ROBOWORKS N10 Robot Educational Programable Mobile Robot

Specifications
| Product Name | Motor Reduction Ratio | Max Speed | Weight | Max Payload | Size | Minimal Turning Radius |
|---|---|---|---|---|---|---|
| Robot 2 | 1:27 | 1.3m/s | 5.92kg | 16 kg | 445*360*206mm | 0.77m |
| Rosbot Pro | 1:18 | 1.65m/s | 19.54kg | 35kg | 774*570*227mm | 1.02m |
| Rosbot Plus | 1:18 | 2.33m/s | 35.16kg | 22kg | 766*671*319mm | 1.29m |
Battery Life & Power Supply:
- Robot 2: About 9.5 hours (no load), About 8.5 hours (fully load)
- Robot Pro: About 4.5 hours (no load), About 3 hours (fully load)
- Power Supply: 24v 6000 mAh battery + 3A current smart charger
Steering & Driving System:
Key components include:
- Steering Gear: S20F 20kg torque digital servo
- Wheels: WH060 60kg torque digital servo, 125mm diameter solid rubber wheels for Rosbot 2, 150mm diameter solid rubber wheels for Robot Pro and
- Encoder: 500 line AB phase high precision encoder
- Suspension System: Coaxial Pendulum Suspension System for Robot 2, 4W Independent Suspension System for Robot Pro and
- Control Interface: iOS & Android App via Bluetooth or Wifi, PS2, CAN, Serial Port, USB
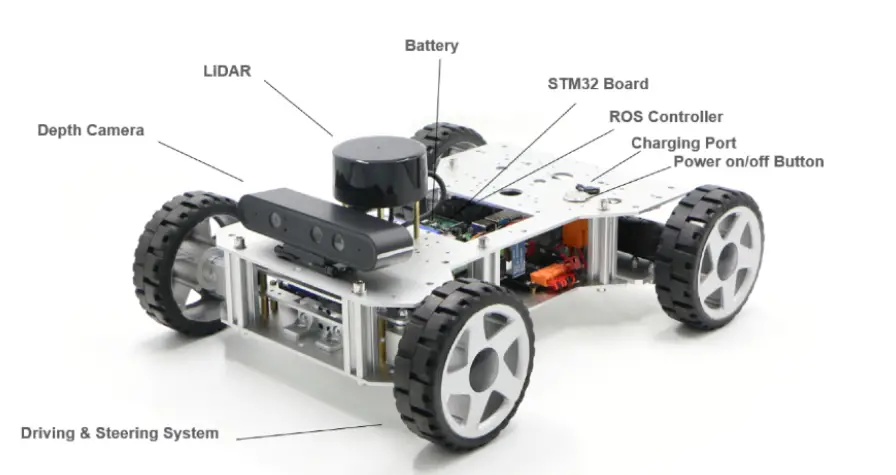
Introduction to ROS Controllers:
All RRobotsare equipped with an Orbbec Astra Depth Camera for various uses including gesture control, skeleton tracking, and 3D scanning.
STM32 Board:
The board features an STM32F103RC core with various functionalities including Memories, Clock, Reset and SupplyManagement, Power DMA, Debug Mode, I/O ports, Timers, and Communication Interface.
Frequently Asked Questions
Q: How do I charge the battery?
A: Use the provided 3A current smart charger with the 24v 6000mAh battery to charge the RRobot
Q: What is the battery life of Rosbot Pro?
A: The Robot Pro has a battery life of about 4.5 hours with no load and about 3 hours under full load conditions.
Q: Can I control the Rosbot using a smartphone?
A: Yes, you can control the Rosbot using the iOS & Android app via Bluetooth or Wifi.
