![]() ระบบอัตโนมัติ GT200-MT-CO Modbus TCP Canopen Gateway
ระบบอัตโนมัติ GT200-MT-CO Modbus TCP Canopen Gateway
คู่มือการใช้งาน
ข้อมูลที่สำคัญ
คำเตือน
ข้อมูลและอดีตampไฟล์ในคู่มือนี้ไม่สามารถคัดลอกได้หากไม่ได้รับอนุญาต SST Automation ขอสงวนสิทธิ์ในการอัพเกรดผลิตภัณฑ์โดยไม่ต้องแจ้งให้ผู้ใช้ทราบ
ผลิตภัณฑ์มีการใช้งานมากมาย ผู้ใช้จะต้องตรวจสอบให้แน่ใจว่าการดำเนินการและผลลัพธ์ทั้งหมดเป็นไปตามความปลอดภัยของสาขาที่เกี่ยวข้อง และความปลอดภัยรวมถึงกฎหมาย กฎเกณฑ์ รหัสและมาตรฐาน
ลิขสิทธิ์
ลิขสิทธิ์ © 2023 โดย SST Automation Co., Ltd. สงวนลิขสิทธิ์
เครื่องหมายการค้า
![]() เป็นเครื่องหมายการค้าจดทะเบียนของ SST Automation
เป็นเครื่องหมายการค้าจดทะเบียนของ SST Automation
ข้อมูลติดต่อฝ่ายสนับสนุนด้านเทคนิค www.sstautomation.com
www.sstcomm.com อีเมล: support@sstautomation.com
สินค้าเกินview
1.1 ฟังก์ชั่นผลิตภัณฑ์
เกตเวย์รองรับการเชื่อมต่ออุปกรณ์ CANopen กับเครือข่าย Modbus TCP โดยสามารถรับรู้การสื่อสารข้อมูลระหว่างอุปกรณ์ CANopen หลายตัวและไคลเอนต์ Modbus TCP หลายตัว
1.2 คุณลักษณะของผลิตภัณฑ์
- รองรับหนึ่งช่อง CAN 2.0A.
- อินเทอร์เฟซ CAN: การแยกตาแมว 3KV
- ทำหน้าที่เป็น CAN open Master รองรับคำสั่ง PDO 100 รายการและ SDO 100 รายการ
- รองรับไคลเอนต์ Modbus TCP สูงสุด 8 ตัว
- รองรับ 2 ช่องสัญญาณ พอร์ตเครือข่าย 10M/100M..
1.3 ข้อมูลจำเพาะทางเทคนิค
[1] อินเทอร์เฟซอีเทอร์เน็ต:
- รองรับพอร์ตเครือข่าย 2M/10M (เจรจาอัตโนมัติ) 100 พอร์ตพร้อมสวิตช์ในตัว
- รองรับโปรโตคอล Modbus TCP และทำหน้าที่เป็นเซิร์ฟเวอร์ Modbus TCP
- รองรับการเชื่อมต่อไคลเอนต์ Modbus TCP สูงสุด 8 ตัว
- รองรับรหัสฟังก์ชัน: 03H, 04H, 06H, 10H.
- ที่อยู่เริ่มต้นของอินพุตรีจิสเตอร์คือ 0 (จัดเก็บเฟรม CAN ที่ได้รับ) และรองรับโค้ดฟังก์ชัน 04H
- ที่อยู่เริ่มต้นของเอาท์พุตรีจิสเตอร์คือ 0 (จัดเก็บเฟรม CAN ที่ต้องส่ง) และรองรับโค้ดฟังก์ชัน 03H, 06H และ 16H
- รองรับรหัสฟังก์ชัน 03 หรือ 04 เพื่ออ่านพื้นที่ข้อมูลอินพุต/เอาต์พุต
- รองรับการกำหนดค่าคงที่ของที่อยู่ IP และ DHCP
[2] อัตราการสื่อสาร: อัตราบอด CAN: 10kbit/s, 20kbit/s, 50kbit/s, 100kbit/s, 125kbit/s, 250kbit/s, 500kbit/s, 1Mbps
[3] อินเทอร์เฟซ CAN รองรับโปรโตคอล CAN2.0A
[4] เป็นไปตามข้อกำหนด DS-301 V4.02 และ CiA Draft Recommendation 303 - รองรับ TPDO และ RPDO สูงสุด 8 ไบต์
- รองรับคำสั่ง PDO สูงสุด 100 คำสั่ง และคำสั่ง SDO สูงสุด 100 คำสั่ง
- รองรับการดาวน์โหลด SDO ที่รวดเร็วและอัพโหลด SDO ที่รวดเร็ว
- ผู้ใช้สามารถตั้งค่า COB-ID ของ TPDO และ RPDO หรือใช้ COBID เริ่มต้นได้
- รองรับ Clear Data Time สำหรับฟังก์ชัน TPDO
- รองรับฟังก์ชันหมดเวลาตอบสนอง SDO
- รองรับการจัดการ NMT
- รองรับฟังก์ชั่นซิงค์
- รองรับฟังก์ชั่น Guard life (โปรโตคอล Life-guarding และ Heartbeat)
- รองรับฟังก์ชันการส่งวงจร RPDO
- รองรับการหน่วงเวลาหลัก CANopen เพื่อเริ่มต้นฟังก์ชัน
- รองรับฟังก์ชั่นสถานะการควบคุม
- ฟังก์ชั่นที่กำหนดคำสั่ง NMT_RESET
[5] อุณหภูมิในการทำงาน: -40 °F~140 °F(-20 °C ถึง 60 °C) ความชื้นสัมพัทธ์: 5% ถึง 95% (ไม่ควบแน่น)
[6] พลังงาน: 24VDC (11V~30V), 80mA (24VDC)
[7] ขนาดภายนอก (กว้าง*สูง*ลึก): 1.0 นิ้ว*4.0 นิ้ว *3.6 นิ้ว (25 มม.*100 มม.*90 มม.)
