ModBus පරිවර්තකය සඳහා HORNER R45C-2K-MQ IO-Link Master

උපාංග ලියාපදිංචි සිතියම
උපාංග රෙජිස්ටර් සිතියම Modbus (R2C-45K-MQ) සඳහා Compact 2-port IO-Link Master සහ Modbus සඳහා Compact 4-port IO-Link Master (R90C-4K-MQ) සඳහා සහය දක්වයි.
සහාය දක්වන කාර්ය කේත
| කාර්ය කේතය | නම | උපරිම පණිවිඩ ප්රමාණය |
| 3 (0x03) | හෝල්ඩින් රෙජිස්ටර් කියවන්න | බයිට් 250ක් |
| 6 (0x06) | තනි ලේඛනයක් ලියන්න | බයිට් 2ක් |
| 16 (0x10) | බහු රෙජිස්ටර් ලියන්න | බයිට් 246ක් |
| 23 (0x17) | රෙජිස්ටර් කියවන්න සහ ලියන්න | බයිට් 246ක් |
මොඩ්බස් වින්යාසය
පරිවර්තකයේ සන්නිවේදන සැකසුම් වෙනස් කිරීම සඳහා Modbus වින්යාසය භාවිතා වේ.
| ලියාපදිංචි කරයි | පරාමිතිය | ප්රවේශය | පෙරනිමිය |
| 40601 | බෝඩ් අනුපාතය: 9600 = 0 19200 = 1 38400 = 2 |
r/w | 19200 |
| 40602 | සමානාත්මතාවය: කිසිවක් නැත = 0 ඔත්තේ = 1 ඉරට්ටේ = 2 |
r/w | කිසිවක් නැත |
| 40603 | ලිපිනය | r/w | 1 |
| 40604 | වෙන් කර ඇත (කියවීමට හෝ ලිවිය නොහැක) | කිසිවක් නැත | — |
| 40605 | කර්මාන්තශාලා වින්යාසය ප්රතිසාධනය කරන්න: මෙහෙයුමක් නැත = 0 කර්මාන්ත ශාලාව ප්රතිෂ් ore ාපනය කරන්න වින්යාසය = 1 |
w/o | — |
හඳුනාගැනීමේ තොරතුරු
| ලියාපදිංචි කරන්න | පරාමිතිය | ප්රවේශය |
| 40001 | විකුණුම්කරු හැඳුනුම්පත | රොබෝ |
| 40002-40003 | ප්රධාන හැඳුනුම්පත | රොබෝ |
| 40004 | ප්රධාන වර්ගය (ගණනය කිරීම සඳහා IO-Link පිරිවිතර V1.1.3 වගුව 29 බලන්න) | රොබෝ |
| 40005 | විශේෂාංග_1: බිට් 0: Device Par Batch (SMI_ Param Write Batch) බිට් 1: DeviceParBatch (SMI_ Param Read Batch) බිට් 2: වරායේ බලය ක්රියා විරහිතයි (SMI_ Port Power Off ඔන්) |
රොබෝ |
| 40006 | සහාය දක්වන නාලිකා ගණන | රොබෝ |
| 40007-40014 | වරාය වර්ගය [n] 1 (ගණනය කිරීම් සඳහා IO-Link අතුරුමුහුණත් පිරිවිතර V2 වෙතින් E.1.1.3 - MasterI Dent වගුව බලන්න) | රොබෝ |
| 40015 | සම්පූර්ණ උපරිම බල සැපයුම (ඒකක 0.1 A) | රොබෝ |
| 40016-40023 | උපරිම බල සැපයුම (ඒකක 0.1 A) | රොබෝ |
| 40024 | සංශෝධනය | රොබෝ |
| 40025-40040 | විකුණුම්කරුගේ නම | රොබෝ |
| 40041-40056 | නිෂ්පාදන නම | රොබෝ |
| 40057-40088 | වෙළෙන්දා URL | රොබෝ |
| 40089-40120 | අත්පොත URL | රොබෝ |
| 40121-40122 | ස්ථිරාංග P/N | රොබෝ |
| 40123 | ස්ථිරාංග අනුවාදය | රොබෝ |
| 40124 | ස්ථිරාංග ගොඩනැගීමේ අංකය | රොබෝ |
| 40125-40140 | යෙදුම විශේෂිත Tag | r/w |
| 40141-40156 | කාර්යය Tag | r/w |
| 40157-40172 | ස්ථානය Tag | r/w |
බහු-වරාය සහාය
පහත දැක්වෙන සියලුම රෙජිස්ටර් සිතියම් තොට 1ට විශේෂිත වේ. බහු-පෝට් ඇඩැප්ටර සඳහා, එක් එක් වරායට හිමි රෙජිස්ටර් අවකාශය තුළ තමන්ගේම රෙජිස්ටර් පරාසයක් ලබා දේ.
| ලියාපදිංචි කරයි | වරාය |
| 41001-41999 | වරාය 1 |
| 42001-42999 | වරාය 2 |
| 43001-43999 | වරාය 3 |
| 44001-44999 | වරාය 4 |
| 45001-45999 | වරාය 5 |
| 46001-46999 | වරාය 6 |
| 47001-47999 | වරාය 7 |
| 48001-48999 | වරාය 8 |
දී ඇති ලේඛනයක් සඳහා, නව වරාය සඳහා ලියාපදිංචි ලිපිනය තීරණය කිරීම සඳහා වරායේ ආරම්භක ලිපිනය යෙදිය හැක. උදාහරණයක් ලෙසample, පෝට් 8 සඳහා ක්රියාවලි දත්ත ප්රතිදානයේ ලිපිනය සොයා ගන්නේ කෙසේද යන්න පහත ගණනය කිරීම පෙන්නුම් කරයි.
| සමාන වරාය 1 රෙජිස්ටර් | වරාය | වරාය ආරම්භක ලේඛනය | ඕෆ්සෙට් | නව ලේඛනය |
| 41051 | 1 | 41001 | 50 | 41051 |
| 41051 | 8 | 48001 | 50 | 48051 |
වරාය තත්ත්වය
සම්බන්ධිත උපාංගය සම්බන්ධ තොරතුරු පහත සඳහන් ලේඛන මගින් සපයනු ලැබේ. නව උපාංගයක් සම්බන්ධ වූ විට, සියලු දත්ත උපාංගයෙන් කියවීමට උත්සාහ කරයි. සහාය නොදක්වන විධාන හිස් තන්තුවක් ලෙස කියවනු ලැබේ.