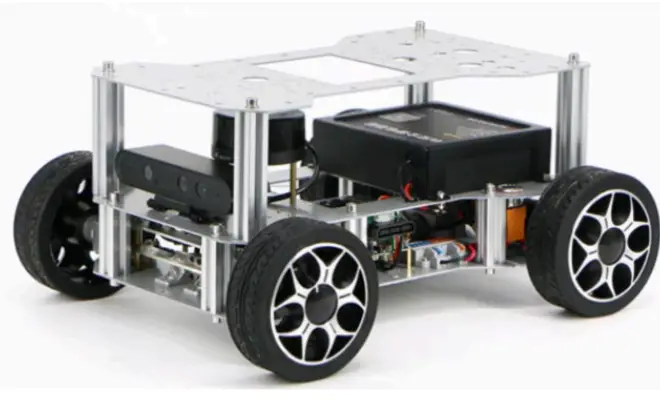
Key Component
| Varia%on | Image |
| Robot 2 | 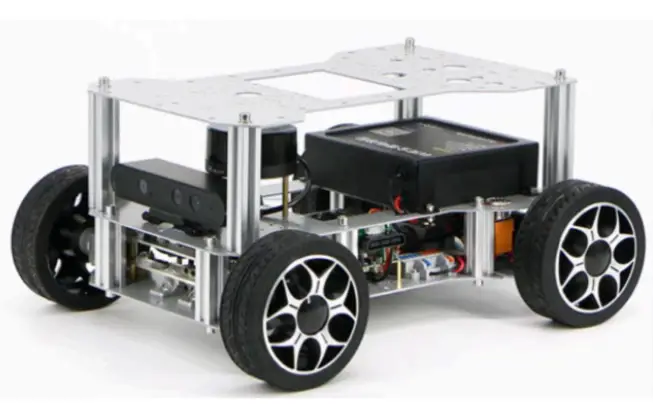 |
| Robot Pro |  |
| Robot Plus |  |
Product Specifications
|
Product Matrix |
 |
 |
 |
| Product Name | Robot 2 | Robot Pro | Robot Plus |
| Motor Reduction Ratio | 1:27 | 1:18 | 1:18 |
| Max Speed | 1.3m/s | 1.65m/s | 2.33m/s |
| Weight | 5.92kg | 19.54kg | 35.16kg |
| Max Payload | 16 kg | 35kg | 22kg |
| Size | 445*360*206mm | 774*570*227mm | 766*671*319mm |
| Minimal Turning Radius | 0.77m | 1.02m | 1.29m |
| Battery Life | About 9.5 hours (no load), About 8.5 hours (fully load) | About 4.5 hours (no load), About 3 hours (fully load) | |
| Power Supply | 24v 6000 mAh battery + 3A current smart charger | ||
| Steering Gear | S20F 20kg torque digital servo | WH060 60kg torque digital servo | |
| Wheels | 125mm diameters solid rubber wheels | 150mm diameters solid rubber wheels | 254 mm inflatable rubber wheels |
| Encoder | 500 line AB phase high precision encoder | ||