[8] การติดตั้ง: ราง DIN 1.38 นิ้ว (35 มม.)
[9] ระดับการป้องกัน: IP20
1.4 สินค้าที่เกี่ยวข้อง
สินค้าที่เกี่ยวข้องได้แก่:
- GT100-CO-RS
- GT200-CO-RS
- GT200-EI-CO
- GT200-PN-CO
- GT200-DP-CO
หากต้องการข้อมูลเพิ่มเติมเกี่ยวกับผลิตภัณฑ์ที่เกี่ยวข้อง โปรดไปที่ SST Automation ของเรา webเว็บไซต์: www.sstautomation.com
1.5 ประวัติการแก้ไข
| การแก้ไข | วันที่ | บท | คำอธิบาย |
| วี3.0 | 02/27/2022 | ทั้งหมด | ออกใหม่ |
คำอธิบายฮาร์ดแวร์
 หมายเหตุ: ภาพนี้ใช้สำหรับการอ้างอิงเท่านั้น ลักษณะของผลิตภัณฑ์ขึ้นอยู่กับผลิตภัณฑ์จริง
หมายเหตุ: ภาพนี้ใช้สำหรับการอ้างอิงเท่านั้น ลักษณะของผลิตภัณฑ์ขึ้นอยู่กับผลิตภัณฑ์จริง
2.2 ไฟแสดงสถานะ LED
| นำ | สถานะ | คำอธิบายสถานะ |
| เป็น | เปิดสีเขียว | สร้างการเชื่อมต่อ Modbus TCP แล้ว |
| สีเขียวกะพริบ | ไม่ได้สร้างการเชื่อมต่อ Modbus TCP | |
| สีแดงกะพริบ | หมดเวลาการเชื่อมต่อ Modbus TCP | |
| สีส้มกะพริบ (กะพริบสลับกับ CNS) | สถานะการกำหนดค่า | |
| สีส้มกะพริบ | สถานะเริ่มต้น | |
| ( นส | แดงออน | ปิดรถบัส |
| ไฟแดงติดเป็นระยะๆ | ตัวนับข้อผิดพลาดของคอนโทรลเลอร์ CAN ถึงหรือเกินค่าป้องกัน (มีกรอบข้อผิดพลาดมากเกินไป) | |
| เปิดสีเขียว | โหนดอยู่ในโหมดการทำงาน | |
| สีส้มกะพริบหนึ่งครั้งแล้วดับ | สถานะเริ่มต้น | |
| สีส้มกะพริบ (กะพริบสลับกับ ENS) | สถานะการกำหนดค่า | |
| ส้มออน | การจัดการเอ็นเอ็มที กำลังรอ BOOTP ของทาสทั้งหมด (ใช้เมื่อเปิดใช้งาน NMT) |
2.3 สวิตช์/ปุ่มการกำหนดค่า
สวิตช์ DIP ใช้สำหรับตั้งค่าโหมดการทำงานของอุปกรณ์![]()
| ฟังก์ชั่น (บิต 1) | โหมด (บิต 2) | คำอธิบาย |
| ที่สงวนไว้ | บ่อยครั้ง | โหมดการทำงานห้ามไม่ให้อ่านและเขียนข้อมูลการกำหนดค่า |
| ปิด | On | โหมดการกำหนดค่าที่มีที่อยู่ IP คงที่ 192.168.0.10 สามารถทำได้เท่านั้น อ่านและเขียนข้อมูลการกำหนดค่า |
| on | On | โหมด BootLoader พร้อมที่อยู่ IP คงที่ 192.168.0.10 |
หมายเหตุ: รีสตาร์ท GT200-MT-CO หลังจากรีเซ็ตการกำหนดค่าเพื่อให้การกำหนดค่ามีผล!
