![]() E108-GN系列多模卫星
E108-GN系列多模卫星
定位导航模块
用户手册
E108-GN系列
GPS/北斗多模卫星定位及
导航模块
免责声明
EBYTE 保留对本文档及其所含信息的所有权利。
本文所述的产品、名称、徽标和设计可能全部或部分受知识产权保护。 未经 EBYTE 明确许可,严禁复制、使用、修改或向第三方披露本文档或其任何部分。
本文包含的信息按“原样”提供,EBYTE 对信息的使用不承担任何责任。 不提供任何明示或暗示的保证,包括但不限于信息的准确性、正确性、可靠性和针对特定用途的适用性。 EBYTE 可能随时修订本文件。 如需最新文档,请访问 www.cdebyte.com.
产品结束view
1.1产品介绍
E108-GN系列是一款高性能、高集成、低功耗、低成本的多模卫星定位导航模块,适用于BDS/GPS/GLONASS,体积小,功耗低,可用于汽车导航、智能穿戴、无人机等GNSS定位应用中,还提供与其他模块厂商兼容的软硬件接口,大大缩短了用户的开发周期。
该模块采用射频基带一体化设计,集成DC/DC、LDO、射频前端、低功耗应用处理器、RAM、Flash存储、RTC和电源管理等。支持晶振或外部引脚时钟输入,它可以通过纽扣电池或法拉电容器输入,为 RTC 和备用 RAM 供电,以减少首次修复时间。 它还支持多种方式与其他外设连接,支持UART和GPIO接口。 如需I2C、SPI接口,请联系客服定制。 
1.2 特点
- 支持BDS/GPS/GLONASS多系统联合定位和单系统独立定位:
- D-GNSS差分定位、A-GNSS辅助定位、星历预测、DR组合导航应用,最快数据更新率10Hz;
- 32位应用处理器,最高主频133MHz,支持动态频率调整;
- 支持PPS输出;
- 内置复位控制器;
- UART、GPIO接口;
- RITC:支持32.768KHz=20ppm晶振,1.1 VRTC时钟输出,支持外部信号唤醒;
- 输出格式:支持NMEAO183V4。 1及之前版本,最大固定更新频率可达10Hz;
- 灵敏度高:捕获冷启动-149dBm,热启动-162dBm,跟踪-166dBm;
- 软硬件兼容其他厂家,大大缩短用户开发周期;
1.3 应用
- 车辆定位导航设备:
- 可穿戴设备,如GPS追踪器等;
- 无人机定位、工控机等;
- 需要GNSS定位或导航的行业设备;
版权所有 ©2012-2021。 成都亿佰特电子科技有限公司
规格参数
2.1 工作参数
| 主要参数 | 表现 | 评论 | |||
| 最小。 | 类型。 | 最大限度。 | |||
| 工作量tag电子 (V) | 3.0 | 5.0 | 6. | >5.0V可以保证输出功率 | |
| 通信级别(V) | 3. | 5V TTL 有烧坏的风险 | |||
| 工作温度(℃) | 45 | – | +85 | 工业级设计 | |
| 工作频段(MHz) | 2400 | – | 2518 | 支持ISM频段 | |
| 力量 消耗 |
发射电流 (mA) | 35 | 瞬时功耗 | ||
| 接收电流(毫安) | 20 | ||||
| 休眠电流 (pA) | 120 | 软件关机 | |||
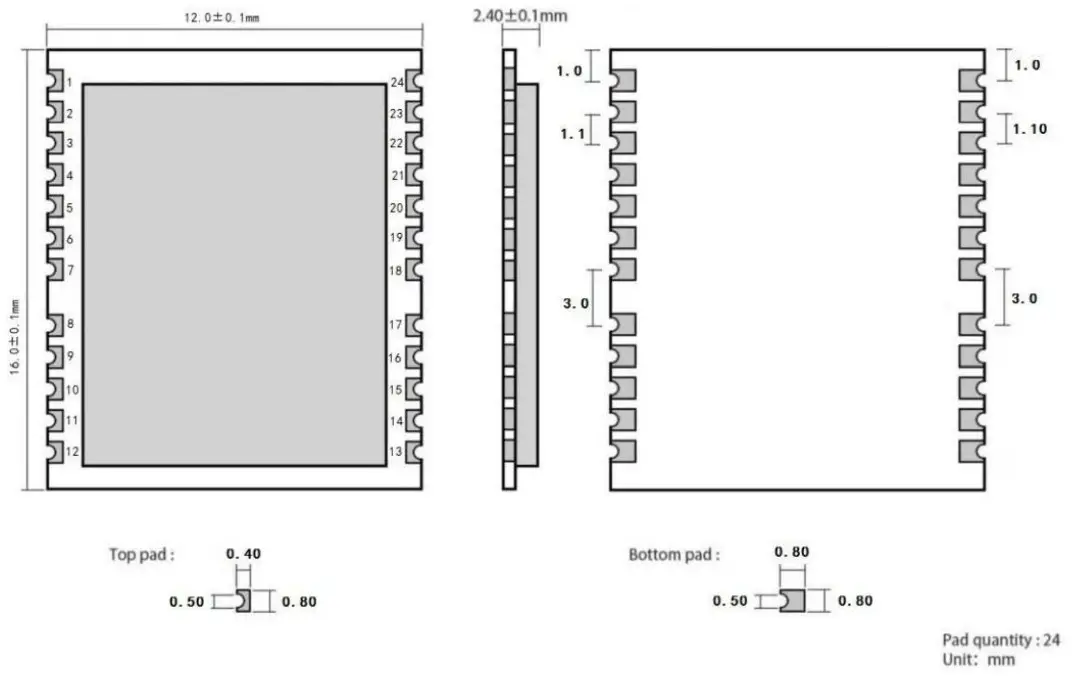
2.2 硬件参数
| 主要参数 | 描述 | 评论 |
| 波特率 (bps) | 9600-921600 | 默认9600 |
| 数据位 | 8位 | |
| 停止位 | 1 | |
| 通信接口 | UART(TXD/RXD)或GPIO | |
| 包装方法 | 半孔 | 表面贴装技术 |
| 方面 | 请参阅第 3 章引脚定义 | |
| 天线接口 | Stamp 洞 | |
| 协议书 | 支持NMEA0183 V4.1及之前版本 | 最大固定更新频率高达 10Hz |
| 支持的定位系统 | 北斗/GPS/格洛纳斯 |
2.3 GPS性能参数
| 类别 | 索引项 | 典型值 | 单元 |
| 定位时间(测试条件 1) | 冷启动 | 28. | s |
| 热启动 | <1 | s | |
| 夺回 | <1 | s | |
| 定位时间(测试条件 1) | 导航卫星系统 | <10 | s |
| 灵敏度(测试条件 2) | 冷启动 | -149 | 分贝毫瓦 |
| 热启动 | -162 | 分贝毫瓦 | |
| 夺回 | -164 | 分贝毫瓦 |
| 追踪 | -166 | 分贝毫瓦 | |
| 精确 (测试条件 3) |
水平定位精度 | 3. | m |
| 定位精度高 | 4. | m | |
| 速度定位精度 | 0.1 | 多发性硬化症 | |
| 计时精度 | 30 | ns | |
| 功耗 (测试条件 4) |
捕获电流 | 35 | mA |
| 跟踪电流 | 20 | mA | |
| 工作温度 | — | -35℃至85℃ | — |
| 存储温度 | — | -55℃至100℃ | — |
| 湿度 | — | 5%-95%RH(无冷凝) | — |
笔记: 以上结果为GPS/Badious双模工作模式; 最高海拔可达18,000米,但超过10,000米后数据精度就会出现偏差。
【测试条件1】:接收卫星数大于6颗,所有卫星信号强度为-130dBm,测试10次取平均值,定位误差在10米以内。