| Suspension System | Coaxial Pendulum Suspension System | 4W Independent Suspension System | |
| Control Interface | iOS & Android App via Bluetooth or Wifi, PS2, CAN, Serial Port, USB | ||
Introduction of ROS Controllers
There are 2 types of ROS Controllers available for use with the RRobotbased on the Vidia Jetson platform. Jetson Orin Nano is suited more towards research and education. Jetson Orin NX is ideal for product prototyping and commercial applications. The following table illustrates the main technical differences between the various controllers available from Roboworks. Both boards allow high-level computation and are suited to advanced robotic applications such as computer vision, deep learning, and motion planning.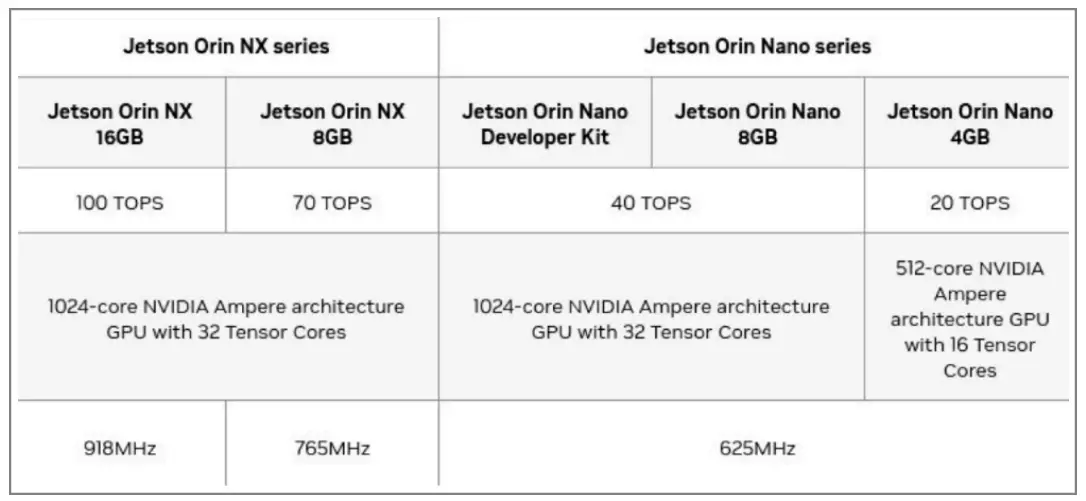
Sensing System: LiDAR & Depth Camera
A Leishen LSLiDAR is installed on all Rosbot variations with either the N10 or M10 model being used. These LLiDARsoffer a 3360-3360-degree scanning and surroundings perception and boast a compact