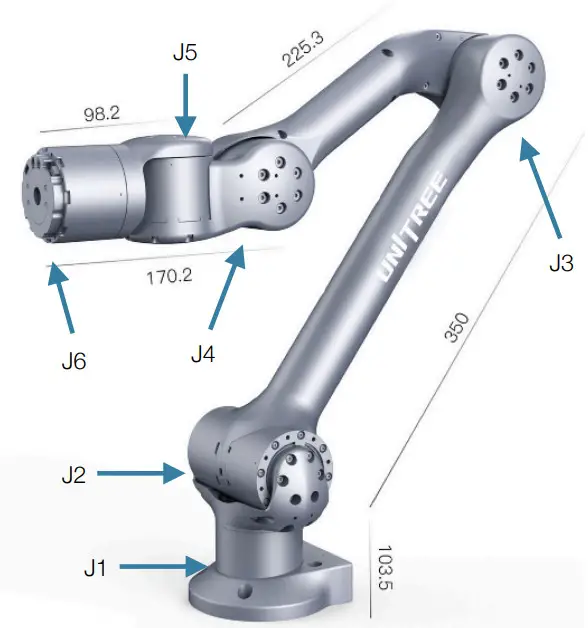
1.5 Unitree Z1 Pro机械臂
Pickerbot Pro 采用了 Unitree Z1 Pro 机械臂,该机械臂具有 6 个自由度和 740 毫米的伸展范围,可提供出色的关节灵活性。请参阅下面的关节参数表,以定制运动学以满足您的特定要求。
| 联合的 | 运动范围 | 最大速度 | 最大扭矩 |
| J1 | ±150° | 180°/秒 | 33牛·米 |
| J2 | 0—180° | 180°/秒 | 33牛·米 |
| J3 | -165°—0 | 180°/秒 | 33牛·米 |
| J4 | ±80° | 180°/秒 | 33牛·米 |
| J5 | ±85° | 180°/秒 | 33牛·米 |
| J6 | ±160 | 180°/秒 | 33牛·米 |
| 范围 | Z1 Pro |
| 重量 | 4.5公斤 |
| 有效载荷 | 3公斤 |
| 抵达 | 740毫米 |
| 重复性 | ~0.1毫米 |
| 电源 | 24伏 |
| 界面 | 以太网 |
| 兼容的操作系统 | Ubuntu |
| 最大功率 | 500 瓦 |
| 力反馈 | 是的 |
软件和入门
2.1 ROS 2 快速入门
机器人首次通电时,默认由 ROS 控制。也就是说,STM32 底盘控制器板接受来自 ROS 2 控制器(Jetson Orin)的命令。
初始设置快速简便,从主机 PC(推荐 Ubuntu Linux)连接到机器人的 Wi-Fi 热点。默认密码为“dongguan”。
接下来通过Linux终端使用SSH连接机器人,IP地址为192.168.0.100,默认密码为dongguan。
![]()
通过终端访问机器人,您可以导航到 ROS 2 工作区文件夹,位于“wheeltec_ROS 2”下。在运行测试程序之前,导航到 wheeltec_ROS 2/turn_on_wheeltec_robot/ 并找到 wheeltec_udev.sh – 必须运行此脚本,通常只运行一次以确保外围设备的正确配置。
您现在可以测试机器人的功能,要启动 ROS 2 控制器功能,请运行:“roslaunch turn_on_wheeltec_robot turn_on_wheeltec_robot.launch”
![]()
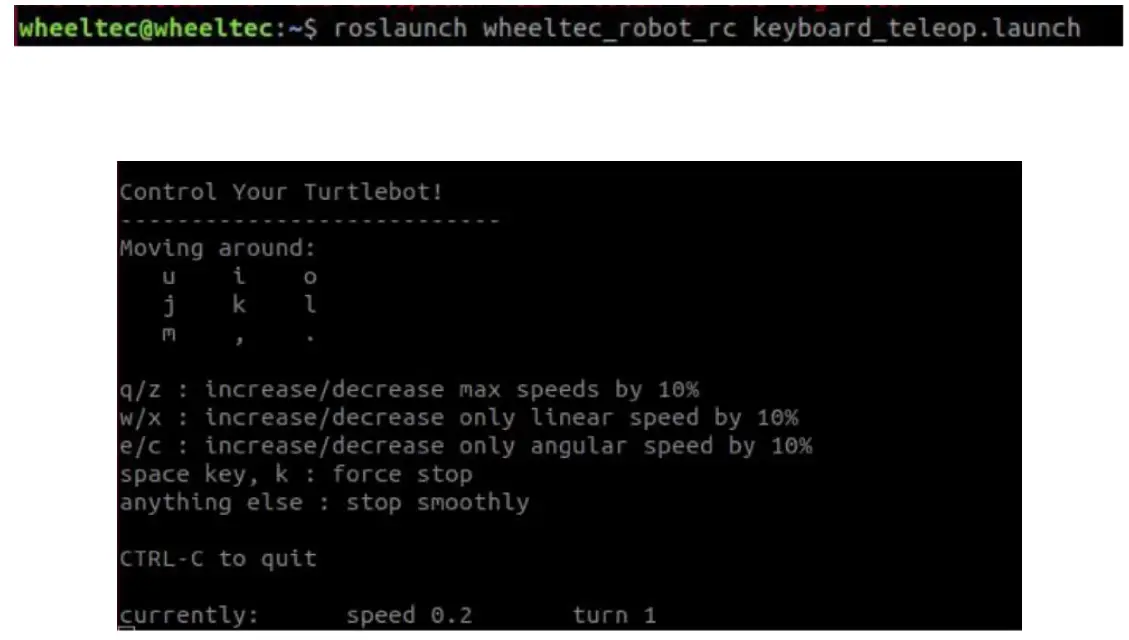
在第二个终端中,您可以使用 keyboard_teleop 节点来验证底盘控制,这是流行的 ROS 2 Turtlebot ex 的修改版本amp输入:“roslaunch wheeltec_robot_rc keyboard_teleop.launch”
2.2 底盘预装的 ROS 2 软件包
以下是面向用户的包,虽然可能存在其他包,但这些只是依赖项。
turn_on_wheeltec_robot
该包对于实现机器人功能以及与底盘控制器的通信至关重要。
每次启动时都必须使用主脚本“turn_on_wheeltec_robot.launch”来配置 ROS 2 和控制器。
wheeltec_rviz2