【测试条件2】:外置LNA噪声系数0.8,接收卫星数大于6颗,五分钟内锁定或不失锁情况下的接收信号强度值。
【测试条件3】:空旷无遮挡环境,24小时连续通电测试,50%CEP。
【测试条件4】:接收卫星数大于6颗,所有卫星信号强度为-130dBm。
尺寸和引脚定义
3.1 E108-GNO1 管脚定义
| 不。 | 姓名 | 方向 | 功能 |
| 1 | NC | 剩余引脚 | |
| 2 | NC | 剩余引脚 | |
| 3 | 1PPS | 位置指示 | 定位成功,输出方波 |
| 4 | EINT3 | 外部3中断 | 默认:下拉,8mA驱动电流 |
| 5 | FORCE_ON | 助眠醒神丸 | 当模块进入低功耗模式时,将该引脚拉高即可退出低功耗模式(电平voltag该引脚的电压为1.1V,如果控制引脚的电平不是11V,则需要对电压进行分压tage) |
| 6 | 英托 | 外部中断 0 | 默认:下拉,8mA驱动电流 |
| 7 | NC | 剩余引脚 | |
| 8 | RSTN | 复位引脚 | 默认拉高,拉低复位。 |
| 9 | VCC_RF | 射频功率输出 | 有源天线电源(此射频输出电源voltage 等于 VCC) |
| 10 | 地线 | 模块接地 | |
| 11 | 射频输入 | 射频输入 | |
| 12 | 地线 | 模块接地 | |
| 13 | 地线 | 模块接地 | |
| 14 | NC | 剩余引脚 | |
| 15 | NC | 剩余引脚 | |
| 16 | RSTN | 复位引脚 | 默认拉高,拉低复位 |
| 17 | EINT1 | 外部1中断 | 默认:下拉,8mA驱动电流 |
| 18 | TX1 | UART1输出 | (保留,28V电平) |
| 19 | RX1 | UART1输入 | (保留,28V电平) |
| 20 | 发送端 | UART输出 | (AT口,28V电平) |
| 21 | 接收数据 | UART输入 | (AT口,28V电平) |
| 22 | VBKP | RTC电源输入 | RTC电源必须上电,模块 |
| 23 | 电压控制电路 | 模组电源 | 模块启动卷tage 需要提供稳定的音量tage 为 4.2V。 如果启动卷tage低于该值,可能会导致串口无法打印。 年龄启动,可降低不正常3.3pV voltage 操作。 |
| 24 | 地线 | 模块接地 |

| 不。 | 姓名 | 方向 | 功能 |
| 1 | 地线 | 模组电源 地线 |
|
| 2 | 发送端 | 输出 | UART输出(2.8V电平) |
| 3 | 接收数据 | 进入 | UART输入(2.8V电平) |
| 4 | 1PPS | 第二输出脉冲 | 用户可通过指令设置频率、时长等 |
| 5 | 强制开启 | 休眠唤醒引脚 | 当模块进入超低功耗模式时,将该引脚拉高退出超低功耗模式(该引脚供电 |
| 6 | VBKP | RTC电源输入 | 卷tage为11V,如果控制脚电平不是11V,需要分压tage) |
| 7 | NC | 剩余引脚 | |
| 8 | 电压控制电路 | 模组电源 | (2.8V-4.2V) |
| 9 | RSTN | 复位引脚 | 默认拉高,拉低复位; |
| 10 | 地线 | 模块接地 | |
| 11 | 射频输入 | 射频输入 | |
| 12 | 地线 | 模块接地 | |
| 13 | 安东 | 外部的 | 外接LNA或有源天线电源控制脚28V电平: |
| 14 | VCRF | 射频功率输出 | 外部有源天线的电源(此 VCC RF 输出电压tage 等于 VCC) |
| 15 | NC | 剩余引脚 | |
| 16 | NC | 剩余引脚 | |
| 17 | NC | 剩余引脚 | |
| 18 | NC | 剩余引脚 |
3.3 E108-GNO02D 管脚定义
| 不。 | 姓名 | 方向 | 功能 |
| 1 | CE | 电源使能端 | 电源使能端,可拉低进入低功耗模式(默认为高电平) |
| 2 | 1PPS | 1PPS输出 | 1PPS输出,用户可通过命令设置频率、时长等 |
| 3 | 地线 | 模块电源地线 | |
| 4 | 发送端 | 输出 | UART输出(2.8V电平) |
| 5 | 接收数据 | 进入 | UART输入(2.8V电平) |
| 6 | 电压控制电路 | 模块电源(3-.5.5V) |
推荐电路图
4.1 E108-GNO1

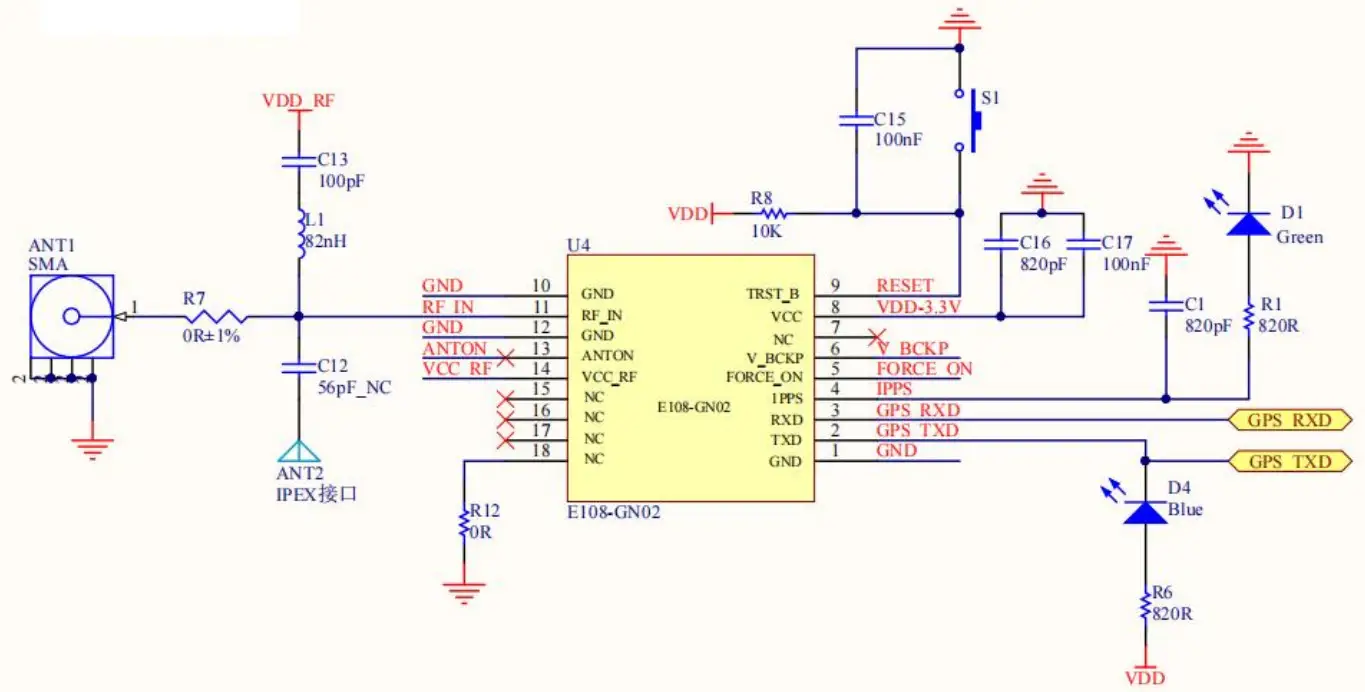
4.2 E108-GN02
4.3 E108-GN02D

硬件设计
- 模块原理图设计可直接参考资料包中的E108-GNO1-TB-SCH;
- 推荐使用直流稳压电源给模块供电,电源纹波不超过50mV,模块必须可靠接地;
- 请注意电源正负极的正确连接,如反接可能对模块造成永久性损坏;
- 请检查电源以确保它在推荐的电源电压之间tages。 如果超过最大值,模块将永久损坏;
- 串口TXD和RXD为LVTTL电平,如果与PC相连,需要经过RS232电平转换。 用户可以使用该串口接收定位信息数据和软件升级;
- 本模块为温度敏感器件,温度剧烈变化会导致性能下降。 使用过程中尽量远离高温气流和大功率加热设备;