රෙජිස්ටර් එන්ඩියානු හුවමාරුව තන්තු අගයන් මත සිදු නොවේ. දත්ත ගෙවීමේ බයිට් අනුපිළිවෙල උපාංගයේ බයිට් අනුපිළිවෙලට ගැලපේ. මෙම ලේඛනවලට ලිවීම දෝෂයකි.
| ලියාපදිංචි කරයි | පරාමිතිය | ප්රවේශය |
| 41501 | වරාය මාදිලිය | රොබෝ |
| 41502 | වරාය තත්ත්ව තොරතුරු: Bit0: Process Data in Valid Bit1: Process Data Out වලංගුයි |
රොබෝ |
| 41503 | IO-Link Revision | රොබෝ |
| 41504 | Com මාදිලිය: COM1 = 0 COM2 = 1 COM3 = 2 |
රොබෝ |
| 41505 | මාස්ටර් සයිකල් වේලාව | රොබෝ |
| 41506 | ක්රියාවලි දත්ත ආදාන ප්රමාණය (බයිට්) | රොබෝ |
| 41507 | ක්රියාවලි දත්ත ප්රතිදාන ප්රමාණය (බයිට්) | රොබෝ |
| 41508 | විකුණුම්කරු හැඳුනුම්පත (පෙර 1.1 උපාංග සඳහා) | රොබෝ |
| 41509-41510 | උපාංග ID (පෙර 1.1 උපාංග සඳහා) | රොබෝ |
| 41511 | අවම චක්ර කාලය | රොබෝ |
| 41512-41543 | විකුණුම්කරුගේ නම | රොබෝ |
| 41544-41575 | විකුණුම්කරු පෙළ | රොබෝ |
| 41576-41607 | නිෂ්පාදන නම | රොබෝ |
| 41608-41639 | නිෂ්පාදන හැඳුනුම්පත | රොබෝ |
| 41640-41671 | නිෂ්පාදන පෙළ | රොබෝ |
| 41672-41679 | අන්රක්රමික අංකය | රොබෝ |
| 41680-41711 | දෘඪාංග සංශෝධනය | රොබෝ |
| 41712-41743 | ස්ථිරාංග සංශෝධනය | රොබෝ |
| 41744-41759 | යෙදුම විශේෂිත Tag | රොබෝ |
| 41760-41775 | කාර්යය Tag | රොබෝ |
| 41776-41791 | ස්ථානය Tag | රොබෝ |
| 41792-41823 | Profile ලක්ෂණය | රොබෝ |
- ගණන් බැලීම් (IO-Link අතුරුමුහුණත පිරිවිතර V1.1.3, වගුව E.4 වෙතින්):
- 0: NO_DEVICE
- 1: අක්රියයි
- 2: PORT_DIAG
- 3: PR මෙහෙයුම්
- 4: ක්රියාත්මක කරන්න
- 5: DI_C/Q
- 6: DO_C/Q
ක්රියාවලි දත්ත ආදානය
උපාංගයක් සම්බන්ධ වී නොමැති නම්, සියලුම රෙජිස්ටර් 0 ලෙස කියවේ. භාවිත නොකළ ක්රියාවලි දත්ත බයිට් 0 ලෙසද කියවේ.
දත්ත බයිට් ලියාපදිංචි එන්ඩියන් මාරු කර නැත. දත්ත ගෙවීමේ බයිට් අනුපිළිවෙල උපාංගයේ බයිට් අනුපිළිවෙලට ගැලපේ.
මෙම ලේඛනවලට ලිවීමේදී දෝෂයක් ඇති වේ.
| ලියාපදිංචි කරයි | පරාමිතිය | ප්රවේශය |
| 41001 | වරාය තත්ත්වය: බිට්0 = සම්බන්ධද? බිට්1 = ක්රියාවලි දත්ත වලංගුද? බිට්2 = සිදුවීම පොරොත්තුද? බිට්3 = ISDU සඳහා සූදානම්ද? බිට්4 = Pin4 SIO රාජ්යය බිට්5 = Pin2 SIO රාජ්යයBit6-7 = Pin4 මාදිලිය: SDCI මාදිලිය = 0 SIO ආදාන මාදිලිය = 1 SIO ප්රතිදාන මාදිලිය = 2Bit8-10 = Pin2 මාදිලිය: ආබාධිත = 0 ආදාන සාමාන්ය = 1 ප්රතිදානය = 2 රෝග විනිශ්චය ආදානය = 3 ප්රතිලෝම ආදානය = 4 |
රොබෝ |
| 41002-41017 | දත්ත | රොබෝ |
විවික්ත ප්රකාරය ආදාන ක්රියාවලි දත්ත ලෙස එක් කළ හැකි අතර එමඟින් විවික්ත ප්රතිදාන මාදිලිය භාවිතා කරන විට ප්රධාන යලි පිහිටුවීමක් අනාවරණය කර ගත හැක. යළි පිහිටුවීමෙන් පසුව, ප්රධානියා Pin4 හි SDCI ප්රකාරයට ආපසු පැමිණෙන අතර in2 හි අක්රිය කර ඇත.
