Raspberry Pi SC1631 Mikrokontroler Raspberry

Specyfikacja produktu
- Model: RP2350
- Opakowanie: QFN-60
- Pamięć wewnętrzna Flash: Nie
- Tomtage Regulator: Regulator przełączający na chipie
- Piny regulatora: 5 (wejście 3.3 V, wyjście 1.1 V, VREG_AVDD, VREG_LX, VREG_PGND)
Instrukcje użytkowania produktu
- Rozdział 1: Wprowadzenie
- Seria RP2350 oferuje inne opcje pakietów w porównaniu do serii RP2040. RP2350A i RP2354A są dostępne w pakiecie QFN-60 bez i z pamięcią flash, odpowiednio, podczas gdy RP2354B i RP2350B są dostępne w pakiecie QFN-80 z pamięcią flash i bez.
- Rozdział 2: Moc
Seria RP2350 wyróżnia się nowym, wbudowanym przełącznikiem głośnościtagregulator e z pięcioma pinami. Ten regulator wymaga zewnętrznych komponentów do działania, ale oferuje wyższą wydajność energetyczną przy wyższych prądach obciążenia w porównaniu do regulatora liniowego w serii RP2040. Zwróć uwagę na wrażliwość na szum w pinie VREG_AVDD, który zasila obwody analogowe.
Często zadawane pytania (FAQ)
- P: Jaka jest główna różnica pomiędzy RP2350A i RP2350B?
A: Główną różnicą jest obecność wewnętrznej pamięci flash. Model RP2350A nie ma wewnętrznej pamięci flash, natomiast model RP2350B ma. - P: Ile pinów ma vol?tagJaki regulator jest w serii RP2350?
Odp.: tomtagRegulator w serii RP2350 ma pięć pinów.
Projektowanie sprzętu z wykorzystaniem mikrokontrolerów RP2350. Budowa płytek i produktów przy użyciu mikrokontrolerów RP2350.
Kolofon
- © 2023-2024 Raspberry Pi Sp. z o.o.
- Niniejsza dokumentacja jest licencjonowana na zasadach Creative Commons Uznanie autorstwa-Bez utworów zależnych 4.0 Międzynarodowe (CC BY-ND). data kompilacji: 2024-08-08 wersja kompilacji: c0acc5b-clean
- Informacja o wyłączeniu odpowiedzialności prawnej
- DANE TECHNICZNE I DOTYCZĄCE NIEZAWODNOŚCI PRODUKTÓW RASPBERRY PI (W TYM ARKUSZE DANYCH) ZMIENIANE OKRESOWO („ZASOBY”) SĄ DOSTARCZANE PRZEZ RASPBERRY PI LTD („RPL”) „W STANIE, W JAKIM SIĘ ZNAJDUJĄ”, A WSZELKIE WYRAŹNE LUB DOROZUMIANE GWARANCJE, W TYM MIĘDZY INNYMI DOROZUMIANE GWARANCJE PRZYDATNOŚCI HANDLOWEJ I PRZYDATNOŚCI DO OKREŚLONEGO CELU, SĄ WYŁĄCZONE. Maksymalnie w zakresie dozwolonym przez obowiązujące prawo, w żadnym wypadku RPL nie ponosi odpowiedzialności za żadne bezpośrednie, pośrednie, przypadkowe, szczególne, przykładowe lub następcze szkody (w tym, lecz nie wyłącznie, zakup towarów lub usług zastępczych; utratę możliwości użytkowania, danych lub zysków; lub przerwę w działalności gospodarczej), niezależnie od przyczyny i podstawy odpowiedzialności, czy to na podstawie umowy, ścisłej odpowiedzialności, czy czynu niedozwolonego (w tym zaniedbania lub w inny sposób), wynikające w jakikolwiek sposób z korzystania z zasobów, nawet jeśli poinformowano o możliwości wystąpienia takich szkód.
- RPL zastrzega sobie prawo do wprowadzania wszelkich udoskonaleń, poprawek, korekt lub innych modyfikacji ZASOBÓW lub opisanych w nich produktów w dowolnym momencie i bez wcześniejszego powiadomienia.
ZASOBY są przeznaczone dla doświadczonych użytkowników z odpowiednim poziomem wiedzy projektowej. Użytkownicy ponoszą wyłączną odpowiedzialność za swój wybór i użytkowanie ZASOBÓW oraz wszelkie zastosowanie opisanych w nich produktów. Użytkownik zgadza się zabezpieczyć i zwolnić RPL z odpowiedzialności za wszelkie zobowiązania, koszty, szkody lub inne straty wynikające z korzystania z ZASOBÓW. - RPL udziela użytkownikom pozwolenia na korzystanie z ZASOBÓW wyłącznie w połączeniu z produktami Raspberry Pi. Wszelkie inne wykorzystanie ZASOBÓW jest zabronione. Nie udziela się licencji na żadne inne prawa własności intelektualnej RPL ani innych osób trzecich.
- DZIAŁANIA WYSOKIEGO RYZYKA. Produkty Raspberry Pi nie są projektowane, produkowane ani przeznaczone do użytku w niebezpiecznych środowiskach wymagających niezawodnego działania, takich jak eksploatacja obiektów jądrowych, systemów nawigacji lub komunikacji lotniczej, kontroli ruchu lotniczego, systemów uzbrojenia lub zastosowań krytycznych dla bezpieczeństwa (w tym systemów podtrzymywania życia i innych urządzeń medycznych), w których awaria produktów mogłaby prowadzić bezpośrednio do śmierci, obrażeń ciała lub poważnych szkód fizycznych lub środowiskowych („Działania wysokiego ryzyka”). RPL wyraźnie zrzeka się wszelkich wyraźnych lub dorozumianych gwarancji przydatności do działań wysokiego ryzyka i nie ponosi odpowiedzialności za użytkowanie lub włączenie produktów Raspberry Pi do działań wysokiego ryzyka.