- 在为模块设计供电电路时,往往建议预留30%以上的余量,这样整机才能长期稳定工作;
- 模块应尽量远离电源、变压器、高频布线等电磁干扰较大的部位。 模块下方必须避免高频数字接线、高频模拟接线、电源接线。
- 假设模块焊接在Top Layer上,模块接触部分的Top Layer上覆盖有地铜(全铜且接地良好),必须靠近模块的数字部分,并在Bottom上走线层;
- 假设模块焊接或放置在Top Layer,在Bottom Layer或其他层随意走线也是错误的,会不同程度地影响模块的杂散和接收灵敏度;
- 假设模块周围存在电磁干扰较大的设备,也会极大地影响模块的性能。 建议根据干扰强度远离模块。 如果情况允许,可以做适当的隔离和屏蔽;
- 假设模块周围存在电磁干扰较大的走线(高频数字、高频模拟、电源走线),也会极大影响模块的性能。 建议根据干扰强度远离模块。 适当的隔离和屏蔽;
- 天线安装结构对模块性能影响很大,确保天线外露,最好垂直向上;
- 模块安装在机壳内时,可使用优质天线延长线将天线延长至机壳外;
- 天线不得安装在金属外壳内,这样会大大削弱传输距离。
E108-产品测试
6.1 串口助手
基于E108-GNO1-TB进行测试,如果没有测试板,可以参考资料包中的背板原理图(此测试内容同样适用于E108-GN02/D)。 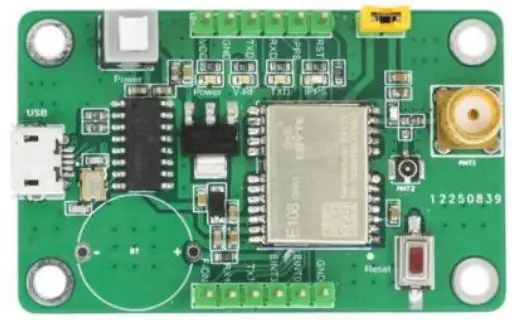
- 连接GPS天线后,同时通过USB线连接电脑,板子天线对面有一个USB接口,然后按开关按钮开机。
- 注意,使用有源天线时,RE_POWER 的两个引脚需要用跳线短接。
- 可以打开串口助手 view 串口上报的数据,或者使用我们的Navi Track view 它。
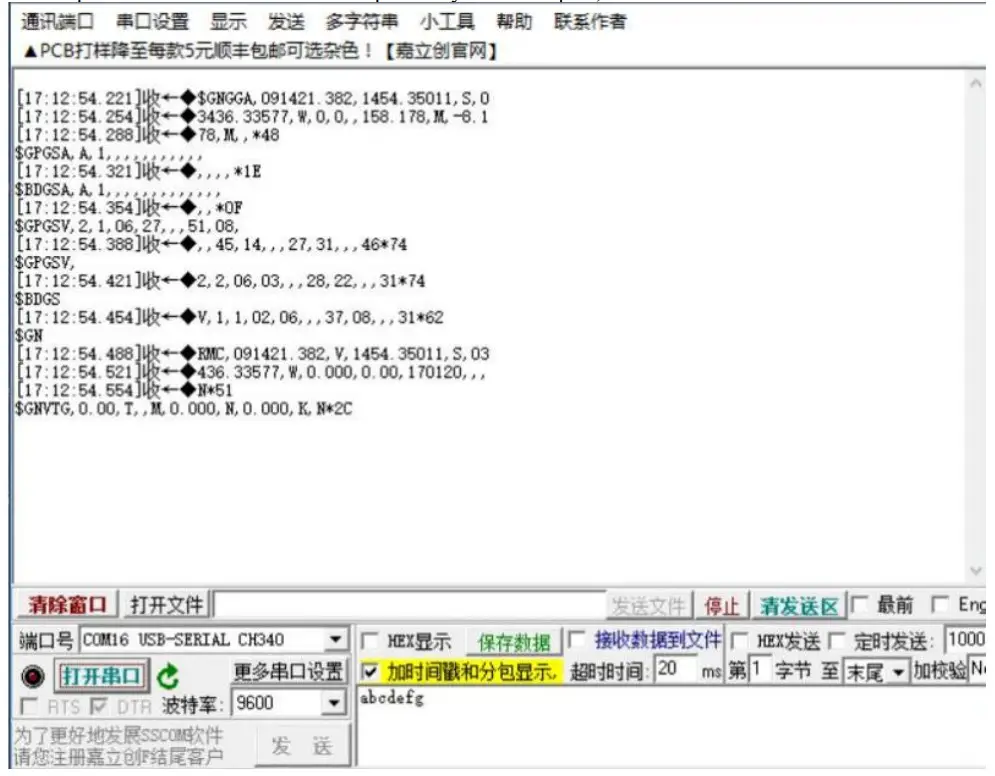
当波特率设置为9600bps时,打开串口后会一直上报数据。 常见的输出格式如下:
GGA:时间、地点、卫星数量;
GSA:GPS接收机工作模式,用于定位的卫星,DOP值,定位状态;
GSV:可见GPS卫星信息、仰角、方位角、信噪比;
RMC:时间、日期、位置、速度;
VTG:地速信息(详见NMEAO183协议);
6.2 操作 naviTrack
为了方便使用,我们推荐使用专属工具TaviTrack进行调试。 详细信息请参见《Navi Track 用户手册》。
- 以管理员权限运行Navi Track并运行以下页面:
- 选择对应的com口,点击connect。 连接成功后,可以在NMEA窗口看到上报的数据。
笔记: 详细含义请参考第3节NMEAO183协议中的描述。 - 定位成功后,可以在串口上报的SGPRMC字段中获取经纬度信息。
更详细的工具使用信息,请参考工具。 套件中的手册。

命令格式
7.1 GKC接口数据格式
Gocke Command(GKC)界面是用户与GK9501之间交互的界面。 其命令格式如下:
| $PGKC | 命令 | 参数 | * | 校验和 | CR | LF |
7.2 GKC 命令
| 姓名 | 描述 | 评论 |
| 命令 | 表示发送的命令号 | 参考值参考下一条GKC指令 |
| 参数 | 表示发送命令所需的参数,参数可以多个,不同的命令对应不同的数据 | 参考值参考下一条GKC指令 |
| * | 数据符号结束 | |
| 校验和 | 整个命令的校验和数据 | 校验和值位于 PGKC 的整个命令中 到 |
| CR。 如果 | 包装结束标志 | *前一个参数异或值,如“SPGKCO30,3,1”,其校验值为“PGKCO30,3,1”的异或值,其异或值为2E |
7.2.响应消息
命令:001 回复消息
对对方发送的消息处理结果的响应
参数:
Argil:该消息响应的消息的命令
ARG2:
1″,不支持接收到的消息
2″,消息有效,但执行不正确
3”,有效消息,并正确执行
Examp乐:
发送单个 GPS 命令:SPGKC115,1,0,0,0-2B
回复信息:SPGKC001,115,3,1,0,0,0,0,1*28
7.2.2 系统重启
命令:030
系统重启命令
参数:
精氨酸:
1″,热启动
2″,热启动
37、冷启动
4英寸,全冷启动
精氨酸:
》17、软件重启
“2”、硬件重启
3″,清除NV RAM,保持闪存重启
Examp乐:
全冷启动指令:SPGKC030,4,2#2 A 热启动命令:SPGKC030,1,1¥*2C
备注:无论是热启动还是热启动,Arg2 都设置为 1,Arg? 完全冷启动时为 1、2 和 3。
一般来说,冷启动为全冷启动模式,Argl设置为4,Arg2设置为2,不使用硬件启动模式。
7.2.3 擦除辅助信息
命令:040
擦除flashArguments中的辅助信息:无
Examp乐:
$PGKC040*2B
7.2.4 低功耗模式
命令:051
进入待机低功耗模式
参数:
Argl:“0”,停止模式
Examp乐:
$PGKCO051,0*37
该命令可以通过发送任意命令来唤醒,也可以使用无效命令,可以通过插拔串口来唤醒硬件,也可以直接发送原来的低功耗命令。
7.2.5 消息间隔配置
命令:101
配置输出NMEA消息的时间间隔(单位:ms)
参数:
粘土:100-10000
Examp乐:
SPGKC101,1000%02