ක්රියාවලි දත්ත ප්රතිදානය
දත්ත බයිට් ලියාපදිංචි එන්ඩියන් මාරු කර නැත. දත්ත ගෙවීමේ බයිට් අනුපිළිවෙල උපාංගයට ලියා ඇති බයිට් අනුපිළිවෙලට ගැලපේ. මෙම පරාමිතිය කියවීම ඇඩැප්ටරය වෙත ලියා ඇති වඩාත්ම මෑත ක්රියාවලි දත්ත ප්රතිදානය ලබා දෙයි.
සංවේදකයක් විසන්ධි කර නැවත සම්බන්ධ කර ඇත්නම් ක්රියාවලි දත්ත හැසිරීම නිර්වචනය නොවේ.
| ලියාපදිංචි කරයි | පරාමිතිය | ප්රවේශය |
| 41051 | Bit0 = වලංගු වේ, 3 Bit1 = Pin4 ප්රතිදාන තත්ත්වය 3 Bit2 = Pin2 ප්රතිදාන තත්ත්වය |
r/w |
| 41052-41067 | දත්ත | r/w |
ISDU (දර්ශක/උපබද්ධ) දත්ත
ISDU දත්ත මෙහෙයුම් ඉල්ලීම්/ප්රතිචාර ආකෘතියක් මත පදනම් වේ. මුලින්ම ඉල්ලීම ඇඩප්ටරයට ලියා ඇත, පසුව ප්රතිචාරය කියවනු ලැබේ. ඉල්ලීම අවහිර නොවන බැවින්, ඉල්ලීම සම්පූර්ණ වූ විට තීරණය කිරීමට ප්රතිචාරයේ තත්ව ලේඛනය මත විමසා බැලිය යුතුය.
ඕනෑම ඉල්ලීම් ලේඛනයකට ලිඛිතව ඉල්ලීමක් අවුලුවයි. ලිවීම බහුවිධ ලිවීමේ මෙහෙයුම් වලට කැඩීමට අවශ්ය නම්, සියලුම දත්ත ඇඩැප්ටරයට ලියා ඇති තෙක් ඉල්ලීම හැසිරවීම වැළැක්වීමට NOP opcode එකක් ලිවිය යුතුය.
ප්රතිඵල ලේඛනයේ ඉල්ලා සිටින මෙහෙයුම සාර්ථක වූවාද අසාර්ථක වූවාද යන්න පිළිබඳ ඇඟවීමක් අඩංගු වේ. අසමත් වීමකදී, උපාංගය විසින් ආපසු ලබා දුන් දෝෂ කේතය ලබා ගත නොහැක.
දත්ත බයිට් ලියාපදිංචි එන්ඩියන් මාරු කර නැත. දත්ත ගෙවීමේ බයිට් අනුපිළිවෙල උපාංගයෙන් කියවන/ලිඛිත බයිට් අනුපිළිවෙලට ගැලපේ.
ISDU ඉල්ලීම් රෙජිස්ටර් බ්ලොක්
ලිවීමක් සඳහා, දත්ත දිග උපාංගයට ලියා ඇති අවශ්ය දත්ත දිගට ගැළපිය යුතුය. කියවීම සඳහා, දිග ගණන් නොගත යුතු ය; එනම්, නැවත කියවීමේ දිග ඇඩැප්ටරය මගින් පරීක්ෂා නොකෙරේ.
ලිවීමක් සඳහා, දත්ත සංවේදකයට ලිවිය යුතු දත්ත අඩංගු වේ. කියවීම සඳහා, දත්ත ගණන් නොගැනීමකි.
| ලියාපදිංචි කරයි | පරාමිතිය | ප්රවේශය |
| 41301 | මෙහෙයුම: NOP = 0 කියවන්න = 1 ලියන්න = 2 |
r/w |
| 41302 | දර්ශකය | r/w |
| 41303 | උප දර්ශක (උපරිම = 255) | r/w |
| 41304 | දත්ත දිග (උපරිම = 238) | r/w |
| 41305-41423 | දත්ත | r/w |
ISDU ප්රතිචාර රෙජිස්ටර් බ්ලොක්
Operation, Index, සහ Sub Index වඩාත්ම මෑත ඉල්ලීමේ අගයට ගැලපේ.
ලිවීමක් සඳහා, දිග ලියා ඇති දත්තවල දිගට ගැලපේ. කියවීමක් සඳහා, දිග උපාංගයෙන් ආපසු ලබා දෙන බයිට් ගණන අඩංගු වේ. ලිවීම සඳහා, දත්ත උපාංගයට ලියා ඇති දත්ත අඩංගු වේ. කියවීමක් සඳහා, දත්ත උපාංගයෙන් කියවන දත්ත අඩංගු වේ.
2 SIO ප්රතිදාන මාදිලියේ පින් වින්යාස කර නොමැති නම්, ලිවීම් නොසලකා හරින අතර කියවීම් 0 ලෙස ලබා දෙනු ලැබේ.
අසමත් වීමක් සිදුවී ඇත්නම් (තත්ත්වය == අසමත් වීම), එවිට දත්ත දිග 2 ලෙස සකසා ඇත. දත්ත[0] හි දෝෂ කේතය අඩංගු වන අතර දත්ත[1] අතිරේක කේතය අඩංගු වේ. 0 හි දෝෂ කේතයක් ප්රධාන මොඩියුලය තුළ අභ්යන්තර දෝෂයක් නියෝජනය කරන අතර අනෙකුත් දෝෂ කේත IO-Link අතුරුමුහුණත් පිරිවිතරයේ ඇමුණුම C හි අර්ථ දක්වා ඇත.