- Produkty Raspberry Pi są dostarczane zgodnie ze Standardowymi Warunkami RPL. Dostarczanie ZASOBÓW przez RPL nie rozszerza ani w żaden inny sposób nie modyfikuje Standardowych Warunków RPL, w tym, ale nie wyłącznie, zrzeczeń się odpowiedzialności i gwarancji wyrażonych w nich.
Rozdział 1. Wprowadzenie
Rysunek 1. Wizualizacja 3D komputera RP2350A Minimal Design Ex w programie KiCadample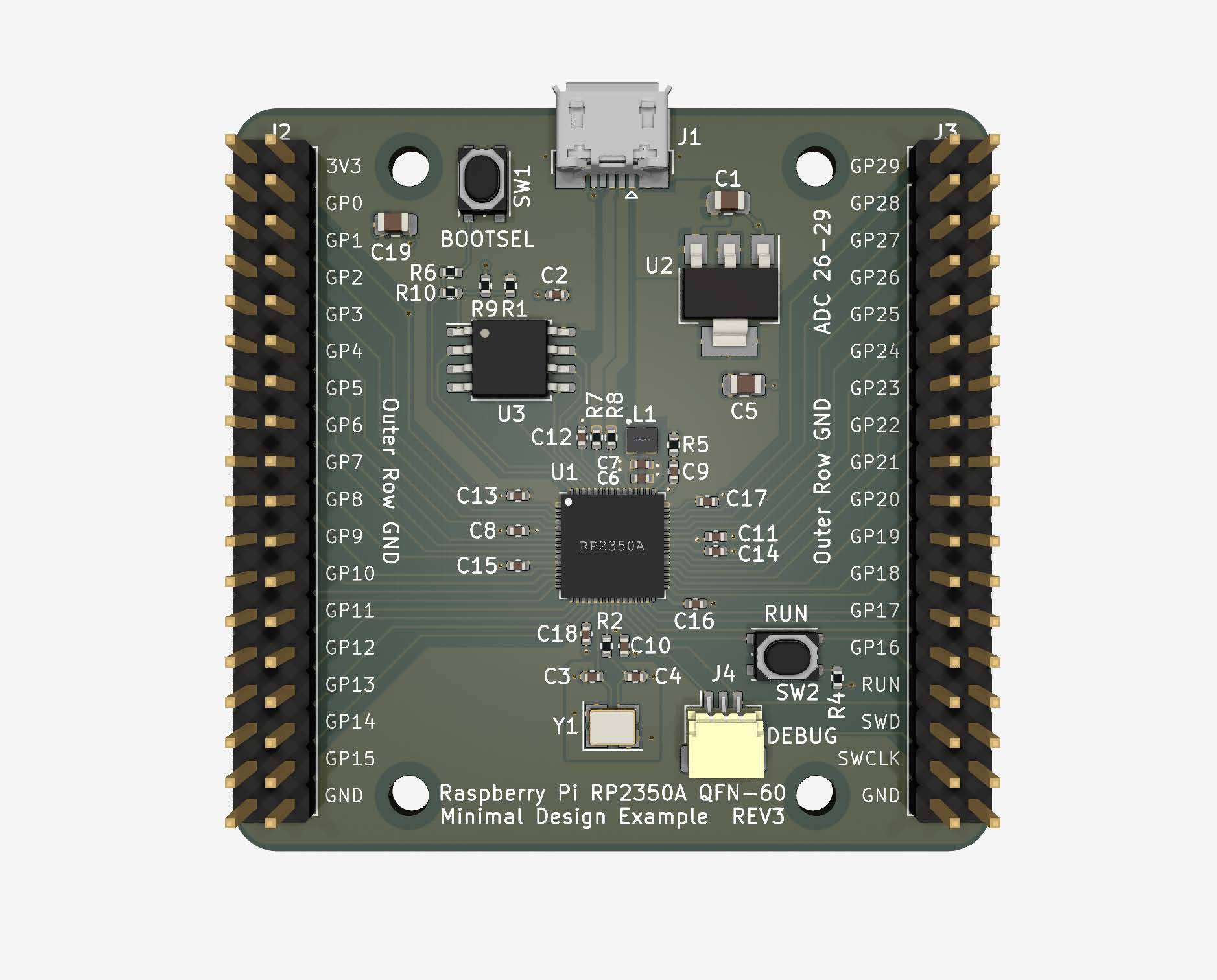
Kiedy po raz pierwszy wprowadziliśmy na rynek Raspberry Pi RP2040, wypuściliśmy również wersję o „minimalistycznym” wzornictwieample i towarzyszący przewodnik Projektowanie sprzętu z RP2040, który miejmy nadzieję wyjaśnił, jak RP2040 może być używany w prostej płytce drukowanej i dlaczego dokonano różnych wyborów komponentów. Wraz z pojawieniem się serii RP235x nadszedł czas, aby powrócić do oryginalnego projektu RP2040 Minimal i zaktualizować go, aby uwzględnić nowe funkcje, a także dla każdego z wariantów obudowy; RP2350A z obudową QFN-60 i RP2350B, który jest QFN-80. Ponownie, te projekty są w formacie Kicad (7.0) i są dostępne do pobrania (https://datasheets.raspberrypi.com/rp2350/Minimal-KiCAD.zip).