命令集是每隔1000ms输出一次NMEA数据,也就是1s。
备注:当设置2HZ以上报文间隔输出时,首先将波特率提高到115200以上,以保证高频NMEA报文输出。 该命令不保存在Flash中,掉电后会恢复到原来的NMEA输出频率; 波特率修改需要固件版本3.0以上支持配置,NMEA频率不支持保存。
7.2.6 周期性低功耗模式
命令:105
进入周期性低功耗模式
参数:
精氨酸:
*0″,正常工作模式
》1、周期超低功耗跟踪模式
“4”,直接进入超低功耗跟踪模式
8”,低功耗模式,可通过串口发送命令唤醒
ARG2:
运行时间 (ms),此参数在 Arg1 = 1 的周期模式下有效。
ARG3:
睡眠时间(毫秒),在Argl为1的周期模式下,该参数起作用。
Examp乐:
$PGKC105,8*3F
$PGKC105,1,5000,8000*3B
笔记: 低功耗模式下,CPU会休眠,可通过串口唤醒; 超低功耗跟踪模式下,当CPU断电时,会自动周期性唤醒进行定位输出。
7.2.7 设置搜星模式
命令:115
设置搜星模式
参数:
粘土:
“1”,吉普森
“0”,GPS 关闭
ARG2:
“1”,拾取
“0”,拾取
精氨酸3;
“1”,坏的
“0”,坏关
参数:
“1”,伽利略
“0”,伽利略关闭
Examp乐:
设置搜星模式为单GPS模式,命令如下:$PGKC115,1,0,0,042B
笔记: 虽然单个伽利略模式命令 SPGKC115,0,0,0,1*2B 可以发送成功,但目前的 GK9501 固件不支持伽利略搜星模式。
7.2.8 保存搜星模式
命令:
121
设置搜星模式,保存到Flash
参数:
精氨酸:
“1”,GPSon
“0”,GPS 关闭
ARG2:
“1”,格洛纳斯开启
“0”,格洛纳斯关闭
ARG3:
“1”,北斗开启
“0”,北斗关闭
参数:
“1”,伽利略
“0”,伽利略关闭
Examp乐:
将寻星模式设置为单 GPS 模式
SPGKC121,1,0,0.0¥2C
备注:Command115 和 121 命令的区别在于 115 命令设置后不会保存在 flash 中,重启后设置的搜星模式会消失,121 命令设置会保存在 flash 中,设置后搜星模式设置会消失。重启会保留下来,115和121都不支持伽利略星系。
7.2.9 串口参数设置
命令:146
设置串口输入输出格式和波特率
参数:
精氨酸:
37、NMEA格式
ARG2:
”37、NMEA 格式
ARG3:
9600、19200、38400、57600、115200……921600。
Examp乐:
SPGKC146。 3*3F
7.2.10 设置 NMEA 输出
命令:147
设置NMEA输出波特率;
参数:
精氨酸:
9600、19200、38400、57600、115200……921600、
Examp乐:
$PGKC147,115200¥06
7.2.11 GPD文件删除
命令:047
删除闪存中的 GPD 文档
参数:无
Examp乐:
SPGKCO47*2C
7.2.12 设置NMEA串口参数
命令:149
设置NMEA串口参数
参数:
精氨酸:
“0”,NMEA 数据
“1”,二进制数据
参数2:9600。 19200、38400、57600、115200……921600。
Examp乐:
SPGKC149。 0*38400℃
SPGKC149。 1%115200
备注:该命令一般用于AGPS加载GPD file写入Flash; 波特率修改需要固件版本3.0以上支持配置;
7.2.13 PPS 配置
命令:
161
PPS配置
参数:
精氨酸:
“0”,关闭PPS输出
“17、第一次修复
27、3D修复
“37、2D/3D修复
“4”,始终开启
ARG2:
PPS 脉冲宽度(毫秒)
ARG3:
PPS 脉冲周期(毫秒)
Examp乐:
SPGKCI61。 2. 500, 2000%0
笔记: PPS的脉冲宽度最大为998ms,最小为1ms,脉冲周期最小范围为1000ms。
7.2.14 查询消息间隔
命令:201
NMEA 消息的查询间隔 参数: 无
Examp乐:
$PGKC201*2C
7.2.15 返回消息间隔
命令:202
返回NMEA消息的时间间隔(响应201命令)
参数:无
Examp乐:
$PGKC202 。 1000*0
7.2.16 设置 NMEA 输出频率
命令; 第242章
设置NMEA语句输出频率
参数:
精氨酸:GLL
精氨酸2:RMC
精氨酸3:VIG
参数:GGA
参数:GSA
精氨酸6:GSV
精氨酸7:GRS
精氨酸 8:商品及服务税
阿尔戈~Arg21:
Examp乐:
保持
$PGKC242,1,1,1,1,1,1,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0+37
7.2.17 查询NMEA输出频率
命令:243
查询NMEA语句输出频率
参数:无
Examp乐:
$PGKC243*2A
7.2.18 返回NMEA输出频率
命令:244
返回NMEA语句输出频率(响应243命令)
参数:
Args:参考242条命令
Examp乐:
$PGKC244,1,1,1,1,1,1,0,0,0,0,0,0,0,0,0,0.0,0,0,0,0%3 1
7.2.19 设置参考坐标
命令:269
设置参考坐标
参数:
粘土:“0”,WGS84
Examp乐:
$PGKC269.0*3E
7.2.20 查询参考坐标系
命令:270
查询参考坐标系
参数:无
Examp乐:
$PGKC270*2A
7.2.21 返回参考坐标系
命令:271
恢复到参考系(响应命令 270)
参数:
Argil:参考269条命令
Examp乐:
PGKC271 美元。 0*37
7.2.22 查询RTC时间
命令:279
查询RTC时间
参数:无
Examp乐:
SPGKC279*23
7.2.23 返回 RTC 时间
命令:280
返回 RTC 时间(响应命令 279)
参数:
参数:
参见 278 命令
Examp乐:
$PGKC280,2017,3,15,12,0,015
7.2.24 设置速度阈值
命令:284
设置速度阈值,当速度低于阈值时,输出速度为0
参数:
精氨酸:
门槛值
Examp乐:
$PGKC284.0.5*26
笔记: 速度单位为米/秒。 如果速度设置为负数,该命令不生效,保持原速度阈值输出。
7.2.25 设置HDOP阈值
命令:356
设置HDOP阈值,当实际HDOP大于阈值时,不定位
参数:
Argl:阈值
Examp乐:
$PGK(C356,0.7*2A 第639章
7.2.26 获取 HDOP 阈值
命令:357
获取 HDOP 阈值
参数:无
Examp乐:
$PGKC357*2E
7.2.27 版本号查询
命令:462
查询当前软件的版本号
参数:无
Examp乐:
$PGKC462*2F
7.2.28 返回当前版本号
命令:463
返回当前软件的版本号(响应462命令)
参数:无
Examp乐:
$PGKC463.GK9501_2.0_Aug 10 2020,国科微半*3F
7.2.29 设置位置和时间信息
命令:639
设置大概的位置和时间信息以更快定位
参数:
Argl:纬度,例如:28.166450
arg2:经度,例如:120.389700
arg3:高度,例如:0
参数:年份
参数:月份
阿尔杰:白天
Arg7:小时,时间为UTC时间
Arg8:积分
Arg9:秒
Examp乐:
SPGKC639.28.166450,120.389700,0,2017,3,15,12,0,0+33
备注:其中经纬度单位为度,高度为米
7.2.30 设置定位方式
命令:786
设置定位模式
参数:
精氨酸:
“0”,正常模式
》 1、步行、慢跑健身模式
2″,aero模式,适合高速运动模式
3”,气球模式,用于高程模式
Examp乐:
$PGKC786,1*3B
7.2.31 查询ID信息
命令:490
查询当前FLASH唯一ID信息。
参数:无
Examp乐:
SPGKC490*22
7.2.32 返回ID信息
命令:491
返回当前FLASH唯一ID信息(响应490命令)
参数:
精氨酸:
在 Flash 中制造和设计,例如amp乐:1351
ARG2:
UniqueID1,例如amp代码:32334C30,AE000230
ARG3:
UniqueID2,例如amp例: FF507900,FFFFFFFF
Examp乐:
$PGKC491,1351,32334C30,AE000230 FF507900,FFFFFFFF,*SE
7.3 支持NMEA0183协议
GK9501支持NMEAO183 V4.1协议,并兼容以前的版本。 有关 NMEA0183 V4.1 的更多信息,
请参考NMEA 0183 V4.1官方文档。 常见的输出格式如下:
GGA:时间、地点、卫星数量
GSA:GPS接收机工作模式、用于定位的卫星、DOP值、定位状态
GSV:可见GPS卫星信息、仰角、方位角、信噪比 RMC:时间、日期、位置、速度
VTG:地速信息
7.3.1 语句标识符
| 语句标识符 | 描述 |
| BD | BDS,北斗二代卫星系统 |
| GP | 全球定位系统 |
| GL | 格洛纳斯 |
| GA | 伽利略 |
| GN | GNSS,全球导航卫星系统 |
第732章
$-GGA hhmmss.ss,ILILa,yyyyy.yy.ax
XXX XX X,MXXMX X,XXxx*hh
Sample data: $GPGGA,065545.789,2109.9551,N,12023.4047,E,1,9,0.85,18.1.M.8.0,M.,*5E
| 姓名 | 前任ample | 单元 | 描述 |
| 消息标识 | $ GPGGA | GGA协议头 | |
| UTC 时间 | 065545.789 | 嗯哼.sss | |
| 纬度 | 2110. | ddmm.mmmm | |
| N/S指示 | N | N=北、南 | |
| 经度 | 12023. | ddmm.mmmm | |
| E/W指示 | E | W=西、东 | |
| 定位说明 | 0:未定位 1:SPS模式,定位有效 2:差动,SPS模式,定位有效 3:PPS模式,定位有效 |
||
| 卫星数量 | 9 | 范围 0 到 12 | |
| 高画质影片 | 0.85 | 水平精度 | |
| 麦斯劳 amp纬度 | 18. | M | |
| 单元 | M | M | |
| 地球 | -2。 | M | |
| 单元 | M | – | |
| 微分时间 | 8.0 | S | 无DGPS时无效 |