2.4 อินเทอร์เฟซ
2.4.1 อินเทอร์เฟซพลังงาน
| เข็มหมุด | การทำงาน |
| 1 | กราวด์ไฟฟ้า (24V DC-) |
| 2 | NC(ไม่ได้เชื่อมต่อ) |
| 3 | +24โวลต์กระแสตรง |
2.4.2 อินเทอร์เฟซอีเทอร์เน็ต อินเทอร์เฟซอีเธอร์เน็ตใช้อินเทอร์เฟซ RJ45 เป็นไปตามมาตรฐาน IEEE802.3u 100BASE-T พร้อมการเจรจาอัตโนมัติ 10/100M pinout (สัญญาณอีเธอร์เน็ตมาตรฐาน) ถูกกำหนดไว้ด้านล่าง:
อินเทอร์เฟซอีเธอร์เน็ตใช้อินเทอร์เฟซ RJ45 เป็นไปตามมาตรฐาน IEEE802.3u 100BASE-T พร้อมการเจรจาอัตโนมัติ 10/100M pinout (สัญญาณอีเธอร์เน็ตมาตรฐาน) ถูกกำหนดไว้ด้านล่าง:
| เข็มหมุด | คำอธิบายสัญญาณ |
| 1 | TXD+, ข้อมูล Tranceive+, เอาท์พุต |
| 2 | TXD-, ข้อมูล Tranceive-, เอาท์พุต |
| 3 | RXD+, รับข้อมูล+, อินพุต |
| 6 | RXD-, รับข้อมูล-, อินพุต |
| 4,5,7,8 | (ที่สงวนไว้) |
 เกตเวย์ใช้ตัวเชื่อมต่อสามพินแบบเปิดที่ด้านข้างของ CAN:
เกตเวย์ใช้ตัวเชื่อมต่อสามพินแบบเปิดที่ด้านข้างของ CAN:| เข็มหมุด | การเชื่อมต่อ |
| 1 | แคน-แอล |
| 2 | โล่ (ไม่จำเป็น) |
| 3 | สามารถ-H |
เทอร์มินัล CAN มีสวิตช์ตัวต้านทานเทอร์มินัล 120Ω ; เมื่อสวิตช์เปิดอยู่ ความต้านทานของเทอร์มินัลจะเชื่อมต่ออยู่ เมื่อปิดสวิตช์ ความต้านทานของขั้วต่อจะถูกตัดการเชื่อมต่อ
ขนาด (กว้าง * สูง * ลึก): 1.0 นิ้ว * 4.0 นิ้ว * 3.6 นิ้ว (25 มม. * 100 มม. * 90 มม.)
 2.6 วิธีการติดตั้ง
2.6 วิธีการติดตั้งใช้ราง DIN 1.4 นิ้ว (35 มม.)

คู่มือเริ่มต้นอย่างรวดเร็ว
- ตรวจสอบให้แน่ใจว่า GT200-MT-CO อยู่ในโหมดการทำงานที่เหมาะสมที่อนุญาตให้กำหนดค่าได้ ขอแนะนำให้ตั้งค่าเกตเวย์เป็นโหมดการกำหนดค่า (การกำหนดค่าสวิตช์ปิดบิต 1 และเปิดบิต 2) จากนั้น IP ของเกตเวย์จะได้รับการแก้ไขที่ 192.168.0.10
- ใช้สายอีเทอร์เน็ตเพื่อเชื่อมต่อ GT200-MT-CO กับพีซี
- เชื่อมต่ออุปกรณ์ CAN โดยการต่อพิน 1 และ 3 เป็นอย่างน้อย
- เชื่อมต่อแหล่งจ่ายไฟ จากนั้นเปิดอุปกรณ์
- เรียกใช้ซอฟต์แวร์ SST-MTC-CFG เพื่อเริ่มกระบวนการกำหนดค่า
- ในซอฟต์แวร์กำหนดค่า ให้ตั้งค่าอัตรารับส่งข้อมูล CAN, ID โหนด และที่อยู่ IP (ดูรายละเอียดในบทที่ 4.5 และ 4.7.4)
- หลังจากกำหนดค่าเกตเวย์แล้ว ให้ตั้งค่าสวิตช์ DIP การกำหนดค่าบิต 2 เป็นปิด เปิดเครื่องอีกครั้งและโมดูลจะเข้าสู่โหมดการทำงาน
ผู้ใช้สามารถเชื่อมต่อเกตเวย์กับพีซีผ่านพอร์ต RJ-45 ผู้ใช้สามารถใช้ SST-MTC-CFG เพื่อกำหนดค่า GT200-MT-CO ให้เสร็จสิ้นได้อย่างง่ายดาย รวมถึงที่อยู่ IP อัตรารับส่งข้อมูลของพอร์ต CANopen และคำสั่ง CANopen
มีสองวิธีในการตั้งค่าที่อยู่ IP: กำหนดด้วยตนเองและ DHCP กำหนดด้วยตนเองหมายความว่าผู้ใช้ตั้งค่า IP ด้วยตนเองในสถานะการกำหนดค่า เมื่อผู้ใช้เลือกใช้ DHCP ผู้ใช้ต้องใช้เราเตอร์อีเธอร์เน็ต (เกตเวย์ ฮับ สวิตช์) เพื่อจัดสรร IP ในสถานะกำลังทำงาน