Minimalistyczna tablica
Oryginalna płyta Minimal była próbą dostarczenia prostego projektu referencyjnego, wykorzystującego absolutne minimum komponentów zewnętrznych wymaganych do uruchomienia RP2040 i nadal udostępniającego wszystkie wejścia/wyjścia. Składał się on zasadniczo ze źródła zasilania (liniowy regulator 5 V do 3.3 V), oscylatora kwarcowego, pamięci flash i połączeń wejścia/wyjścia (gniazdo micro USB i nagłówki GPIO). Nowe płyty Minimal z serii RP235x są w dużej mierze takie same, ale z pewnymi zmianami koniecznymi ze względu na nowy sprzęt. Oprócz tego, pomimo pewnego sprzeciwu wobec minimalistycznej natury projektu, dodałem kilka przycisków do bootsel i run, wraz z oddzielnym nagłówkiem SWD, co powinno tym razem oznaczać znacznie mniej frustrujące doświadczenie debugowania. Ściśle rzecz biorąc, projekty nie potrzebują tych przycisków, sygnały są nadal dostępne na nagłówkach i można je pominąć, jeśli jesteś szczególnie świadomy kosztów lub miejsca, lub masz masochistyczne tendencje.
Seria RP2040 kontra RP235x
Najbardziej oczywista zmiana dotyczy opakowań. Podczas gdy RP2040 to 7x7mm QFN-56, seria RP235x ma obecnie czterech różnych członków. Istnieją dwa urządzenia, które mają tę samą obudowę QFN-60; RP2350A, który nie zawiera wewnętrznej pamięci flash, i RP2354A, który ją ma. Podobnie QFN-80 również występuje w dwóch wersjach; RP2354B z pamięcią flash i RP2350B bez. Urządzenia QFN-60 i oryginalny RP2040 mają wspólną obudowętage.
Każdy z nich ma 30 GPIO, z których cztery są również podłączone do ADC i mają rozmiar 7x7 mm. Mimo to RP2350A nie jest bezpośrednim zamiennikiem RP2040, ponieważ liczba pinów na każdym z nich jest inna. Natomiast układy QFN-80 mają teraz 48 GPIO, a osiem z nich obsługuje teraz ADC. Z tego powodu mamy teraz dwie płytki Minimal; jedną dla urządzeń 60-pinowych i jedną dla 80-pinowych. Te płytki Minimal są zaprojektowane głównie dla części bez wewnętrznej pamięci flash (RP2350), jednak projekty można łatwo wykorzystać z wewnętrznymi urządzeniami flash (RP2354), po prostu pomijając wbudowaną pamięć flash lub nawet używając jej jako dodatkowego urządzenia flash (więcej na ten temat później). Istnieje niewielka różnica między tymi dwiema płytkami, poza faktem, że wersja QFN-80 ma dłuższe rzędy nagłówków, aby pomieścić dodatkowe GPIO, a zatem płytka jest większa.
Oprócz obudowy, największą różnicą na poziomie płytki między serią RP235x a RP2040 są zasilacze. Seria RP235x ma kilka nowych pinów zasilania i inny wewnętrzny regulator. 100-mA liniowy regulator RP2040 został zastąpiony 200-mA regulatorem przełączającym, a jako taki wymaga bardzo specyficznego układu i niemałej uwagi przy rozmieszczeniu. Zdecydowanie zalecamy, abyś uważnie śledził nasz układ i wybór komponentów; już przeszliśmy przez ból konieczności wykonania kilku iteracji projektu, więc mamy nadzieję, że Ty nie będziesz musiał.