| 差异ID | 0 | ||
| 校验和 | *5E | ||
| CR,> | 消息结束 |
7.3.3 总务区
$-GSA,2,2 XX XXX XXX XXX X XXX X XXX X*hh
Samp文件数据:SGPGSA.A,3,10,24,12,32,25,21,15,2031,,,,1.25,0.85,0.91*04
| 姓名 | Example | 单元 | 描述 |
| 消息标识 | $GPGS | GSA 协议头 | |
| 模式 1 | A | M=手动,2D 或 3D 模式下的力 | |
| 模式 2 | 3 | A=汽车 | |
| 卫星使用 | 10 | 1:定位无效; 2:二维定位; 2:3D 定位 |
|
| 卫星使用 | 24 | 频道 1 | |
| 卫星使用 | 12 | 频道 2 | |
| 卫星使用 | 32 | 频道 3 | |
| 卫星使用 | 25 | 频道 4 | |
| 卫星使用 | 21 | 频道 5 | |
| 卫星使用 | 15 | 频道 6 | |
| 卫星使用 | 20 | 频道 7 | |
| … | … | … | … |
| 卫星使用 | 频道 12 | ||
| 局部多巴胺 | 1. | 定位精度 | |
| 高画质影片 | 0.85 | 水平精度 | |
| 虚拟机 | 0.91 | 垂直精度 | |
| 校验和 | *04 | ||
| 消息结束 |
7.3.4 GSV
$-GSVAXXXXXX,..*hh
Samp乐数据:
$GPGSV.3,1,12,14,75,001,31,32,67,111,38,31,57,331,33,26,47,221,20%73
$GPGSV.3,2,12,25.38,041,29,20,30,097,32,193,26,176.35,22,23,301 30%47
$GPGSV.3,3,12,10.20,185,28,44,20,250,,16,17,217,21,03,14,315,*7D
| 姓名 | Example | 单元 | 描述 |
| 消息标识 | $ GPGSV | GSV 协议头 | |
| 消息数量 | 3 | 范围 1 到 3 | |
| 留言编号 | 1 | 范围 1 到 3 | |
| 卫星数量 | 12 | ||
| 卫星ID | 14 | 范围 1 到 32 | |
| 仰角 | 75 | 程度 | 高达 90° |
| 方位角 | 1 | 程度 | 范围 0 至 359° |
| 载噪比 比率(C/No) |
31 | 分贝赫兹 | 范围 0 到 99,如果没有跟踪则为 null |
| 卫星ID | 32 | 范围 1 至 32,最高 90° | |
| 仰角 | 67 | 程度 | |
| 方位角 | 111 | 程度 | 范围 0 至 359° |
| 载噪比 比率(C/No) |
38 | 分贝赫兹 | 范围 0 到 99,如果没有跟踪则为 null |
| 卫星ID | 31 | 范围 1 到 32 | |
| 仰角 | 57 | 程度 | 高达 90° |
| 方位角 | 331 | 程度 | 范围 0 至 359° |
| 载噪比 比率(C/No) |
33 | 分贝赫兹 | 范围 0 到 99,如果没有跟踪则为 null |
| 卫星ID | 26 | 范围 1 到 32 | |
| 仰角 | 47 | 程度 | 高达 90° |
| 方位角 | 221 | 程度 | 范围 0 至 359° |
| 载噪比 比率(C/No) |
20 | 分贝赫兹 | 范围 0 到 99,如果没有跟踪则为 null |
| 校验和 | •73 | ||
| 消息结束 |
7.3.5个RMC
$--RMC hhmumss 55,4,I1LILa,yyyyy.yy.a
XXXX Xxxx,XX,a*hh 前amp数据
$GPRMC,100646.000,A,3109.9704.N,12123.4219.E.0.257,335.62,291216,,,A*59
| 姓名 | Example | 单元 | 描述 |
| 消息标识 | $ GPRMC | RMC协议头 | |
| UTC 时间 | 100646.000 | 韓國語.ss | |
| 状态 | A | A=数据有效; V=数据无效 | |
| 纬度 | 2110. | ddmm.mmmm | |
| N/S指示 | N | N=北,S=南 | |
| 经度 | 11123. | ddmm.mmmm | |
| FJW指示 | E | W=西,E=东 | |
| 地面速度 | 0.257 | 结(节) | |
| 位置 | 336. | 程度 | |
| 日期 | 291216 | 天啊 | |
| 磁变 | – | ||
| 校验和 | *59 | ||
| 消息结束 |
7.3.6 维格
$-VTGxXTXXMxXNxxK*hh
Samp文件数据:$GPVTG.335.62,TM,0.257.N,0.477,KA*38
| 姓名 | Example | 单元 | 描述 |
| 消息二) | $ GPVTG | VTG协议头 | |
| 位置 | 336. | 程度 | |
| 參考 | T | 真的 | |
| 位置 | 336. | 程度 | |
| 參考 | M | 磁的 | |