3.3.1 โหมดการแลกเปลี่ยนข้อมูล
โหมดการสื่อสารระหว่าง CAN open และ Ethernet/IP เป็นโหมดอะซิงโครนัส ดังที่แสดงด้านล่าง:
 “ข้อมูล 1” แสดงกระบวนการถ่ายโอนข้อมูลจาก Modbus TCP ไปยัง CAN “ข้อมูล 2” แสดงกระบวนการถ่ายโอนข้อมูลจาก CAN ไปยัง Modbus TCP
“ข้อมูล 1” แสดงกระบวนการถ่ายโอนข้อมูลจาก Modbus TCP ไปยัง CAN “ข้อมูล 2” แสดงกระบวนการถ่ายโอนข้อมูลจาก CAN ไปยัง Modbus TCPเอาต์พุต Modbus TCP I/O สามารถส่งข้อมูล 0 ไปยังหลายเฟรม CAN ได้ หลังจากที่เกตเวย์ได้รับเกตเวย์ จะส่งเฟรมเปิด CAN จากนั้นแพ็คเฟรมตอบกลับ CANopen ที่ได้รับลงในอินพุต I/O และส่งไปยัง Modbus TCP Clinet TPDO และ RPDO ใช้โหมดผู้ผลิต/ผู้บริโภค และมักจะใช้ในโอกาสที่มีความต้องการความเร็วสูง อัปโหลด SDO และดาวน์โหลด SDO จะใช้โหมดไคลเอนต์/เซิร์ฟเวอร์ โหมดนี้สามารถรับประกันความปลอดภัยของข้อมูล และมักใช้ในบางโอกาสที่มีความต้องการความเร็วต่ำ
GT200-MT-CO รองรับฟังก์ชัน NMT แบบธรรมดา: รองรับการเริ่มต้นฟังก์ชันทาสแบบเปิด CAN ทั้งหมดอย่างง่ายดาย GT200-MT-CO รองรับฟังก์ชัน Guard life และฟังก์ชัน SYNC
คำแนะนำซอฟต์แวร์
ดับเบิลคลิกไอคอนซอฟต์แวร์บนเดสก์ท็อปหลังการติดตั้งเพื่อเข้าสู่อินเทอร์เฟซการกำหนดค่า:
 4.1 แถบเครื่องมือ
4.1 แถบเครื่องมือแถบเครื่องมือจะแสดงดังต่อไปนี้:
 ฟังก์ชั่นของแถบเครื่องมือ: ใหม่ บันทึก เปิด เพิ่มโหนด ลบโหนด เพิ่มคำสั่ง ลบคำสั่ง อัปโหลด ดาวน์โหลด แผนที่อัตโนมัติ ข้อขัดแย้ง และส่งออก EXCEL
ฟังก์ชั่นของแถบเครื่องมือ: ใหม่ บันทึก เปิด เพิ่มโหนด ลบโหนด เพิ่มคำสั่ง ลบคำสั่ง อัปโหลด ดาวน์โหลด แผนที่อัตโนมัติ ข้อขัดแย้ง และส่งออก EXCEL| ใหม่: สร้างโครงการการกำหนดค่าใหม่ | |
| บันทึก: บันทึกการกำหนดค่าปัจจุบัน | |
| เปิด: เปิดโปรเจ็กต์การกำหนดค่า | |
| เพิ่มโหนด: เพิ่มโหนด CANopen | |
| ลบโหนด: ลบโหนด CANopen | |
| เพิ่มคำสั่ง: เพิ่มคำสั่ง CANopen | |
| ลบคำสั่ง: ลบคำสั่ง CANopen | |
| อัปโหลด: อ่านข้อมูลการกำหนดค่าจากโมดูลและแสดงในซอฟต์แวร์ | |
| ดาวน์โหลด: ดาวน์โหลดการกำหนดค่า file ไปที่เกตเวย์ | |
| แผนที่อัตโนมัติ: ใช้เพื่อคำนวณที่อยู่หน่วยความจำที่แมปโดยอัตโนมัติโดยไม่มีความขัดแย้งในแต่ละคำสั่ง | |
| Confilct: เพื่อตรวจสอบว่ามีข้อขัดแย้งกับคำสั่งที่กำหนดค่าไว้ในบัฟเฟอร์ข้อมูลหน่วยความจำเกตเวย์หรือไม่ | |
| ส่งออก EXCEL: ส่งออกการกำหนดค่าปัจจุบันไปยังฮาร์ดดิสก์ในเครื่อง บันทึกเป็น .xls file. | |
| แก้ไขข้อบกพร่อง: สงวนไว้ |
พารามิเตอร์ที่เริ่มต้นใหม่เพื่อเปิดอินเทอร์เฟซการกำหนดค่า:
บันทึก: ฟังก์ชันใหม่ส่วนใหญ่จะใช้สำหรับการกำหนดค่าออฟไลน์ กล่าวคือ คุณสามารถใช้พารามิเตอร์การเริ่มต้นเพื่อเปิดอินเทอร์เฟซการกำหนดค่าเมื่อไม่มีอุปกรณ์
 4.3 เปิดและบันทึกการกำหนดค่า
4.3 เปิดและบันทึกการกำหนดค่าเลือก "เปิด" คุณสามารถเปิดโครงการกำหนดค่าที่คุณบันทึกไว้ได้
 เลือก "บันทึก" หรือ "บันทึกเป็น" คุณสามารถบันทึกโครงการกำหนดค่าโดยใช้ .chg เป็นส่วนขยายได้
เลือก "บันทึก" หรือ "บันทึกเป็น" คุณสามารถบันทึกโครงการกำหนดค่าโดยใช้ .chg เป็นส่วนขยายได้ คลิกไอคอน
คลิกไอคอน หมายเหตุ: หลังจากบันทึกพารามิเตอร์เป็น fileข้อมูลใน file ผู้ใช้สามารถเปลี่ยนแปลงได้ แต่โปรดตรวจสอบความถูกต้องของข้อมูลที่เปลี่ยนแปลง ไม่เช่นนั้นข้อมูลที่ไม่ถูกต้องจะถูกประมวลผลตามค่าเริ่มต้น
หมายเหตุ: หลังจากบันทึกพารามิเตอร์เป็น fileข้อมูลใน file ผู้ใช้สามารถเปลี่ยนแปลงได้ แต่โปรดตรวจสอบความถูกต้องของข้อมูลที่เปลี่ยนแปลง ไม่เช่นนั้นข้อมูลที่ไม่ถูกต้องจะถูกประมวลผลตามค่าเริ่มต้นกรุณาอย่าเปลี่ยนคำสำคัญของข้อมูล กรุณาอย่าเพิ่มช่องว่าง
เลือก “อัปโหลด” มันจะอ่านการกำหนดค่าจากเกตเวย์ และอินเทอร์เฟซจะแสดงดังต่อไปนี้:
 เลือกอุปกรณ์ คลิกลงชื่อเข้าใช้
เลือกอุปกรณ์ คลิกลงชื่อเข้าใช้ คลิกอัพโหลด
คลิกอัพโหลด เลือก “อัปโหลด” มันจะอ่านการกำหนดค่าที่ใช้จากเกตเวย์ และอินเทอร์เฟซจะแสดงดังต่อไปนี้:
เลือก “อัปโหลด” มันจะอ่านการกำหนดค่าที่ใช้จากเกตเวย์ และอินเทอร์เฟซจะแสดงดังต่อไปนี้: เลือก "ดาวน์โหลด" มันจะดาวน์โหลดการกำหนดค่าไปยังเกตเวย์ และอินเทอร์เฟซจะแสดงเป็น ด้านล่าง:
เลือก "ดาวน์โหลด" มันจะดาวน์โหลดการกำหนดค่าไปยังเกตเวย์ และอินเทอร์เฟซจะแสดงเป็น ด้านล่าง: บันทึก: ที่อยู่ IP ได้รับการแก้ไขที่ 192.168.0.10 ในโหมดการกำหนดค่า GT200-MT-CO
บันทึก: ที่อยู่ IP ได้รับการแก้ไขที่ 192.168.0.10 ในโหมดการกำหนดค่า GT200-MT-COอินเทอร์เฟซการกำหนดค่า Modbus TCP แสดงไว้ด้านล่าง:
 ในพารามิเตอร์ข้างต้น ข้อมูลรายละเอียดจะแสดงดังต่อไปนี้:
ในพารามิเตอร์ข้างต้น ข้อมูลรายละเอียดจะแสดงดังต่อไปนี้:กำหนดโหมด IP: กำหนดด้วยตนเองและเป็นทางเลือก DHCP
ที่อยู่ IP: ที่อยู่ IP ของ GT200-MT-CO
ซับเน็ตมาสก์: ซับเน็ตมาสก์ของ GT200-MT-CO
เกตเวย์เริ่มต้น: ที่อยู่เกตเวย์ GT200-MT-CO อยู่ใน LAN
ตรวจสอบ ID ยูนิต: ตรวจสอบตัวระบุยูนิต: เปิดหรือปิด เมื่อคุณเปิด คุณสามารถตั้งค่าเกตเวย์เป็นที่อยู่สถานีของ Modbus TCP Server ได้
Unit ID:เกตเวย์เป็นที่อยู่สถานีของเซิร์ฟเวอร์ Modbus TCP รหัสหน่วยจะเปิดใช้งานเมื่อ "ตรวจสอบรหัสหน่วย" เปิดอยู่ ช่วง: 1 ถึง 247 ค่าเริ่มต้นคือ 1