Rysunek 2. Wizualizacja 3D komputera RP2350B w programie KiCad w wersji minimalistycznejample 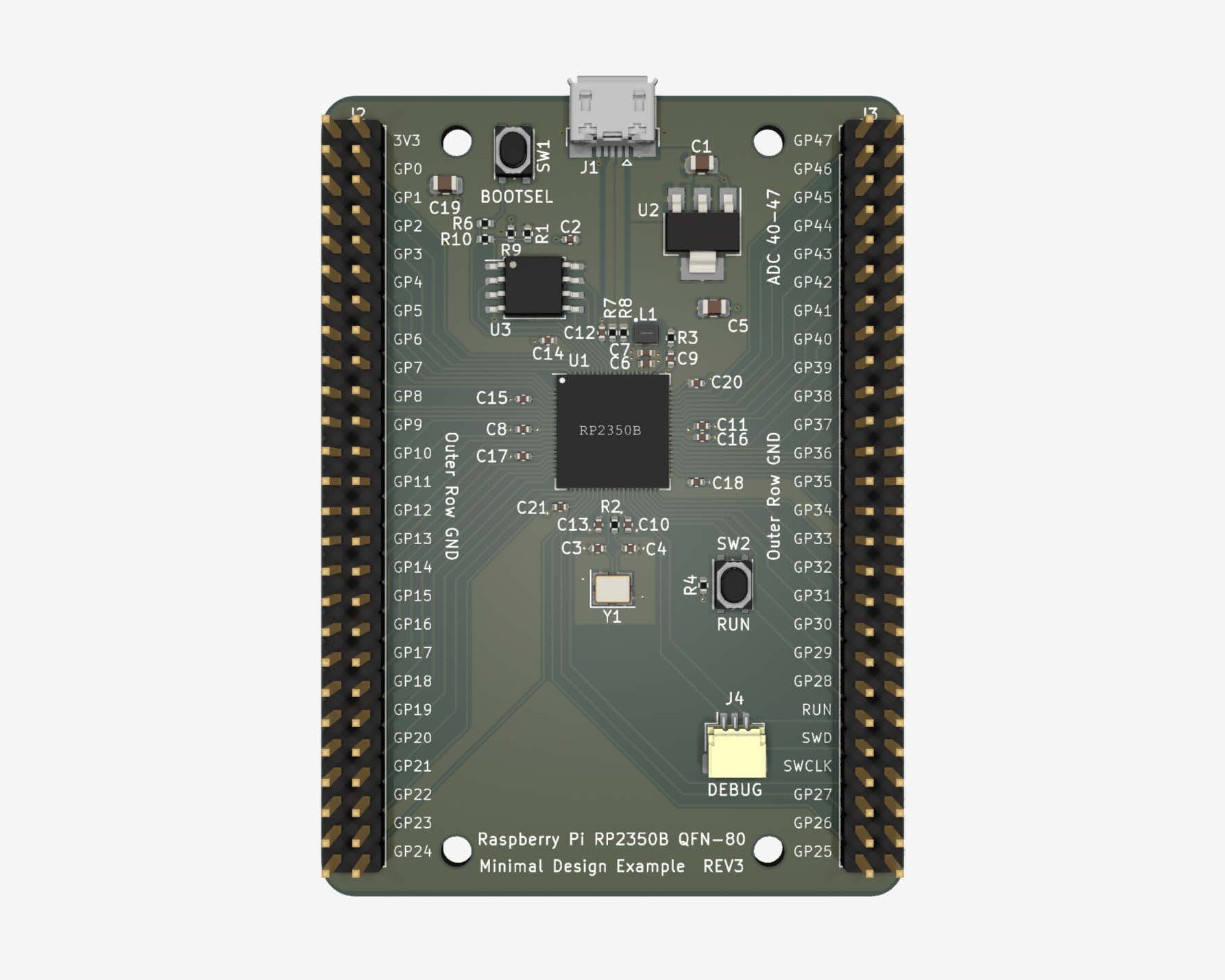
Projekt
Celem minimalistycznego projektu byłoamples ma stworzyć parę prostych płytek przy użyciu serii RP235x, które powinny być tanie i łatwe do wyprodukowania, bez użycia niepotrzebnie egzotycznych technologii PCB. Płytki Minimal są zatem projektami 2-warstwowymi, wykorzystującymi komponenty, które powinny być powszechnie dostępne i wszystkie zamontowane na górnej stronie płytki. Chociaż fajnie byłoby użyć dużych, łatwych do ręcznego lutowania komponentów, mały skok układów QFN (0.4 mm) oznacza, że użycie niektórych pasywnych komponentów 0402 (1005 metrycznych) jest nieuniknione, jeśli mają być użyte wszystkie GPIO. Podczas gdy ręczne lutowanie komponentów 0402 nie jest zbyt trudne przy użyciu porządnej lutownicy, lutowanie QFN jest prawie niemożliwe bez specjalistycznego sprzętu.
W kolejnych sekcjach postaram się wyjaśnić, do czego służy dodatkowy obwód i mam nadzieję, że w jaki sposób dokonaliśmy takich, a nie innych wyborów. Ponieważ będę mówił o dwóch oddzielnych projektach, po jednym dla każdego rozmiaru obudowy, starałem się zachować możliwie największą prostotę. O ile to możliwe, wszystkie odniesienia do komponentów dla obu płytek są identyczne, więc jeśli odniosę się do U1, R1 itd., to będzie to równie istotne dla obu płytek. Oczywistym wyjątkiem jest sytuacja, gdy komponent znajduje się tylko na jednej z płytek (we wszystkich przypadkach będzie to większa wersja 80-pinowa), wtedy dany komponent będzie znajdował się tylko w projekcie QFN-80; na przykładample, R13 pojawia się tylko na tym forum.
Rozdział 2. Moc
Zasilacze serii RP235x i RP2040 różnią się tym razem nieco, chociaż w najprostszej konfiguracji nadal wymagają dwóch zasilaczy, 3.3 V i 1.1 V. Seria RP235x jest jednocześnie bardziej energochłonna, ponieważ ma wyższą wydajność, a także bardziej oszczędna (w stanie niskiego poboru mocy) niż jej poprzedniczka, dlatego regulator liniowy w RP2040 został ulepszony o regulator przełączający. Pozwala nam to na większą wydajność energetyczną przy wyższych prądach (do 200 mA w porównaniu do poprzednich 100 mA).
Nowy wolumen na chipietagregulator
Rysunek 3. Schematyczny przekrój pokazujący wewnętrzny obwód regulatora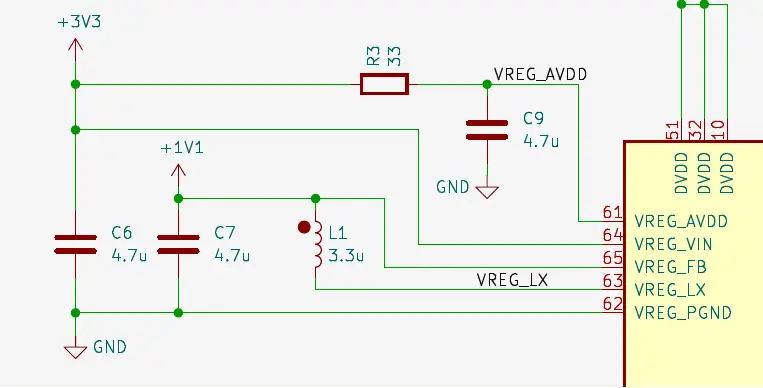
Liniowy regulator RP2040 miał dwa piny, wejście 3.3 V i wyjście 1.1 V do zasilania DVDD na chipie. Tym razem regulator serii RP235x ma pięć pinów i wymaga pewnych zewnętrznych komponentów, aby działał. Chociaż wydaje się to trochę krokiem wstecz pod względem użyteczności, regulator przełączający ma przewagętage bycia bardziej energooszczędnym przy wyższych prądach obciążenia.