| 速度 | 0.257 | 结(节) | |
| 单元 | N | 部分 | |
| 速度 | 0.477 | 公里/小时 | |
| 单元 | K | 公里/小时 | |
| 单元 | A | 定位系统模式指示: A——自主模式; D——差模; E——估计(航位推算)模式; M——手动输入模式; S——模拟器模式; N——数据无效。 |
|
| 校验和 | *到 | ||
| 消息结束 |
GDP 用户指南
8.1 GDP介绍
GPD是Gocke定义的一种实现AGPS辅助定位的实现方法。 主要使用当前的导航数据Rinex file 来自 IGS web站点,然后转换成当前的星历,传输到芯片
通过串口,从而实现GPS芯片的加速定位。
8.2 如何获取 GPD 文档。
降低GPD file 通过查看 Gocke 的 GPD 服务器来思考当前时间 web网站(http://wwvw.goke-agps.com:7777/brdcGPD.dat). 自 IGS 发布实时星历以来 web站点每 2 小时更新一次,相对 GPD file 也是每2小时更新一次。
8.3 如何使用 GPD 文档。
通过GOKE提供的naviTrack工具通过串口上传到芯片。
- 芯片上电后,点击上方GPD图标旁边的“打开”按钮,选择GPD file 从网上下载。 被选中的 file 信息显示在工具下方。
- 之后 file 选择成功,点击“发送”按钮,工具开始上传。
- 稍等片刻,会出现完成提示框,表示上传成功,否则失败,重新上传。
8.4 如何删除芯片组中的 GPD 数据
由于GPD数据的有效期只有6小时,如果超过时限,芯片中存储的GPD数据将失效。 用户可以通过发送串口命令来清除芯片内的GPD数据。 当然,每次上传新的GPD数据时,原有的旧GPD数据都会先被清除。
删除GPD数据命令:在Navi Track导航工具的命令输入框中输入“PGK.C047”。
8.5 使用GPD后的效果
由于已经获取了当前可见卫星的星历数据,可以有效减少定位时间。 使用GPD后,冷启动定位时间可提高约10~15秒。 尤其是在信号较弱的情况下,能够更加提高定位速度。
8.6 加速 GPD 的辅助定位方法
由于纯GPD辅助还需要依赖搜索天空的GPS时间信息,所以有时在信号较差的情况下,仍然会消耗过多的时间。 通过PGKC639指令设置当前时间信息和粗略坐标信息可以实现更快的定位时间。
笔记: 通过639命令设置时,经纬度范围应在实际位置20km以内,时间偏差不超过5分钟。
命令:639
设置大概的位置和时间信息,以便更快定位。
参数:
Argl:纬度,例如:28.166450
Arg2:经度,例如amp乐:120.389700
Arg3:高度,eg:0 Arga:年份
参数:月份
参数:日
Arg7:小时,时间为UTC时间
Arg8:积分
Arg9:秒
Examp乐:
SPGKC639.28.166450,120.389700,0,2017,3,15,12,0,0+33
639命令执行成功后,GK9501会返回如下格式:SPGKC001,639.3+21
8.7 GPD 通信
主要是通过串口通信将GPD数据分块传输给芯片。 主要流程如下:
8.7.1 将 NMEA 接收切换为 BINARY 接收模式
(命令格式参考GK9501 Input and Output Format.pdf)
发送:消息类型+切换模式+波特率+校验和
数据:SPGKC149,1,115200*15
(GPD 传输的消息类型 149)
接收:包头(2B)+包长度(2B)+ACK类型(2B)+消息类型(2B)+有效标志(1B)+校验和(1B)+包尾(2B)
数据:Oxaa、0xf0、0x0c、0x00、0x01、0X00、0x95、0x00、0X03、(chk)、0x0d、0x0a
(校验和是从数据包长度字段的开始到校验和之前的字段逐字节异或)
8.7.2 发送GPD第一个数据块,等待ACK响应
发送:包头(2B)+包长度(2B)+传输类型(2B)+GPD包号(2B)+数据净荷(512B)+校验和(1B)+包尾(2B)
数据:Oxaa、0xf0、0x0b、0x02、0X066、0x02、0x00、0X00、…、(chk)、0x0d、Oa
接收:包头(2B)+包长度(2B)+ACK类型(2B)+GPD包号(2B)+有效标志(1B)+校验和(1B)+包尾(2B)
数据:Oxaa、0xf0、0x0c、0x00、0x03、0X00、0x00、0x00、0X01、(chk)、0x0d、0x0a
8.7.3 依次发送剩余数据块,等待ACK响应
发送:包头(2B)+包长度(2B)+传输类型(2B)+GPD包号(2B)+数据净荷(512B)+校验和(1B)+包尾(2B)
数据:Oxaa、0xf0、0x0b、0x02、0X066、0x02、0X01、0X00、…….、(chk)、0x0d、0a
(GPD file 分成512字节的数据块进行传输,最后一个小于512字节的块用0补齐)
接收:包头(2B)+包长度(2B)+ACK类型(2B)+GPD包号(2B)+有效标志(1B)+校验和(1B)+包尾(2B)
数据:Oxaa、0xf0、0x0c、0x00、0x03、0X00、0x01、0x00、0X01、(chk)、0x0d、0x0a
8.7.4 发送GPD传输结束语句并等待响应