and light ESI. They have a high Signal Noise Ratio and excellent detection performance on high/low reflective objects and perform well in strong light conditions. They have a detection range of 30 meters and a scan frequency of 12Hz. This LiDAR integrates seamlessly into the Robots, ensuring all mapping and navigational uses can be easily achieved in your project. The below table summarizes the technical specifications of the sliders: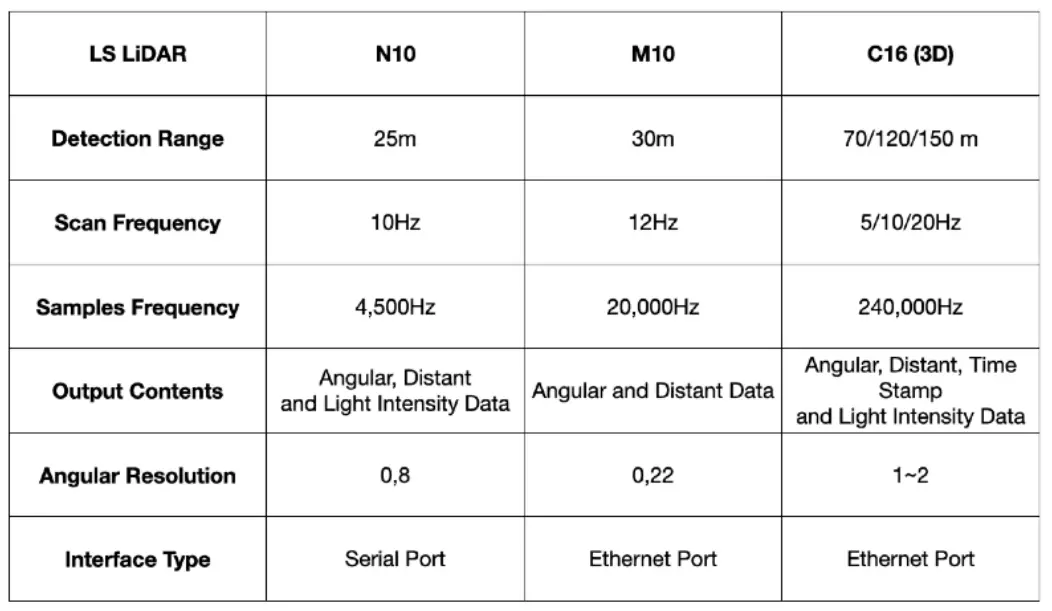
Additionally, all Robots are equipped with an Orbbec Astra Depth Camera, which is an RGBD camera. This camera is optimized for a range of uses including gesture control, skeleton tracking, 3D scanning, and point cloud development. The following table summarizes the technical features of the depth camera.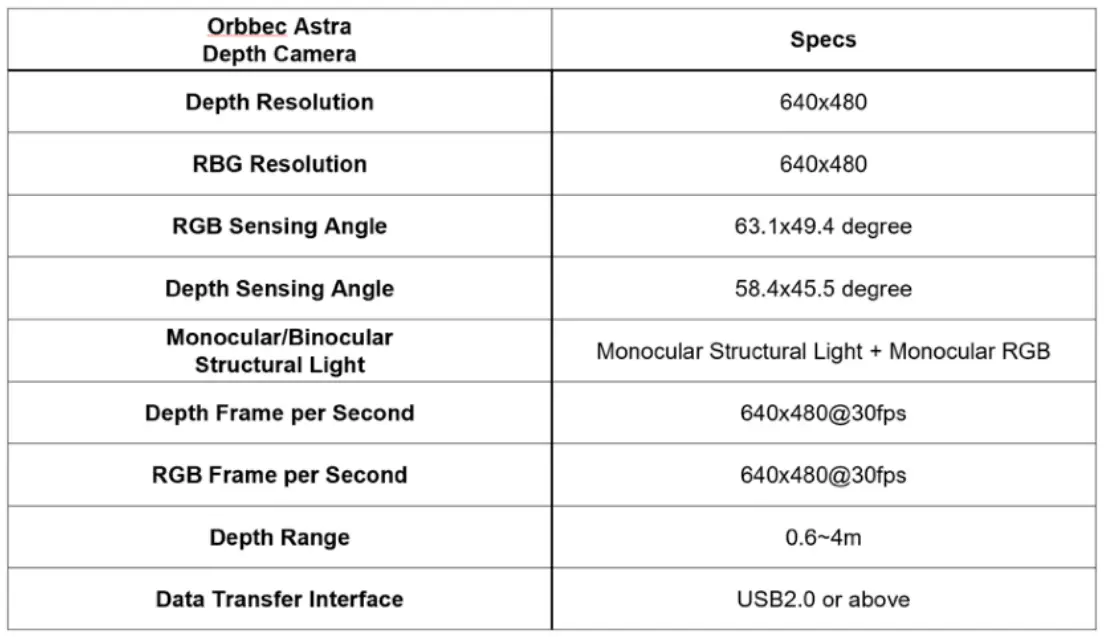
STM32 Board (Motor Control, Power Management & IMU)