| ලියාපදිංචි කරයි | පරාමිතිය | ප්රවේශය |
| 41101 | මෙහෙයුම (opcodes සඳහා ඉල්ලීම බලන්න) | රොබෝ |
| 41102 | තත්ත්වය: NOP = 0 ක්රියාත්මක වෙමින් පවතී = 1 සාර්ථකත්වය = 2 අසමත් වීම = 3 |
රොබෝ |
| 41103 | දර්ශකය | රොබෝ |
| 41104 | උප දර්ශක (උපරිම = 255) | රොබෝ |
| 41105 | දත්ත දිග (උපරිම = 238) | රොබෝ |
| 41106-41224 | දත්ත | රොබෝ |
ISDU තනි රෙජිස්ටර් ලිවීමෙන් කියවීම/ලිවීම
ගැලීම් සටහන තනි එකක් භාවිතයෙන් ISDU කියවීමේ/ලිවීමේ මෙහෙයුමක් සිදුකරන ආකාරය ලේඛනගත කරයි බහු රෙජිස්ටර් ලියන්න මොඩ්බස් විධානය ISDU ඉල්ලීම ලියාපදිංචි බ්ලොක්.

ඉල්ලීම ලිවීමෙන් පසු සම්බන්ධිත උපාංගය වෙත ඉල්ලීම යවනු ලැබේ. කියවීමේ මෙහෙයුමක් සඳහා, අනුපිළිවෙල අවසානයේ, ප්රතිචාර දත්ත උපාංගයෙන් ආපසු ලබා දුන් දත්ත අඩංගු වේ.
ISDU බහු රෙජිස්ටර් ලිවීම්වල කියවීම/ලිවීම
ප්රවාහ සටහන බහුවිධ භාවිතයෙන් ISDU කියවීමේ/ලිවීමේ මෙහෙයුමක් සිදුකරන ආකාරය ලේඛනගත කරයි බහු රෙජිස්ටර් ලියන්න or තනි ලේඛනයක් ලියන්න මොඩ්බස් විධාන ISDU ඉල්ලීම ලියාපදිංචි බ්ලොක්.

opcode කියවීමට / ලිවීමට ලියන තෙක් ඉල්ලීම සම්බන්ධිත උපාංගය වෙත නොයවනු ලැබේ. කියවීමේ මෙහෙයුමක් සඳහා, අනුපිළිවෙල අවසානයේ, ප්රතිචාර දත්ත උපාංගයෙන් ආපසු ලබා දුන් දත්ත අඩංගු වේ.
වරාය වින්යාසය
| ලියාපදිංචි කරයි | පරාමිතිය | ප්රවේශය |
| 41851 | වරාය මාදිලිය 4 |
r/w |
| 41852 | වලංගු කිරීමේ උපස්ථය 5 |
r/w |
| 41853 | I/Q හැසිරීම 6 |
r/w |
| 41854 | වරාය චක්ර කාලය (වෙන් කර ඇත): 0 = හැකි තරම් වේගවත් | r/w |
| 41855 | විකුණුම්කරු හැඳුනුම්පත | r/w |
| 41856-41857 | උපාංග හැඳුනුම්පත | r/w |
| 41858 | Pin4 අමතර වින්යාසය
Bit0-1: ප්රතිදාන වර්ගය: බිට් 2: 7 8 බිට් 3: 7 බිට් 4: 9 |
r/w |
| 41859 | Pin2 අමතර වින්යාසය: සාමාන්ය = 0 රෝග විනිශ්චය ආදානය = 1 ප්රතිලෝම ආදානය = |
r/w |
වරාය ප්රකාරය IOL_AUTOSTART (පෙරනිමිය) වෙත සකසා ඇත්නම්, ප්රධානියා සම්බන්ධිත උපාංගයේ විකුණුම්කරු ID සහ උපාංග ID නොසලකා හරියි.
වරාය ප්රකාරය IOL_MANUAL ලෙස සකසා තිබේ නම්, ප්රධානියා සම්බන්ධකයේදී උපාංග හැඳුනුම්පත උපාංගයට ලිවීමට උත්සාහ කරයි. විකුණුම්කරු හැඳුනුම්පත සහ උපාංග හැඳුනුම්පත උපාංගය මඟින් සහාය නොදක්වන්නේ නම්, ප්රධානියා සම්බන්ධ නොවනු ඇත.
මෙම අගය වාෂ්පශීලී නොවන අතර EEPROM වෙත ගබඩා කර ඇති අතර ඇඩැප්ටර බල චක්ර හරහා පවතී. මෙම කොටසෙහි ඕනෑම ලේඛනයකට ලිවීමෙන් පසුව, නව වින්යාස සැකසුම් යෙදීමට වරාය යළි සකසනු ලැබේ.
මෙහෙයුම් මාදිලි
IO-Link master හි ඕනෑම වරායක් සඳහා මෙහෙයුම් මාදිලිය වින්යාසගත කළ හැක. පහත මාතයන් භාවිතා කළ හැක:
අක්රිය කර ඇත
උපාංගයක් සම්බන්ධ වී නොමැති නම්, භාවිතයට නොගත් ඕනෑම IO-link මාස්ටර් පෝට් සඳහා අක්රිය කළ මාදිලිය භාවිතා කරන්න.
IO-Link අත්පොත
IO-Link මාස්ටර් සම්බන්ධ කරන්නේ යම් වෙළෙන්දා ID සහ උපාංග ID (1: IOL_MANUAL) ඇති IO-Link උපාංග පමණි.
IO-සබැඳිය ස්වයංක්රීය ආරම්භය
IO-Link මාස්ටර් සම්බන්ධිත සෑම IO-Link උපාංගයකටම සම්බන්ධ වේ (2: IOL_AUTOSTART).
ඩිජිටල් ආදානය
IO-Link වරාය සම්මත ඩිජිටල් ආදානයක් ලෙස ක්රියා කරයි (3: DI_C/Q).