包含使用 Pickerbot Pro 的自定义配置启动 rviz 的启动文件。
wheeltec_robot_slam
针对 Pickerbot Pro 具有自定义配置的 SLAM 地图绘制和定位包。
wheeltec_robot_rrt2
快速探索随机树算法——该包使 Pickerbot Pro 能够通过启动探索节点来规划到达其所需位置的路径。
wheeltec_robot_keyboard
方便的软件包,用于验证机器人功能和使用键盘进行控制,包括从远程主机 PC 进行控制。
wheeltec_robot_nav2
ROS 2 导航 2 节点包。
车轮技术_激光雷达_ROS 2
用于配置Leishen M2/N10的ROS 10激光雷达包。
wheeltec_joy
操纵杆控制包,包含操纵杆节点的启动文件。
简单跟随者ROS 2
使用激光扫描或深度相机的基本物体和线路跟踪算法。
ROS 2_astra_相机
Astra 深度相机包,带有驱动程序和启动文件。
机械臂集成
3.1 机械臂接线组件
Unitree Z1 推荐接线
以下是 Unitree Z1 臂的推荐接线组件。电源开关后的分线器上应该有一个可用的母 2 极 dean 连接器。将组件串联。确保连接器 +/GND 连接匹配。刀片保险丝座应位于正极电源线上。
| 成分 | 数量 |
| 公头 Deans 型 2 极连接器 | x1 |
| 公头 xt60 型 2 极连接器 | x1 |
| 直列刀片保险丝座 | x1 |
| 14 AWG 2 芯电缆 | x1 |
| 7.5 插片保险丝 | x1 |
由于臂只有相对编码器,因此每次启动时都必须将其重置到相同位置。您可能会发现在电缆中串联一个开关很有用,这样可以轻松打开和关闭臂以进行重置。
笔记: Unitree 文档称该臂的额定电流为 20A。这是不正确的。每个电源串联一个 10A SMD 保险丝。使用 7.5A 保险丝会先于 10A SMD 保险丝熔断,更换起来会容易得多。
笔记: 由于系统上的 unitree Z1 臂的额外重量,前弹簧无法支撑臂。可以找到 70mm*16mm 的嵌入式压缩弹簧,并用其代替原装弹簧。或者,可以使用包围减震器的大型弹簧。
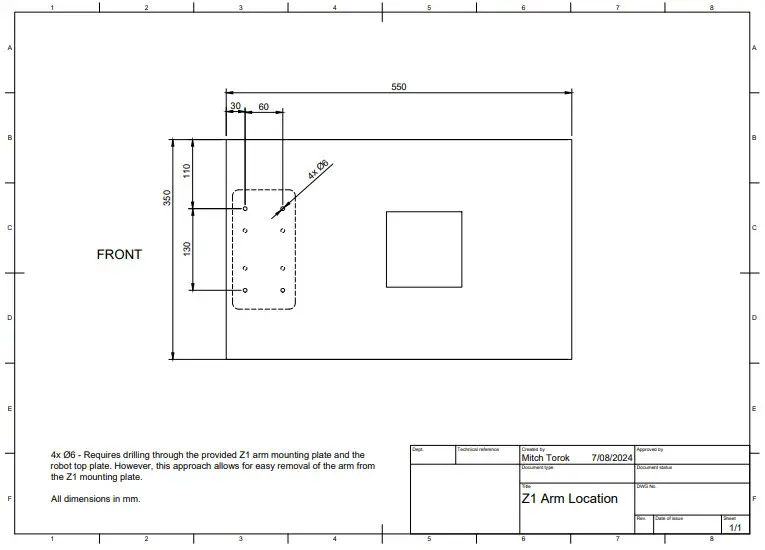
3.2 机械臂安装图
3.3秒amp机械臂代码
在编写本用户手册时,Unitree 的 Z1 Pro SDK 仅支持 ROS 1 Melodic 或 Noetic。
Pickerbot Pro 产品团队开发了ampROS 2 Humble 中的代码与底盘兼容。
在Samp将 Z1 Pro 机械臂与底盘集成的代码可从以下 GitHub 存储库找到:
https://github.com/roboworksdev/pickerbotproarm
www.roboworks.net
版权所有 © 2024 Roboworks。 版权所有。
文件/资源
 |
ROBOWORKS Pickerbot Pro 拾放移动机器人 [pdf] 用户手册 Pickerbot Pro、Pickerbot Pro 拾放移动机器人、拾放移动机器人、放下移动机器人、移动机器人、机器人 |