The STM32F103RC Board is the microcontroller used in all Rosbots. It has a high-performance ARM Cortex-M3 32-bit RISC core operating at a 72MHz frequency along with high-speed embedded memories. It operates in -40°C to +105°C temperature range, suiting all robotic applications in worldwide climates. There are power-saving modes that allow the design of low-power applications. Some of the applications of this microcontroller include motor drives, application control, robotic applications medical and handheld equipment, PC and gaming peripherals, GPS platforms, industrial applications, alarm system video intercoms, and scanners.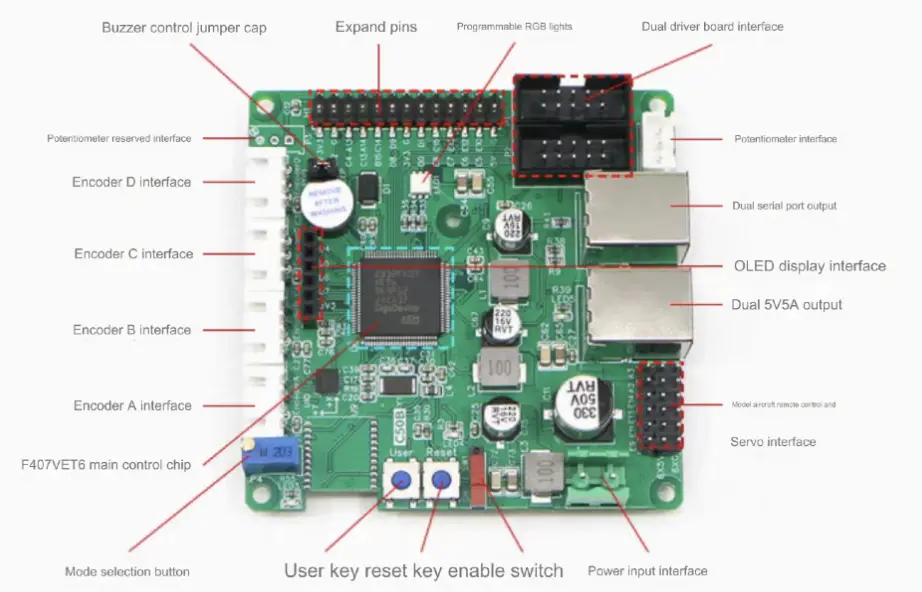
| STM32F103RC | Features |
| Core | ARM32-bit Cortex –M3 CPU Max speed of 72 MHz |
| Memories | 512 KB of Flash memory 64kB of SRAM |
| Clock, Reset, and Supply Management | 2.0 to 3.6 V application supply and I/Os |
|
Power |
Sleep, Stop, and Standby modes
V supply for RTC and backup registers BAT |
| DMA | 12-channel DMA controller |
| Debug Mode | SWD and JTAG interfaces Cortex-M3 Embedded Trace Macrocell |
| I/O ports | 51 I/O ports (mappable on 16 external interrupt vectors and 5V tolerant) |