ඩිජිටල් ප්රතිදානය
IO-Link වරාය සම්මත ඩිජිටල් ප්රතිදානයක් ලෙස ක්රියා කරයි (4: DO_C/Q).
රූපය 1. මෙහෙයුම් ආකාර

3 ගණන් බැලීම් (IO-Link අතුරුමුහුණත පිරිවිතර V1.1.3, වගුව E.3 වෙතින්):
- 0: අක්රියයි (SM: අක්රියයි - වරාය අක්රියයි; ආදාන සහ ප්රතිදාන ක්රියාවලි දත්ත 0; මාස්ටර් මෙම වරායේ ක්රියාකාරකම් සිදු නොකළ යුතුය)
- 1: IOL_MANUAL (SM: CFGCOM - RID, VID, DID වලංගු කිරීම ඇතුළුව පරිශීලක නිර්වචනය කළ වින්යාසය මත පදනම් වූ ඉලක්ක ප්රකාරය)
- 2: IOL_ AUTOSTART (SM: AUTOCOM - ඉලක්ක ප්රකාරය w/o වින්යාස කිරීම සහ VID/DID වලංගු කිරීම; RID මාස්ටර් සහාය දක්වන ඉහළම සංශෝධනය ලබා ගනී; වලංගු කිරීම්: NO_CHECK)
- 3: DI_C/Q (Pin 4 at M12) (SM: DI – Port in input mode SIO)
- 4: DO_C/Q (Pin 4 at M12) (SM: DO – Port in output mode SIO)
4 ගණන් බැලීම් (IO-Link අතුරුමුහුණත පිරිවිතර V1.1.3, වගුව E.3 වෙතින්):
- 0: උපාංග පරීක්ෂාවක් නැත
- 1: ගැලපෙන උපාංගය V1.0 ටයිප් කරන්න
- 2: ගැලපෙන උපාංගය V1.1 ටයිප් කරන්න
- 3: අනුකූල උපාංග V1.1 ටයිප් කරන්න, උපස්ථ + ප්රතිසාධනය කරන්න
- 4: අනුකූල උපාංගය V1.1 ටයිප් කරන්න, ප්රතිසාධනය කරන්න
5 ගණන් බැලීම් (IO-Link අතුරුමුහුණත පිරිවිතර V1.1.3, වගුව E.3 වෙතින්):
- 0: සහාය නොදක්වයි
- 1: ඩිජිටල් ආදානය
- 2: ඩිජිටල් ප්රතිදානය
6 SIO ආදාන මාදිලියේ නොමැති නම් ගණන් ගන්න එපා
7 රෝග විනිශ්චය ආදානයක් ලෙස වින්යාස කර ඇත්නම්, ආදානය අක්රිය තත්වයේ ඇති විට LED රතු පැහැයට හැරේ. සම්බන්ධිත උපාංගයේ අසාර්ථකත්වය දැක්වීමට මෙය භාවිතා කළ හැක.
8 Type 1 IEC 61131-2 Type 1 input vol. සඳහා සහය දක්වයිtagඊ මට්ටම්. Type 2 IEC 61131-2 Type 2 සහ Type 3 input voltagඊ මට්ටම්.
ක්රියාත්මක වන විට IO-Link උපාංගයක් ප්රතිස්ථාපනය කිරීම (Backup/Restore Mode)
ක්රියාත්මක වන විට IO-Link උපාංගයක් ප්රතිස්ථාපනය කිරීම සාමාන්ය දෙයක් වන අතර උපාංග සැකසීම් වෙත නොසැලකිලිමත් ලෙස වෙනස් කිරීම් මඟින් මෙහෙයුම් ගැටළු සහ අක්රීය කාලයන් ඇති විය හැක. විශේෂ දැනුමක් හෝ මෙවලම් නොමැතිව ක්රියාත්මක වන පුද්ගලයින්ට IO-Link උපාංග ඉක්මනින් සහ දෝෂයකින් තොරව ප්රතිස්ථාපනය කළ හැකිය.
IO-Link master හි උපස්ථ ක්රියාකාරිත්වය භාවිතා කරන විට, IO-Link මාස්ටර් ප්රතිස්ථාපනය කිරීමෙන් පසු නව උපාංගයට සුරකින ලද පරාමිති ස්වයංක්රීයව සපයයි. මෙය IO-Link යෙදුම්වල IO-Link උපාංග ප්රතිස්ථාපන බාධාවකින් තොරව සිදු කරයි. මෙම කාර්යය සඳහා තවත් පොදු කර්මාන්ත පදයක් වන්නේ දත්ත ගබඩා කිරීමේ ආකාරයයි.
- Backup+ Restore Mode
IO-Link මාස්ටර් මත ඇති වරායක් Backup+ Restore ලෙස සකසා ඇත්නම්, IO-Link මාස්ටර් අවසන් වරට ගබඩා කර තිබූ පරිදි, IO-Link වරායට එකතු කරන ලද නව උපාංගය, දැන් ප්රතිස්ථාපනය කළ උපාංගයට සමාන උපාංග වින්යාසය ගනී. උපස්ථයක් මඟින් වින්යාස වෙනස් කිරීම (3: අනුකූල උපාංග V1.1 වර්ගය, උපස්ථ + ප්රතිසාධනය කරන්න). - ප්රතිෂ්ඨාපනය කරන්න
IO-Link මාස්ටර් පෝට් එකෙහි ඇති පෝට් එක ප්රතිසාධනය කිරීමට සකසා ඇත්නම්, අවසාන උපස්ථයේදී මාස්ටර් තුළ සුරකින ලද සැකසුම් අනුව නව උපාංගය වින්යාසය ගනී. විය හැකි වින්යාස කිරීමේ වෙනස්කම් ප්රධානය තුළ සුරැකී නැති නිසා, ප්රතිස්ථාපනයට පෙර පෙර පැවති හැසිරීමට වඩා වෙනස් හැසිරීමක් සිදු විය හැක (4: වර්ගය අනුකූල උපාංග V1.1, ප්රතිසාධනය කරන්න).