รหัสฟังก์ชั่นสำหรับการอ่านข้อมูล: รหัสฟังก์ชั่น 04/03 อ่านข้อมูลอินพุต: Modbus TCP Client สามารถเลือกรหัสฟังก์ชั่น 04 หรือ 03 และอ่านข้อมูลอุปกรณ์ CANopen ที่รวบรวมผ่านเกตเวย์
4.6 สามารถเปิดพารามิเตอร์การกำหนดค่าได้
กำหนดค่าพารามิเตอร์เครือข่าย CANopen รวมถึง CAN open Baud Rate, สามารถเปิด Node ID, SDO Response Timeout, เปิดใช้งาน NMT, Clear Data Time สำหรับ TPDO, SYNC, Guard Life, The Cycle สำหรับ RPDO Transmission, 5Delay to Start up, ควบคุมและตรวจสอบสถานะ, เอาท์พุต การประมวลผลข้อมูล, วงจรสำหรับการส่ง SDO, การส่งคำสั่ง SDO ฝั่ง MT, ความพยายามสำหรับคำสั่ง SDO ล้มเหลว และความล่าช้าในการโพล SDO อินเทอร์เฟซการกำหนดค่า CANopen แสดงดังต่อไปนี้:
 4.7 อุปกรณ์ View อินเทอร์เฟซ
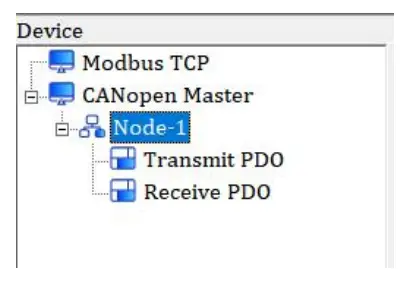
4.7 อุปกรณ์ View อินเทอร์เฟซ4.7.1 อุปกรณ์ View อินเทอร์เฟซ
 4.7.2 โหมดการทำงาน
4.7.2 โหมดการทำงานรองรับโหมดการทำงานสามประเภท: เมนูแก้ไข, แก้ไขแถบเครื่องมือ และเมนูแก้ไขด้วยการคลิกขวา
 4.7.3 ประเภทการดำเนินงาน
4.7.3 ประเภทการดำเนินงาน- เพิ่มโหนด: คลิกซ้ายบน CANopen Networks หรือโหนดที่มีอยู่ จากนั้นดำเนินการเพิ่มโหนดใหม่ จากนั้นจะมีโหนดใหม่ชื่อ “โหนดใหม่” ภายใต้ CANopen Network (โหนดที่เพิ่มใหม่ไม่มีที่อยู่ โหนดที่ไม่มีที่อยู่ไม่ถูกต้อง โปรดป้อนที่อยู่ของโหนด ที่อยู่ของโหนดไม่สามารถทำซ้ำได้)
- ลบโหนด: คลิกซ้ายบนโหนดที่ต้องการลบ จากนั้นดำเนินการลบโหนด โหนดและคำสั่งทั้งหมดจะถูกลบ Ø เพิ่มคำสั่ง: คลิกซ้ายบนโหนด จากนั้นดำเนินการเพิ่มคำสั่งเพื่อเพิ่มคำสั่งสำหรับโหนด กล่องโต้ตอบการเลือกคำสั่งจะปรากฏขึ้นเพื่อให้ผู้ใช้เลือก แสดงดังต่อไปนี้:
คำสั่ง: อัปโหลด SDO-> ENet In, ดาวน์โหลด SDO <- ENet Out, ส่ง PDO-> ENet In, รับ PDO <- ENet Out - เลือกคำสั่ง: คลิกสองครั้งที่คำสั่ง

- ลบคำสั่ง: คลิกซ้ายที่คำสั่งแล้วคุณสามารถลบได้
- คัดลอกโหนด: คลิกซ้ายบนโหนดที่มีอยู่ เลือกโหนดและดำเนินการคัดลอกโหนด (รวมคำสั่งทั้งหมดไว้ใต้โหนด)
- วางโหนด: คลิกซ้ายและเลือกโหนดที่มีอยู่ ดำเนินการวางโหนด จากนั้นภายใต้แผนผังเครือข่าย CANopen คุณจะเห็นโหนดใหม่ (รวมคำสั่งทั้งหมดไว้ใต้โหนด) พารามิเตอร์ของโหนดใหม่เป็นการตั้งค่าเริ่มต้น จำเป็นต้องรีเซ็ต
พารามิเตอร์ที่กำหนดค่าได้จะแสดงดังต่อไปนี้:
สามารถเปิด Baud Rate, สามารถเปิด Node ID, SDO Response Timeout, เปิดใช้งาน NMT, NMT_RESET, ล้างข้อมูลเวลาสำหรับ TPDO, SYNC, Guard Life, The Cycle สำหรับ RPDO Transmission, Delay to Start up, ควบคุมและตรวจสอบสถานะ, การประมวลผลข้อมูลเอาต์พุต, วงจรสำหรับการส่ง SDO ความพยายามสำหรับคำสั่ง SDO ล้มเหลว และเวลาหน่วงการโพล SDO