|
Timers |
4×16-bit timers
2 x 16-bit motor control PWM timers (with emergency stop) 2 x watchdog timers (independent and Window) SysTick timer (24-bit down counter) 2 x 16-bit basic timers to drive the DAC |
|
Communication Interface |
USB 2.0 full-speed interface SDIO interface
CAN interface (2.0B Active) |
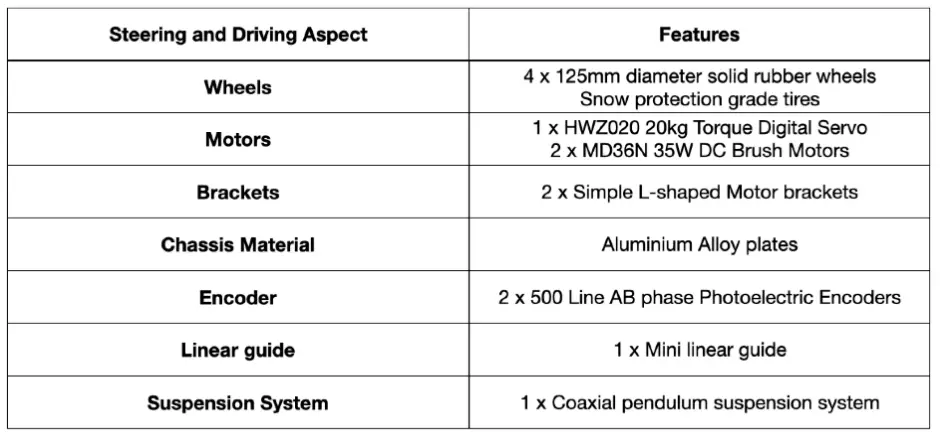
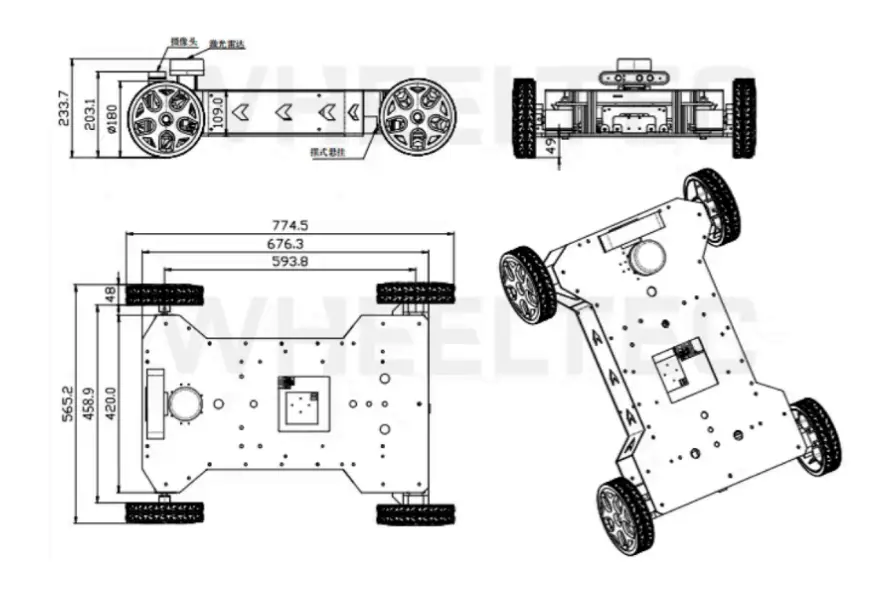
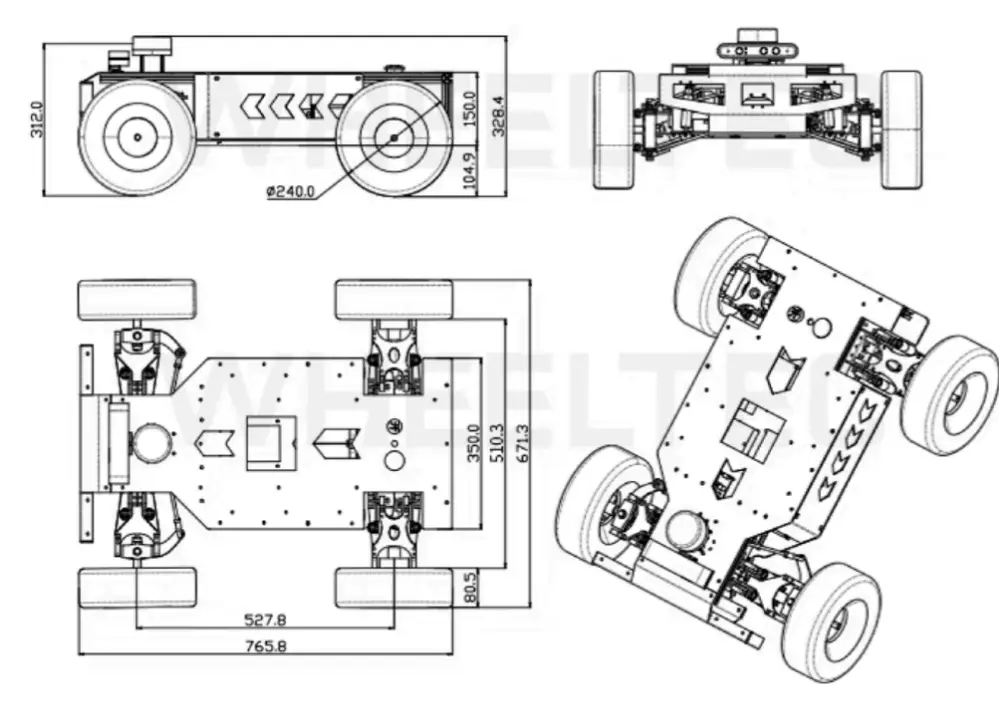
Steering & Driving System
The Steering and Driving system is integrated with the design and build of the Robot. Depending on the model purchased it will be either a 2-wheel or 4-wheel drive, with both options being suitable for a variety of research and development purposes. The wheels on all Robots are solid rubber with snow-protection grade tires. There is a coaxial pendulum suspension system, and the range Robots are equipped with shock absorbers with independent suspension systems, ensuring they can successfully navigate difficult terrain.