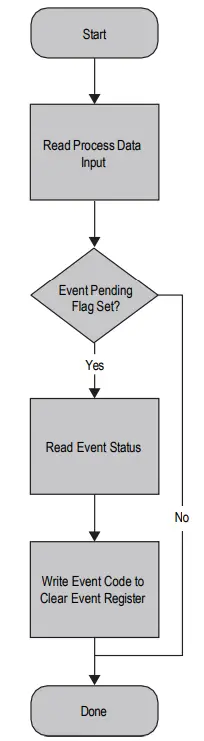
IO-Link සිදුවීම්
සිදුවීමක් පොරොත්තු වන්නේ නම්, ක්රියාවලි දත්ත ආදාන රෙජිස්ටර් බ්ලොක් එකෙහි Event Pending ධජය සකසා ඇත. පරිශීලකයෙකු IO-Link සිදුවීම් ගැන සැලකිලිමත් නොවන්නේ නම්, ඔවුන්ට මෙම ධජයේ තත්ත්වය නොසලකා හැරිය හැක.
සිදුවීම් තත්ව රෙජිස්ටර් බ්ලොක් එක හරහා සිදුවීම් කියවනු ලැබේ:
| ලියාපදිංචි කරයි | පරාමිතිය | ප්රවේශය |
| 41901 | ගණන් (උපරිම = 10) | රොබෝ |
| 41902 | මාදිලිය[0]: කිසිවක් නැත = 0 තනි පහර = 1 අතුරුදහන් = 2 දිස්වේ = 3 |
රොබෝ |
| 41903 | වර්ගය[0]: කිසිවක් නැත = 0 දැනුම්දීම = 1 අනතුරු ඇඟවීම = 2 දෝෂය = 3 |
රොබෝ |
| 41904 | කේතය[0] | රොබෝ |
| 41905 | මාදිලිය[1] 10 | රොබෝ |
| 41906 | වර්ගය[1] 10 | රොබෝ |
| 41907 | කේතය[1] 10 | රොබෝ |
සිදුවීම් FIFO බෆරයක ගබඩා කර ඇත, එහිදී මාදිලිය[0] පෝලිමේ පැරණිතම සිදුවීම වේ. පෝලිම පිරී ඇති විට නව සිදුවීමක් ලැබුනේ නම්, පෝලිමේ පැරණිම සිදුවීම පිටතට මාරු කරනු ලැබේ.
සිදුවීමක් කියවා අවසන් වූ පසු, එහි සිදුවීම් කේතය Clear Event Register වෙත ලිවීමෙන් එය හිස් කළ හැක:
| ලියාපදිංචි කරයි | පරාමිතිය | ප්රවේශය |
| 41951 | සිදුවීම් කේතය | w/o |
O-Link සිදුවීම් සැකසීම
දත්ත ගබඩා කිරීම
දත්ත ගබඩා වින්යාසය Port Configuration object හි කොටසක් ලෙස සකසා ඇත. දත්ත ගබඩා විධාන ලේඛනය භාවිතයෙන් ද මෙහෙයුම් අතින් ක්රියාත්මක කළ හැක:
| ලියාපදිංචි කරයි | පරාමිතිය | ප්රවේශය |
| 41981 | දත්ත ගබඩා කිරීමේ විධානය: NOP = 0 උඩුගත කිරීම = 1 බාගත කිරීම = 2 පැහැදිලි = 3 |
w/o |
විධානය ලිවීමෙන් වහාම විධානය ක්රියාත්මක වේ.
ඉල්ලා ඇති දත්ත ගබඩා විධානයේ තත්ත්වය දත්ත ගබඩා විධාන තත්ව ලේඛනය හරහා ප්රවේශ විය හැක:
| ලියාපදිංචි කරයි | පරාමිතිය | ප්රවේශය |
| 41991 | දත්ත ගබඩා විධාන තත්ත්වය: NOP = 0 ක්රියාත්මක වෙමින් පවතී = 1 සාර්ථකත්වය = 2 අසමත් වීම = 3 |
රොබෝ |
දත්ත ගබඩා අන්තර්ගතය
පහත සඳහන් ලේඛන සාමාන්ය 40000-49999 රැඳවුම් ලේඛන පරාසයෙන් පිටත වේ. ඒවා ලබා ගත හැක්කේ සෘජු ආමන්ත්රණය හරහා මිස මොඩ් නිරූපකය හරහා නොවේ.
| ලියාපදිංචි කරයි | පරාමිතිය | විස්තරය ලියාපදිංචි කරන්න |
| 50000 | වරාය තෝරා ගැනීම | — |
| 50001 | මෙහෙයුම | 0 = NOP 1 = කියවන්න 2 = ලියන්න |
| 50002 | තත්වය 11 | 0 = NOP 1 = ක්රියාත්මක වෙමින් පවතී 2 = සාර්ථකත්වය 3 = අසමත් වීම |
දත්ත ආචයන අන්තර්ගතය කියවීම/ලිවීම සම්බන්ධිත උපාංගය වෙත උඩුගත කිරීමක්/බාගැනීමක් සිදු නොවේ. එසේ කිරීමට, සුදුසු වරායේ දත්ත ගබඩා විධාන ලේඛනයට අපේක්ෂිත මෙහෙයුම ලියන්න.
| ලියාපදිංචි කරයි | පරාමිතිය |
| 50100-51123 | දත්ත ගබඩා අන්තර්ගතය |
දත්ත ගබඩා කියවීමේ මෙහෙයුමක් සිදු කිරීමට පෙර දත්ත ගබඩා අන්තර්ගතය ජනාකීර්ණ නොවේ (0 ලෙස කියවන්න).