Jak sama nazwa wskazuje, regulator szybko włącza i wyłącza wewnętrzny tranzystor łączący napięcie wejściowe 3.3 Vtage (VREG_VIN) do pinu VREG_LX i przy pomocy cewki indukcyjnej (L1) oraz kondensatora wyjściowego (C7) może wytworzyć wyjściowy prąd stały o objętościtage, który został obniżony z wejścia. Pin VREG_FB monitoruje objętość wyjściowątage i dostosowuje stosunek włączania/wyłączania cyklu przełączania, aby zapewnić wymaganą objętośćtage jest zachowane. Ponieważ duże prądy są przełączane z VREG_VIN do VREG_LX, wymagany jest duży kondensator (C6) blisko wejścia, aby nie zakłócać zbytnio zasilania 3.3 V. Mówiąc o tych dużych prądach przełączających, regulator ma również własne połączenie powrotne uziemienia, VREG_PGND. Podobnie jak w przypadku VREG_VIN i VREG_LX, układ tego połączenia jest krytyczny i chociaż VREG_PGND musi łączyć się z głównym GND, musi to być zrobione w taki sposób, aby wszystkie duże prądy przełączające wracały bezpośrednio do pinu PGND, nie zakłócając zbytnio reszty GND.
Ostatni pin to VREG_AVDD, który zasila obwody analogowe w regulatorze i jest bardzo wrażliwy na zakłócenia.
Rysunek 4. Schematyczny przekrój pokazujący układ PCB regulatora 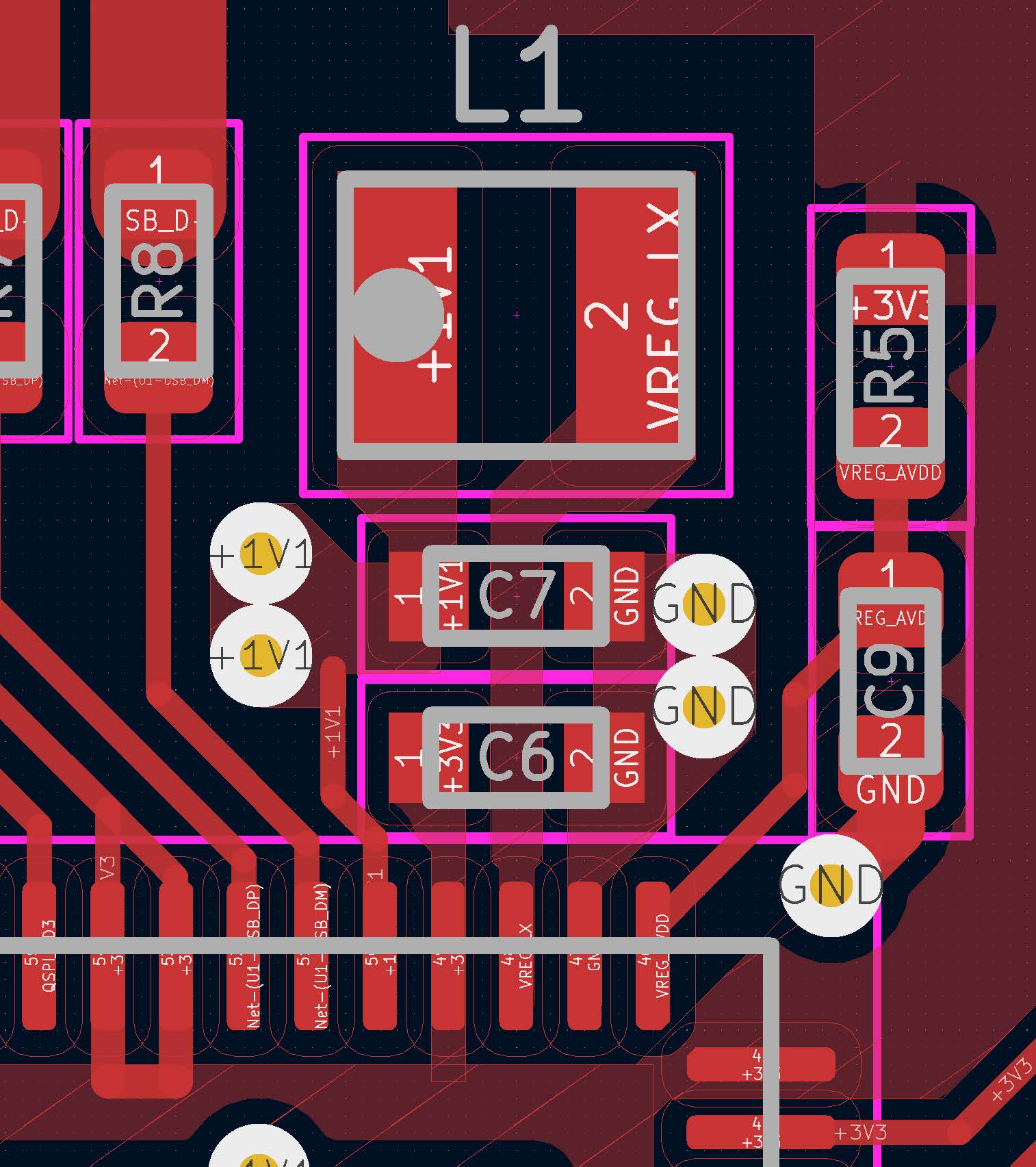
- Układ regulatora na płytkach minimalistycznych ściśle odzwierciedla układ Raspberry Pi Pico 2. Włożono wiele pracy w projekt tego obwodu, a aby był jak najlepszy, konieczne było wykonanie wielu iteracji płytki PCB. Chociaż można umieścić te komponenty na wiele różnych sposobów i nadal sprawić, aby regulator „działał” (tj. wytwarzał objętość wyjściową),tage na mniej więcej odpowiednim poziomie, wystarczająco dobrym, aby uruchomić kod), odkryliśmy, że nasz regulator musi być traktowany w dokładnie odpowiedni sposób, aby był zadowolony, a przez zadowolony mam na myśli produkowanie prawidłowej objętości wyjściowejtage w różnych warunkach prądu obciążenia.