Steering and Driving Technical Specifications:
Robot Chassis Design Diagram:
Robot 2

Robot Pro
Robot Plus
Power Management
Power Mag – Magnetic LFP Battery:
All Rosbots come with a 6000 mAh Power Mag, a magnetic LFP (Lithium Iron Phosphate) battery, and a Power Charger. Customers can upgrade the battery to 20000 mAh at an additional cost. LFP batteries are a type of lithium-ion battery known for their stability, safety, and long cycle life. Unlike traditional lithium-ion batteries, which use cobalt or nickel, LFP batteries rely on iron phosphate, offering a more sustainable and less toxic alternative. They are highly resistant to thermal runaway, reducing the risk of overheating and fire. While they have a lower energy density compared to other lithium-ion batteries, LFP batteries excel in durability, with longer lifespan, faster charging, and better performance in extreme temperatures, making them ideal for electric vehicles (EVs) and energy storage systems. Power Mag can be attached to any metal surface of a robot due to its magnetic base design. It makes swapping batteries quick and easy.
Technical Specifications:
| Model | 6000 mAh | 20000 mAh |
| Battery Pack |
22.4V 6000mAh |
22.4V 20000mAh |
|
Core Material |
Lithium Iron Phosphate |
Lithium Iron Phosphate |
| Cutoff Voltage | 16.5 V | 16.5 V |
|
Full Voltage |
25.55 V |
25.55 V |
| Charging Current | 3A | 3A |
| Shell Material |
Metal |
Metal |
| Discharge Performance | 15A Continuous Discharge | 20A Continuous Discharge |
|
Plug |
DC4017MM female connector (charging) XT60U-F female connector (discharging) |
DC4017MM female connector (charging) XT60U-F female connector (discharging) |
|
Size |
177*146*42mm |
208*154*97mm |
|
Weight |
1.72kg |
4.1kg |
Battery Protection
Short circuit, overcurrent, overcharge, over-discharge protection, support charging while using, built-in safety valve, flame retardant board.
Auto Charging Station (Power+):
Auto Charging Station is bundled with the Rosbot 2+ model and can be purchased separately to work with Rosbot 2, Rosbot Pro, and Rosbot Plus.
ROS 2 Quick Start
When the robot is first powered on, it is controlled by ROS by default. Meaning, the STM32 chassis controller board accepts commands from the ROS 2 Controller – The Jetson Orin. Initial setup is quick and easy, from your host PC (Ubuntu Linux recommended) connect to the robot’s Wi-Fi hotspot. The password by default is “Dongguan”.Next, connect to the robot using SSH via the Linuxterminatee l, The P address is 192.168.0.10and 0, and the default password is Dongguan.