මාස්ටර් එක් වරායකට වෙනම දත්ත ගබඩා කිරීමේ අන්තර්ගතයන් ගබඩා කිරීමට සහාය දක්වන අතර, සන්නිවේදන අරමුණු සඳහා සියලුම වරායන් සඳහා තනි බෆරයක් බෙදා ගනී. බහු වරායන් හරහා දත්ත ගබඩා කිරීමේ අන්තර්ගතයට සහය දැක්වීම සඳහා, අන්තර්ගතය කියවීමට/ලිවීමට පෙර දත්ත ගබඩා ඉල්ලීම් ලේඛනයේ වරාය සඳහන් කළ යුතුය.
දත්ත ගබඩා අන්තර්ගතයෙන් කියවීම

දත්ත ගබඩා අන්තර්ගතයෙන් ලිවීම

අන්වර්ථ නාම ලේඛන
රැඳවුම් රෙජිස්ටර් වල කොටසක් වන රෙජිස්ටර් කට්ටල දෙකක් ඇත.
කියවීමට පමණක් අන්වර්ථ නාම ලේඛන
මෙම කට්ටලය පරිශීලක-වින්යාසගත කළ හැකි අන්වර්ථ වින්යාස ලේඛන වේ:
| ලියාපදිංචි කරයි | පරාමිතිය | ප්රවේශය |
| 40701-40768 | අන්වර්ථ නාම ලියාපදිංචි ලිපිනය කියවන්න/පමණක් | r/w |
මෙම කොටසේ සෑම ලේඛනයකම අනුරූප අන්වර්ථ රඳවන ලේඛනය සඳහා 16-bit ලියාපදිංචි ලිපිනය අඩංගු වේ, එය අන්වර්ථ ලියාපදිංචි කිරීමේ අවකාශයේ කියවිය හැකිය:
| ලියාපදිංචි කරයි | පරාමිතිය | ප්රවේශය |
| 40501-40568 | අන්වර්ථ නාම ලේඛනය කියවන්න/පමණක් | රොබෝ |
අන්වර්ථ නාම ලේඛනයක් කියවන විට, ලේඛනයේ ඇති දත්ත අනුරූප අන්වර්ථ වින්යාස ලේඛනයේ ඇති ලිපිනයේ අන්තර්ගතයෙන් පුරවනු ලැබේ. ලිපිනය සෘජු හෝ mod නිරූපක ලිපින තුළ ගබඩා කළ හැක. සියලුම අන්වර්ථ නාම ලේඛන කියවීමට පමණක් වන අතර, අන්වර්ථ නාම ලේඛනයකට ලිවීමට නොහැකි බව සලකන්න.
සහාය නොදක්වන රෙජිස්ටර් ලිපිනයකට වින්යාස කර ඇති ඕනෑම අන්වර්ථ නාම ලේඛනයක්, හෝ වෙනත් හේතුවක් නිසා කියවීමේ ක්රියාවලිය අසාර්ථක වූ විට, කියවන විට බිංදුවක් ලෙස ආපසු පැමිණේ. කියවන විට.
මෙම ලේඛනයට ලිවීම් 11 නොසලකා හරිනු ලැබේ.
Example
තනි කියවීමේ මෙහෙයුමකදී තොට හතරම සඳහා ක්රියාවලි දත්ත රාජ්ය ලේඛන කියවීම සලකා බලන්න. මෙම example, පහත දත්ත සමඟ රඳවා ගැනීමේ ලේඛන වින්යාස කර ඇත:
| ලියාපදිංචි කරන්න | වටිනාකම | විස්තරය ලියාපදිංචි කරන්න |
| 40701 | 41001 | වරාය 1 ආදාන ක්රියාවලි දත්ත තත්ත්වය |
| 40702 | 42001 | වරාය 2 ආදාන ක්රියාවලි දත්ත තත්ත්වය |
| 40703 | 43001 | වරාය 3 ආදාන ක්රියාවලි දත්ත තත්ත්වය |
| 40704 | 44001 | වරාය 4 ආදාන ක්රියාවලි දත්ත තත්ත්වය |
අන්වර්ථ නාම ලේඛන කියවා ඇත්නම්, ඒවායේ පහත සඳහන් ලේඛන අන්තර්ගතයන් අඩංගු වේ:
| ලියාපදිංචි කරන්න | වටිනාකම | විස්තරය ලියාපදිංචි කරන්න |
| 40501 | 41001 | වරාය 1 ආදාන ක්රියාවලි දත්ත තත්ත්වය |
| 40502 | 42001 | වරාය 2 ආදාන ක්රියාවලි දත්ත තත්ත්වය |
| 40503 | 43001 | වරාය 3 ආදාන ක්රියාවලි දත්ත තත්ත්වය |
| 40504 | 44001 | වරාය 4 ආදාන ක්රියාවලි දත්ත තත්ත්වය |
පෙරනිමියෙන්, අන්වර්ථ නාම ලේඛනය, පවතින සියලුම වරායන් සඳහා අනුක්රමික ලේඛන සිතියමක් තුළ දත්ත සැකසීමට සකසනු ලැබේ. Restore Factory Configuration Holding Register (40605) වෙත ලිවීමෙන් අන්වර්ථ වින්යාසය සෑම විටම එහි කර්මාන්තශාලා පෙරනිමි අගයට ප්රතිසාධනය කළ හැක. අන්වර්ථ රෙජිස්ටර් ඉඩ ප්රමාණය 4-port උපාංගයකින් සියලුම ආදාන ක්රියාවලි දත්ත කියවීමට ඉඩ සලසයි.