发送:包头(2B)+包长度(2B)+传输类型(2B)+GPD终止符(2B)+校验和(1B)+包尾(2B)
数据:Oxaa、0xf0、0x0b、0x00、0X066、0x02、OXfF、OxfE、(chk)、0x0d、Oa
接收:包头(2B)+包长度(2B)+ACK类型(2B)+GPD终止符(2B)+有效标志(1B)+校验和(1B)+包尾(2B)
数据:Oxaa、0xf0、0x0c、0x00、0x03、0x00、Oxff、Oxff、0x01、(chk)、0x0d、0x0a
8.7.5 将 BINARY 接收切换为 NMEA 接收模式
发送:包头(2B)+包长度(2B)+报文类型(2B)+传输类型(1B)+波特率(4B)+校验和(1B)+包尾(2B)
数据:Oxaa、0xf0、0x0e、0X00、0x95、0X00、0X00、000、0xc2、0x01、0x00、(chk)、0x0d、0x0a
接收:包头(2B)+包长度(2B)+ACK类型(2B)+消息类型(2B)+有效标志(1B)+校验和(1B)+包尾(2B)
数据:Oxaa、0xf0、0x0c、0x00、0x01、0X00、0x95、0x00、0X03、(chk)、0x0d、0x0a
(状态标志:0表示无效,1表示不支持,2表示失败,3表示成功)
常问问题
9.1 通讯范围太短
- 如果有障碍物,通讯距离将受到影响。
- 数据丢失率会受到温度、湿度和同频干扰的影响。
- 地面会吸收和反射无线电波,因此在靠近地面测试时性能会很差。
- 海水对于无线电波的吸收能力很强,因此在海边测试时性能会很差。
- 当天线靠近金属物体或者放在金属盒子里时,信号会受到影响。
- 功率寄存器设置不正确,空中速率设置过高(空中速率越高,距离越短)。
- 电源低压tag室温下电压低于2.5V时,电压越低tage、发射功率越低。
- 由于天线质量或者天线与模块匹配不好。
9.2 模块容易损坏
- 请检查供电电源,确保其在正确的范围内。 体积tage 高于最大值会损坏模块。
- 请检查电源稳定性、电压tage不能波动太大。
- 安装和使用时请务必采取防静电措施,高频设备具有静电敏感性。
- 请确保湿度在有限的范围内,有些部件对湿度敏感。
- 请避免在温度过高或过低的环境下使用模块。
9.3 BER(误码率)高
- 附近有同频信号干扰,请远离干扰源或者修改频率、频道避开干扰;
- 电源供电不良可能造成乱码,请确保电源供电可靠。
- 延长线、馈线质量差或太长,造成误码率较高;
焊接指导
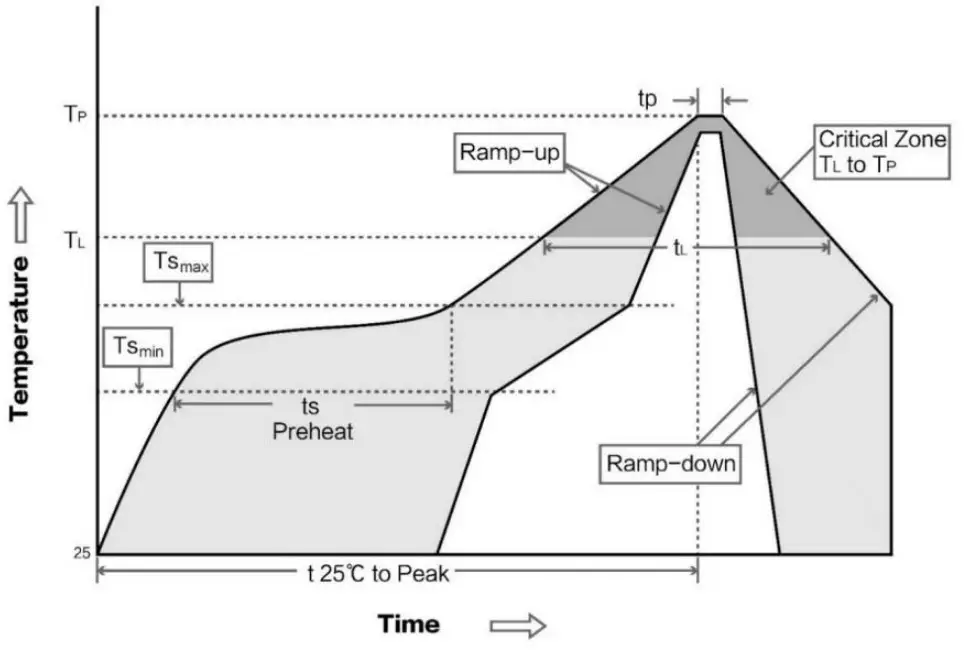
10.1回流焊温度
| 专业版file 特征 | 锡铅组装 | 无铅组装 |
| 焊锡膏 | 锡63 /铅37 | Sn96.5/Ag3/Cu0.5 |
| 预热温度最小值(Tsmin) | 100°C | 150°C |
| 最大预热温度(Tsmax) | 150°C | 200°C |
| 预热时间(Tsmin to Tsmax)(ts) | 60-120秒 | 60-120秒 |
| 平均ramp-上升率(TsmaxtoTp) | 最大 3°C/秒 | 最大 3°C/秒 |
| 液化温度(TL) | 183°C | 217°C |
| 时间(tL)MaintainedAbove(TL) | 60-90秒 | 30-90秒 |
| 峰值温度(Tp) | 220-235℃ | 230-250℃ |
| 平均ramp-下降率(TptoTsmax) | 最大 6°C/秒 | 最长 60 秒 |
| 时间 25° 至峰值温度 25°C | 最多 6 分钟 | 最多 8 分钟 |
10.2 回流焊曲线
E108 系列
| 型号。 | 芯片组 | 卫星 | 包裹 | 尺寸 毫米 | 界面 |
| E108-GN02 | GK9501 | 北斗/GPS/格洛纳斯 | 贴片 | 16*12%2.4 | 串口/GPIO |
| E108-GN02D | GK9501 | 北斗/GPS/格洛纳斯 | 贴片 | 10.1%9.7%2.4 | 串口/GPIO |
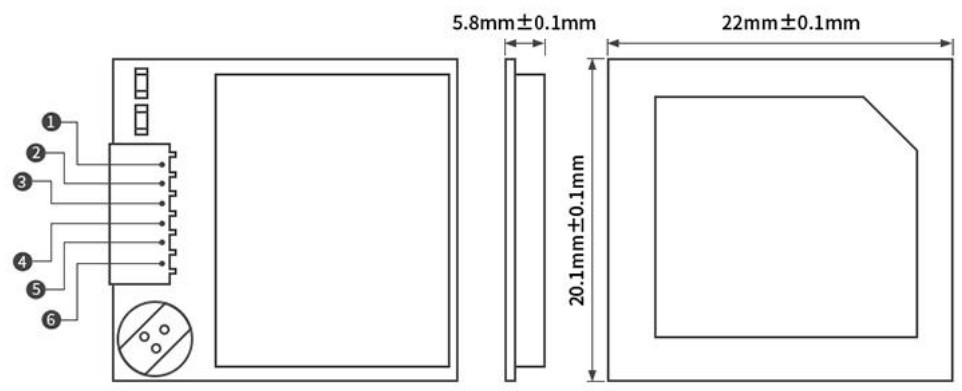
| E108-GNO1 | GK9501 | 北斗/GPS/格洛纳斯 | 蘸 | 22%20%5.8 | 通用异步收发器 |
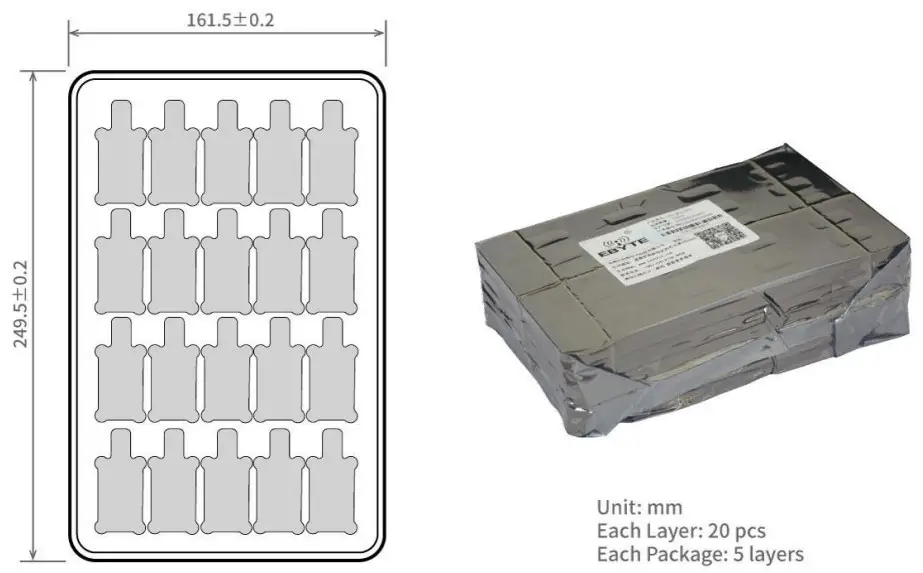
批量订单包装
修订历史
| 版本 | 日期 | 评论 | by |
| v1.0 | 2020-08-28 | 原始版本 | —_— |
| 六.1 | 2022-6-22 | 修改版 | 严 |
关于我们
技术支持:support@cdebyte.com
文档和RF设置下载链接: 易字节网
感谢您使用亿比特产品!如有任何问题或建议,请联系我们: info@cdebyte.com
电话: +86 028-61399028
'Web: www.cdebyte.com
地址:四川省高新区西曲大道5号B199模具园
![]() 成都亿佰特电子科技有限公司
成都亿佰特电子科技有限公司
版权所有 ©2012-2022,
文件/资源
 |
EBYTE E108-GN系列多模卫星定位导航模块 [pdf] 用户手册 E108-GN、E108-GN系列多模卫星定位导航模块、多模卫星定位导航模块、卫星定位导航模块、定位导航模块、导航模块 |