- Podczas przeprowadzania eksperymentów w tym zakresie byliśmy nieco rozczarowani, gdy przypomniano nam, że niewygodnego świata fizyki nie zawsze można ignorować. My, jako inżynierowie, w dużej mierze staramy się robić dokładnie to; upraszczać komponenty, ignorować (często) nieistotne właściwości fizyczne, a zamiast tego skupiać się na właściwości, która nas interesuje. Na przykładampnp. prosty rezystor nie ma tylko rezystancji, ale także indukcyjności itd. W naszym przypadku (ponownie) odkryliśmy, że cewki mają pole magnetyczne z nimi związane i co ważne, promieniuje w kierunku zależnym od tego, w którą stronę nawinięta jest cewka i w jakim kierunku płynie prąd. Przypomniano nam również, że „całkowicie” ekranowany induktor nie oznacza tego, co myślisz. Pole magnetyczne jest w dużym stopniu tłumione, ale część nadal ucieka. Odkryliśmy, że wydajność regulatora można znacznie poprawić, jeśli induktor jest „właściwą stroną”.
- Okazuje się, że pole magnetyczne emitowane przez „niewłaściwie” umieszczoną cewkę zakłóca działanie kondensatora wyjściowego regulatora (C7), co z kolei zakłóca działanie obwodów sterujących w RP2350. Przy prawidłowej orientacji cewki oraz precyzyjnym układzie i wyborze komponentów użytych tutaj, problem ten znika. Niewątpliwie będą inne układy, komponenty itp., które mogłyby działać z cewką w dowolnej orientacji, ale najprawdopodobniej zajmą o wiele więcej miejsca na płytce drukowanej, aby to zrobić. Udostępniliśmy ten zalecany układ, aby zaoszczędzić ludziom wielu godzin pracy inżynierskiej, które spędziliśmy na rozwijaniu i udoskonalaniu tego kompaktowego i dobrze zachowującego się rozwiązania.
- Mówiąc wprost, posuwamy się nawet do stwierdzenia, że jeśli zdecydujesz się nie korzystać z naszego byłegoample, to robisz to na własne ryzyko. Podobnie jak robimy to już z RP2040 i obwodem kryształowym, gdzie nalegamy (no cóż, zdecydowanie sugerujemy), abyś użył konkretnej części (zrobimy to ponownie w części kryształowej tego dokumentu).
- Kierunkowość tych małych cewek indukcyjnych jest powszechnie ignorowana, a orientacja uzwojenia cewki jest niemożliwa do wywnioskowania, a ponadto jest ona losowo rozłożona na szpuli komponentów. Obudowy większych cewek indukcyjnych często mają oznaczenia biegunowości, jednak nie znaleźliśmy odpowiednich w obudowie o rozmiarze 0806 (2016 metryczny), którą wybraliśmy. W tym celu współpracowaliśmy z Abracon, aby wyprodukować część 3.3 μH z kropką wskazującą biegunowość, a co ważne, na szpuli, na której wszystkie elementy są wyrównane w ten sam sposób. TBD są (lub wkrótce będą) udostępniane ogółowi społeczeństwa przez dystrybutorów. Jak wspomniano wcześniej, zasilanie VREG_AVDD jest bardzo wrażliwe na szumy i dlatego musi być filtrowane. Odkryliśmy, że ponieważ VREG_AVDD pobiera tylko około 200 μA, filtr RC o wartości 33 Ω i 4.7 μF jest wystarczający.
- Podsumowując, użyte komponenty to…
- C6, C7 i C9 – 4.7μF (0402, 1005 metryczne)
- L1 – Abracon TBD (0806, 2016 metryczny)
- R3 – 33Ω (0402, 1005 metryczny)
- Bardziej szczegółowe zalecenia dotyczące rozmieszczenia regulatora można znaleźć w karcie katalogowej RP2350, patrz Wymagania dotyczące podzespołów zewnętrznych i rozmieszczenia płytki PCB.
Zasilanie wejściowe
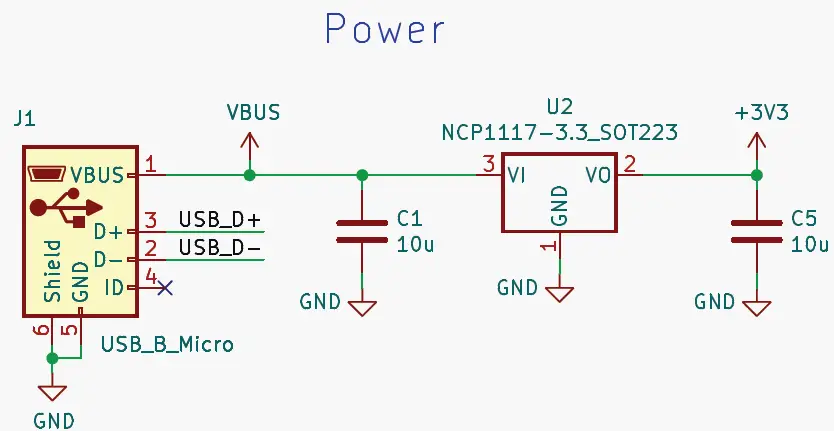
Podłączenie zasilania wejściowego dla tego projektu odbywa się za pomocą 5-woltowego pinu VBUS złącza Micro-USB (oznaczonego jako J1 na rysunku 5). Jest to powszechna metoda zasilania urządzeń elektronicznych i ma sens w tym przypadku, ponieważ RP2350 ma funkcjonalność USB, którą podłączymy do pinów danych tego złącza. Ponieważ do tego projektu potrzebujemy tylko 3.3 V (zasilanie 1.1 V pochodzi z wnętrza), musimy obniżyć przychodzące zasilanie USB 5 V, w tym przypadku używając innego, zewnętrznego wolttagregulator e, w tym przypadku regulator liniowy (znany również jako regulator Low Drop Out, lub LDO). Wcześniej wychwalając zalety stosowania wydajnego regulatora przełączającego, użycie go tutaj również mogłoby być mądrym wyborem, ale wybrałem prostotę. Po pierwsze, użycie LDO jest prawie zawsze łatwiejsze. Nie są wymagane żadne obliczenia, aby ustalić, jaki rozmiar induktora należy zastosować lub jak duże są kondensatory wyjściowe, a układ jest zwykle o wiele bardziej przejrzysty. Po drugie, oszczędzanie każdej ostatniej kropli mocy nie jest tutaj celem; gdyby nim był, poważnie rozważyłbym użycie regulatora przełączającego, a możesz znaleźć example robienia tego na Raspberry Pi Pico 2. I po trzecie, mogę po prostu „pożyczyć” obwód, którego wcześniej użyłem w wersji RP2040 płytki Minimal. Wybrany tutaj NCP1117 (U2) ma stałe wyjście 3.3 V, jest szeroko dostępny i może zapewnić do 1 A prądu, co będzie wystarczające dla większości projektów. Spojrzenie na kartę katalogową NCP1117 mówi nam, że to urządzenie wymaga kondensatora 10 μF na wejściu i kolejnego na wyjściu (C1 i C5).