อินเทอร์เฟซการกำหนดค่าแบบเปิดสามารถแสดงได้ดังนี้:
 สามารถเปิด Baud Rate: 50K, 100K, 125K, 250K, 500K, 1M สามารถเลือกได้; ค่าเริ่มต้นคือ 250K
สามารถเปิด Baud Rate: 50K, 100K, 125K, 250K, 500K, 1M สามารถเลือกได้; ค่าเริ่มต้นคือ 250Kรหัสโหนดเรือแคนู: 1 ถึง 127 ค่าเริ่มต้นคือ 127
หมดเวลาตอบสนอง SDO: พารามิเตอร์นี้อิงจาก 10 มิลลิวินาที ช่วงของค่าพารามิเตอร์คือ 1 ถึง 200 ค่าเริ่มต้นคือ 200
เปิดใช้งาน NMT: ไม่ว่าจะเริ่มต้นโหนดที่เปิด CAN ทั้งหมดบนเครือข่ายหรือไม่ก็ตาม ค่าเริ่มต้นคือปิดใช้งาน
0: อย่าใช้ฟังก์ชัน;
ค่าที่ไม่ใช่ศูนย์: ใช้ฟังก์ชันหมดเวลาและค่าหมดเวลาจะเป็นผลคูณอินทิกรัลที่ไม่ใช่ศูนย์ของ 10 มิลลิวินาที ช่วงคือ 0 ถึง 200 ค่าเริ่มต้นคือ 0
SYNC: รอบการซิงโครไนซ์
0: อย่าใช้ฟังก์ชันวงจรการซิงโครไนซ์
ค่าที่ไม่ใช่ศูนย์: ใช้ฟังก์ชัน และวงจรการซิงโครไนซ์จะเป็นค่าทวีคูณอินทิกรัลที่ไม่ใช่ศูนย์ของ 1 มิลลิวินาที ช่วงคือ 0 ถึง 6000 ค่าเริ่มต้นคือ 0
วงจรสำหรับการส่ง RPDO: วงจรสำหรับการส่ง RPDO จะขึ้นอยู่กับ 1ms ศูนย์หมายถึงการใช้โหมดการเปลี่ยนแปลงของค่าเอาต์พุต ไม่ใช่ศูนย์หมายถึงส่ง RPDO ทั้งหมดตามรอบ รอบการส่งเท่ากับค่าที่ตั้งไว้ ค่าเริ่มต้นคือ 0 ช่วง: 0 ~ 60000 หมายเหตุ: พารามิเตอร์นี้และอัตรารับส่งข้อมูล CAN เกี่ยวข้องกับหมายเลขคำสั่ง RPDO หากระบบมุ่งเน้นไปที่ประสิทธิภาพแบบเรียลไทม์ ขอแนะนำให้ตั้งค่านี้เป็น 0 ซึ่งก็คือการเปลี่ยนแปลงของเอาต์พุตค่า
ความล่าช้าในการเริ่มต้น: ค่าความล่าช้า
0: อย่าใช้ฟังก์ชัน;
ค่าที่ไม่ใช่ศูนย์: ใช้ฟังก์ชัน และค่าดีเลย์คือผลคูณอินทิกรัลที่ไม่ใช่ศูนย์ของ 1 มิลลิวินาที โดยมีช่วงคือ
0 ถึง 60000 ค่าเริ่มต้นคือ 0
สถานะการควบคุมและตรวจสอบ: บัฟเฟอร์เอาต์พุตสองไบต์แรกถูกใช้เป็นไบต์สถานะของทาส CANopen ไบต์แรกของสองไบต์นี้คือที่อยู่ของ CANopen salve และไบต์ที่สองคือคำสั่งที่ควบคุมทาส CANopen (เช่น ป้อนสถานะก่อนการดำเนินการ ป้อนสถานะการดำเนินการ ป้อนสถานะหยุด โหนดรีเซ็ต รีเซ็ตแอปพลิเคชัน รีเซ็ตการสื่อสาร ฯลฯ) การเลือก "เปิดใช้งาน" SST-ETC-CFG จะลบสองไบต์เมื่อคำนวณที่อยู่การแมปโดยอัตโนมัติ และสองไบต์นี้จะถูกบันทึกไว้ที่ด้านหน้าของบัฟเฟอร์ ค่าเริ่มต้นคือ "ปิดใช้งาน"
ล้างหมายถึงการตั้งค่าข้อมูลให้เป็นศูนย์
Hold หมายถึงการรักษาข้อมูลไม่ให้เปลี่ยนแปลงก่อนที่ TCP จะถูกปิด
วงจรการส่งข้อมูลแบบ SDO:วงจรการส่งข้อมูลแบบ SDO จะขึ้นอยู่กับ 1 มิลลิวินาที ศูนย์หมายถึงการดาวน์โหลด SDO ใช้โหมดการเปลี่ยนแปลงของค่าเอาต์พุต การอัปโหลด SDO ใช้โหมดการอ่านข้อมูลทาสที่ไม่หยุดนิ่ง ไม่ใช่ศูนย์หมายถึงส่ง SDO ทั้งหมดตามรอบ รอบการส่งเท่ากับค่าที่ตั้งไว้ ค่าเริ่มต้นคือ 0 ช่วง: 0 ถึง 60000