With terminal access to the robot, you can navigate to the ROS 2 workspace folder, under “wheeltec_ROS 2” Before running test programs, navigate to wheeltec_ROS 2/turn_on_wheeltec_robot/ and locate wheeltec_udev.sh – This script must be run, typically only once to ensure proper configuration of peripherals. You are now able to test the robot’s functionality, to launch the ROS 2 controller functionality, run: “relaunch turn_on_wheeltec_robot turn_on_wheeltec_robot.launch”
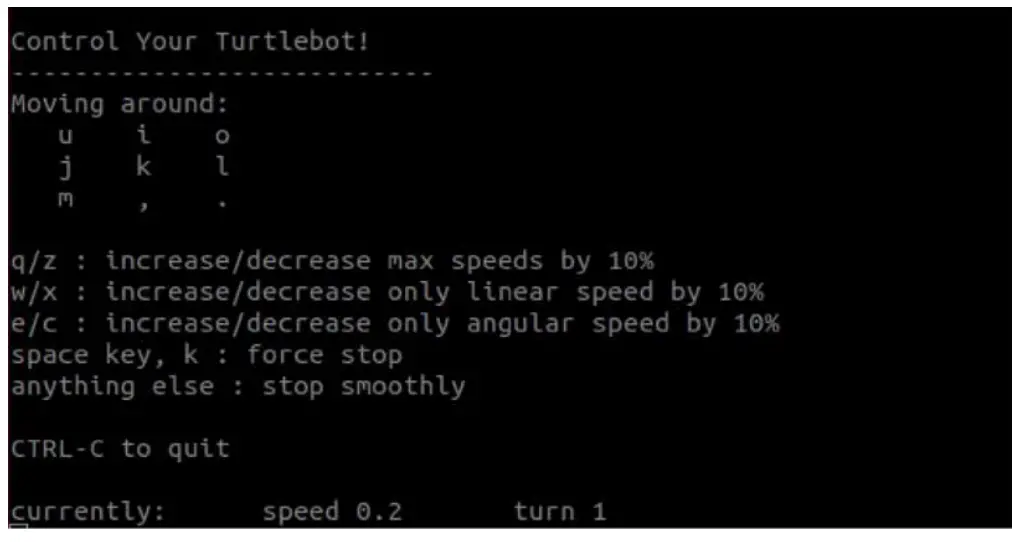
In a second terminal, you can use the keyboard_teleop node to validate chassis control, this is a modified version of the popular ROS 2 Turtlebot example. Type: “relaunch wheeltec_robot_rc keyboard_teleop.launch”
Pre-installed ROS 2 Humble Packages
Below are the following user-oriented packages, whilst other packages may be present, these are dependencies only.
- turn_on_wheeltec_robot
This package is crucial for enabling robot functionality and communication with the chassis controller. The primary script “turn_on_wheeltec_robot.launch” must be used upon each boot to configure ROS 2 and cthe ontroller. - wheeltec_rviz2
Contains launch files to launch viz with custom configuration for Pickerbot Pro. - wheeltec_robot_slam
SLAM Mapping and localization package with a custom configuration for Pickerbot Pro. - wheeltec_robot_rrt2
Rapidly exploring random tree algorithm – This package enables Pickerbot Pro to plan a path to its desired location, by launching exploration nodes. - wheeltec_robot_keyboard
Convenient package for validating robot functionality and controlling using the keyboard, including from remote host PC. - wheeltec_robot_nav2
ROS 2 Navigation 2 node package. - wheeltec_lidar_ros2
ROS 2 Lidar package for configuring Leishen M10/N10. - wheeltec_joy
The joystick control package contains launch files for Joystick nodes. - simple_follower_ros2
Basic object and line following algorithms using either laser scan or depth camera. - ros2_astra_camera
Astra depth camera package with drivers and launch files.
Summary
Robot is designed for ROS (Robot Operating System) developers, educators, and students. The heart of Rosbot is the fully programmable software framework and configurable hardware architecture based on the most popular robotic platform – ROS.
The robot comes in three categories:
- Robot 2 – Suitable for ROS beginners and low-budget projects.
- Robot Pro – Suitable for ROS developers and educators who need a versatile system for rapid prototyping or teaching.
- Rosbot Plus – This is the 4WD version of Rosbot with Independent Suspension Systems. This category is serious enough to be considered for industrial and commercial development. The robot comes with popular ROS controllers such as:
- Jetson Orin Nano
- Jetson Orin NX
Prepared by: Wayne Liu, Reilly Smithers & Tara Hercz 30 September 2024
Version #: 20240930
Documents / Resources
 |
ROBOWORKS N10 Robot Educational Programable Mobile Robot [pdf] User Manual N10 Robot Educational Programable Mobile Robot, N10, Robot Educational Programable Mobile Robot, Educational Programable Mobile Robot, Programable Mobile Robot, Mobile Robot, Robot |