Kondensatory odsprzęgające
Rysunek 6. Schematyczna sekcja przedstawiająca wejścia zasilacza RP2350, tomtagregulator i kondensatory odsprzęgające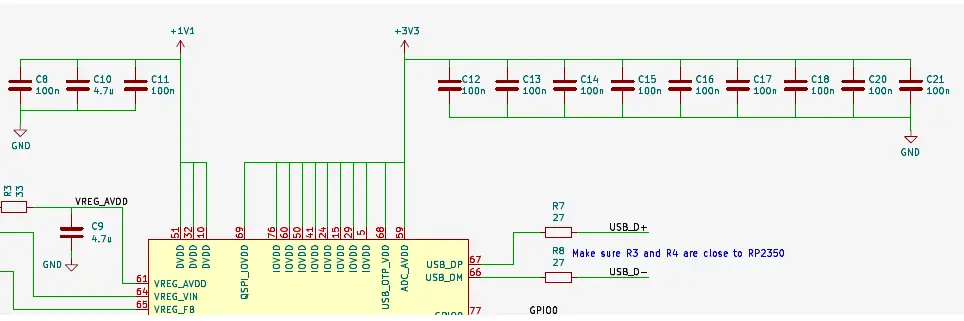
Innym aspektem projektu zasilacza są kondensatory odsprzęgające wymagane dla RP2350. Zapewniają one dwie podstawowe funkcje. Po pierwsze, filtrują szumy zasilania, a po drugie, zapewniają lokalne zasilanie ładunkiem, z którego obwody wewnątrz RP2350 mogą korzystać w krótkim czasie. Zapobiega totage poziom w bezpośrednim sąsiedztwie nie spada zbyt mocno, gdy zapotrzebowanie na prąd nagle wzrasta. Z tego powodu ważne jest, aby umieścić odsprzęganie blisko pinów zasilania. Zazwyczaj zalecamy użycie kondensatora 100nF na pin zasilania, jednak w kilku przypadkach odchodzimy od tej zasady.
Rysunek 7. Przekrój układu pokazujący trasowanie i odsprzęganie RP2350 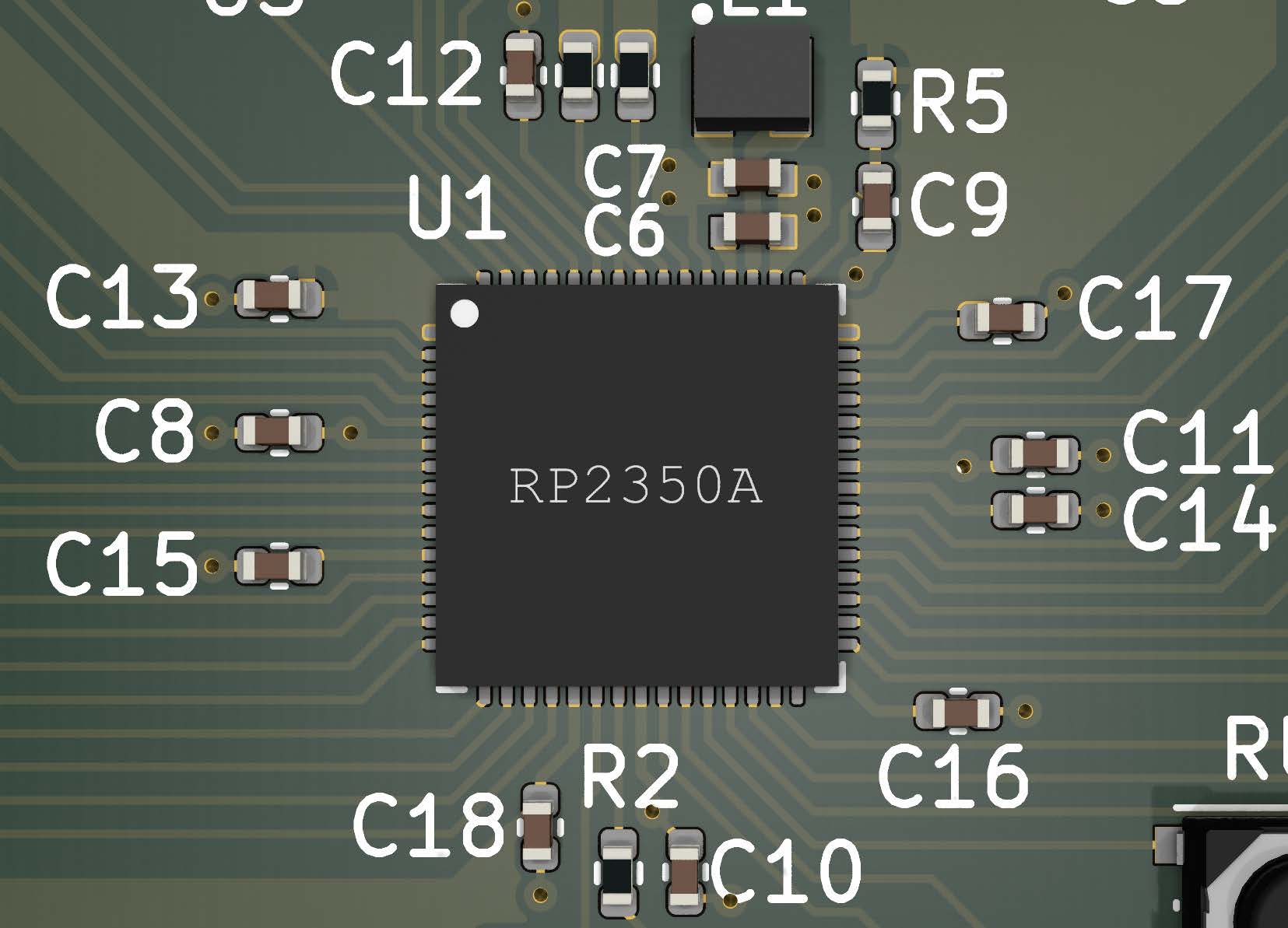
- Po pierwsze, aby mieć wystarczająco dużo miejsca na wyprowadzenie wszystkich pinów układu, z dala od urządzenia, musimy pójść na kompromis z ilością kondensatorów odsprzęgających, których możemy użyć. W tym projekcie piny 53 i 54 układu RP2350A (piny 68 i 69 układu RP2350B) współdzielą jeden kondensator (C12 na rys. 7 i 6), ponieważ po tej stronie urządzenia nie ma zbyt wiele miejsca, a komponenty i układ regulatora mają pierwszeństwo.
- Ten brak miejsca można by nieco przezwyciężyć, gdybyśmy użyli bardziej złożonej/droższej technologii, takiej jak mniejsze komponenty lub czterowarstwowa płytka PCB z komponentami zarówno na górze, jak i na dole. Jest to kompromis projektowy; zmniejszyliśmy złożoność i koszt, kosztem mniejszej pojemności odsprzęgającej i kondensatorów, które są nieco dalej od układu niż jest to optymalne (co