ความพยายามในการสั่ง SDO ล้มเหลว:สถานี CANopen Master ส่งคำขอ SDO แต่ไม่ได้รับการตอบกลับจากสถานีอุปกรณ์ สถานีหลักจะส่งคำขอ SDO นี้ซ้ำๆ จำนวนการซ้ำคือค่าที่กำหนดโดยพารามิเตอร์นี้ ช่วง: 0 ถึง 5 ค่าเริ่มต้น: 0
เวลาหน่วงการโพล SDO: สถานี CANopen Master จะส่งคำขอ SDO และรับการตอบกลับจากสถานีอุปกรณ์ สถานีหลักต้องชะลอระยะเวลาก่อนที่จะส่งคำขอ SDO ถัดไป ช่วงเวลานี้คือเวลาล่าช้าในการโพล SDO หน่วย: ms ช่วง: 0 ถึง 60000 ค่าเริ่มต้น: 0
4.7.5 การกำหนดค่าคำสั่ง
ในอินเทอร์เฟซของอุปกรณ์ คลิกซ้ายที่คำสั่ง จากนั้นอินเทอร์เฟซการกำหนดค่าจะแสดงดังต่อไปนี้:

- ที่อยู่อุปกรณ์ CANopen : ที่อยู่อุปกรณ์ CANopen ช่วงคือ 1 ถึง 127
- COB-ID: CAN ID (ทศนิยม) ของ CANopen PDO:
ค่าเริ่มต้นของคำสั่ง Transmit PDO: 384(0x180) + ID โหนดหรือ 640(0x280) + ID โหนดหรือ 896 (0x380) + ID โหนดหรือ 1152(0x480) + ID โหนด
ค่าเริ่มต้นของการรับ PDO: 512(0x200) + ID โหนดหรือ 768(0x300) + ID โหนดหรือ 1024 (0x400) + ID โหนดหรือ 1280 (0x500) + ID โหนด
หากผู้ใช้ต้องการกรอกค่าที่กำหนดเอง โปรดกรอกค่าที่ต้องการโดยตรงเมื่อเลือกรายการที่กำหนดเองในกล่องตัวเลือกแบบเลื่อนลง ช่วงคือ (1~127) & (257~1408) & (1664~1791) & (พ.ศ. 1920~2046) - จำนวนไบต์: จำนวนไบต์ข้อมูล ช่วง: 1~8
- ที่อยู่การแมป: ที่อยู่การแมปของที่อยู่หน่วยความจำภายในของเกตเวย์ (ทศนิยม) ช่วง: 0-1999 ที่อยู่การแมปสามารถกรอกด้วยตนเองหรือโดยอัตโนมัติโดยใช้ฟังก์ชันการแมปอัตโนมัติ
- คำอธิบาย: ผู้ใช้สามารถป้อนคำอธิบายเชิงพรรณนาของรายการการกำหนดค่าโครงการได้ที่นี่ ซึ่งจริงๆ แล้วสิ่งเหล่านี้ไม่ได้ดาวน์โหลดลงในอุปกรณ์เกตเวย์ ซึ่งสามารถช่วยให้ผู้ใช้แยกแยะฟังก์ชันของตนได้ เช่น "สถานะ" ฯลฯ และไม่สามารถใช้งานได้

- ค่าดัชนี:ค่าดัชนีในพจนานุกรมวัตถุของอุปกรณ์ (Hex, 0001H ถึง FFFFH)
- ค่าดัชนีย่อย:ค่าดัชนีย่อยในพจนานุกรมวัตถุของอุปกรณ์ (Hex, 00H ถึง FFH)
- จำนวนไบต์: จำนวนไบต์: ต้องเป็น 1 หรือ 2 หรือ 4
- ที่อยู่การแมป: ที่อยู่การแมปของที่อยู่หน่วยความจำภายในของเกตเวย์ (ทศนิยม) ช่วง: 0-1999 ที่อยู่การแมปสามารถกรอกด้วยตนเองหรือโดยอัตโนมัติโดยใช้ฟังก์ชันการแมปอัตโนมัติ
คำสั่ง SDO สูงสุด ≤ 100
อินเทอร์เฟซความคิดเห็นจะแสดงคำอธิบายของรายการการกำหนดค่าที่เกี่ยวข้อง เมื่อรายการกำหนดค่าเป็น “ดัชนี
ค่า” จะแสดงหน้าต่างแสดงความเห็นดังนี้:

เอกสาร / แหล่งข้อมูล
 |
SST Automation GT200-MT-CO Modbus TCP Canopen เกตเวย์ [พีดีเอฟ] คู่มือการใช้งาน GT200-MT-CO Modbus TCP Canopen เกตเวย์, GT200-MT-CO, Modbus TCP Canopen เกตเวย์, TCP Canopen เกตเวย์, เกตเวย์ |