අන්වර්ථ නාම ලේඛන කියවන්න-ලියන්න
මෙම කට්ටලය කියවීමට-ලිවීමට අවසර ඇති අන්වර්ථ නාම ලේඛන මාලාවකි:
| ලියාපදිංචි කරයි | පරාමිතිය | ප්රවේශය |
| 40901-40968 | අන්වර්ථ නාම ලේඛන ලිපිනය කියවන්න/ලියන්න | r/w |
මෙම කොටසේ සෑම ලේඛනයකම අනුරූප අන්වර්ථ රඳවන ලේඛනය සඳහා 16-bit ලියාපදිංචි ලිපිනය අඩංගු වේ, එය අන්වර්ථ ලියාපදිංචි කිරීමේ අවකාශයේ කියවිය හැකිය:
| ලියාපදිංචි කරයි | පරාමිතිය | ප්රවේශය |
| 40801-40868 | අන්වර්ථ නාම ලේඛනය කියවන්න/ලියන්න | r/w |
පෙරනිමියෙන්, එක් එක් වරාය සඳහා ප්රතිදාන ක්රියාවලි දත්ත වෙත යොමු කිරීමට කියවීමට-ලියන අන්වර්ථ නාම ලේඛන වින්යාස කර ඇත. 4-port උපාංගයක් සඳහා සියලුම ප්රතිදාන ක්රියාවලි දත්ත අන්වර්ථ කිරීමට ඉඩ සලසන පරිදි ලියාපදිංචි ඉඩ ප්රමාණය කර ඇත.
අන්වර්ථ නාම ලේඛනයකට ලිවීම අසාර්ථක වුවහොත් (උදාample, අන්වර්ථ නාම ලේඛනය ලිවිය නොහැකි නම්), අන්වර්ථ නාම ලේඛනයේ ලිවීමේ ක්රියාකාරිත්වය NACK වනු ඇත. 65535 ලෙස සකසා ඇති රෙජිස්ටර් අගයක් සෑම විටම 0 ලෙස කියවනු ලබන අතර, ලිවීමේ ක්රියාවක් සිදු කිරීමට උත්සාහ නොකරනු ඇත.
FCC 15 කොටස B පන්තිය
මෙම උපකරණ FCC රීතිවල 15 වන කොටසට අනුකූලව B පන්තියේ ඩිජිටල් උපාංගයක් සඳහා වන සීමාවන්ට අනුකූල වන බව පරීක්ෂා කර ඇති අතර සොයා ගෙන ඇත. මෙම සීමාවන් සැලසුම් කර ඇත්තේ නේවාසික ස්ථාපනයකදී හානිකර මැදිහත්වීම් වලට එරෙහිව සාධාරණ ආරක්ෂාවක් සැපයීම සඳහාය. මෙම උපකරණ මගින් රේඩියෝ සංඛ්යාත ශක්තිය උත්පාදනය කිරීම, භාවිතා කිරීම සහ විකිරණය කළ හැකි අතර, ස්ථාපනය කර නොමැති නම් සහ උපදෙස් වලට අනුකූලව භාවිතා කරන්නේ නම්, ගුවන්විදුලි සන්නිවේදනයට හානිකර බාධා ඇති කළ හැකිය. කෙසේ වෙතත්, විශේෂිත ස්ථාපනයකදී මැදිහත්වීමක් සිදු නොවන බවට සහතිකයක් නොමැත. මෙම උපකරණය ගුවන්විදුලි හෝ රූපවාහිනී පිළිගැනීමට හානිකර බාධාවක් ඇති කරන්නේ නම්, එය උපකරණ අක්රිය කිරීම සහ ක්රියාත්මක කිරීම මගින් තීරණය කළ හැකි නම්, පහත පියවර වලින් එකක් හෝ කිහිපයකින් බාධා නිවැරදි කිරීමට උත්සාහ කිරීමට පරිශීලකයා උනන්දු කරනු ලැබේ:
- ලැබීම නැවත යොමු කිරීම හෝ වෙනත් ස්ථානයකට මාරු කිරීම
- උපකරණ අතර වෙන්වීම වැඩි කිරීම සහ
- උපකරණ ග්රාහකය ඇති පරිපථයට වඩා වෙනස් පරිපථයක අලෙවිසැලකට සම්බන්ධ කරන්න
- බෙදාහරින්නාගෙන් හෝ පළපුරුදු ගුවන්විදුලි/රූපවාහිනී කාර්මිකයෙකුගෙන් විමසන්න
කර්මාන්තය කැනඩාව
මෙම උපාංගය CAN ICES-3 (B)/NMB-3(B) සමඟ අනුකූල වේ. මෙහෙයුම පහත සඳහන් කොන්දේසි දෙකට යටත් වේ: 1) මෙම උපාංගය හානිකර මැදිහත්වීම් ඇති නොකළ හැකිය; සහ 2) මෙම උපාංගය අනවශ්ය ක්රියාකාරිත්වයට හේතු විය හැකි මැදිහත්වීම් ඇතුළුව ලැබෙන ඕනෑම බාධාවක් පිළිගත යුතුය.
තාක්ෂණික සහාය
| උතුරු ඇමෙරිකාව:
දුරකථන: 317-916-4274 |
යුරෝපය:
දුරකථන: (+353)-21-4321-266 |

ලේඛන / සම්පත්
 |
ModBus පරිවර්තකය සඳහා HORNER R45C-2K-MQ IO-Link Master [pdf] පරිශීලක මාර්ගෝපදේශය ModBus පරිවර්තකය සඳහා R45C-2K-MQ IO-Link Master, R45C-2K-MQ, ModBus පරිවර්තකය සඳහා IO-Link Master, ModBus පරිවර්තකය සඳහා මාස්ටර්, ModBus පරිවර්තකය, පරිවර්තකය |