zwiększa indukcyjność). Może to mieć wpływ na ograniczenie maksymalnej prędkości, z jaką projekt mógłby działać, ponieważ objętośćtagZasilanie może być zbyt głośne i spaść poniżej minimalnej dozwolonej objętościtage; jednak w większości zastosowań taki kompromis powinien być akceptowalny.
- Innym odstępstwem od reguły 100nF jest możliwość dalszej poprawy objętościtagwydajność regulatora; zalecamy użycie 4.7μF dla C10, który jest umieszczony po drugiej stronie układu scalonego od regulatora.
Rozdział 3. Pamięć Flash
Podstawowa lampa błyskowa
Rysunek 8. Schematyczna sekcja pokazująca główną pamięć flash i obwody USB_BOOT
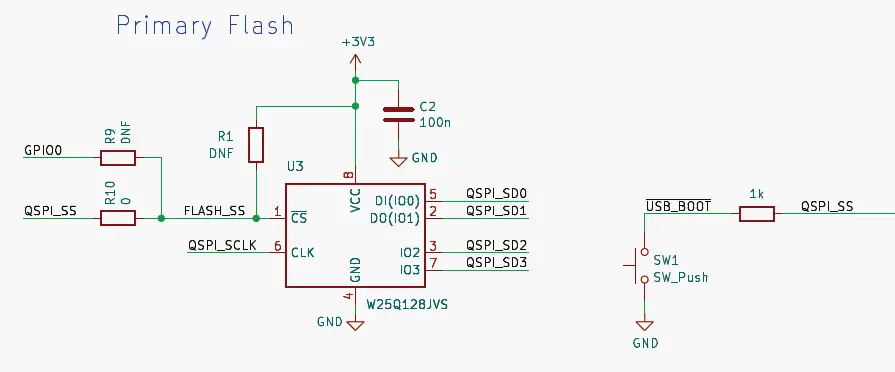
- Aby móc przechowywać kod programu, z którego RP2350 może się uruchomić i działać, musimy użyć pamięci flash, konkretnie pamięci flash quad SPI. Wybranym tutaj urządzeniem jest układ W25Q128JVS (U3 na rysunku 8), który jest układem 128 Mbit (16 MB). Jest to największy rozmiar pamięci obsługiwany przez RP2350. Jeśli Twoja konkretna aplikacja nie potrzebuje tak dużej ilości pamięci, można zamiast tego użyć mniejszej, tańszej pamięci.
- Ponieważ ta magistrala danych może mieć dość wysoką częstotliwość i jest regularnie używana, piny QSPI układu RP2350 powinny być podłączone bezpośrednio do pamięci flash, przy użyciu krótkich połączeń, aby zachować integralność sygnału, a także zmniejszyć przesłuch w otaczających obwodach. Przesłuch występuje, gdy sygnały w jednej sieci obwodów mogą indukować niepożądane przesłuchy.tagznajdują się na sąsiednim obwodzie, co może potencjalnie powodować występowanie błędów.
- Sygnał QSPI_SS jest przypadkiem szczególnym. Jest on podłączony bezpośrednio do pamięci flash, ale ma też dwa rezystory (właściwie cztery, ale o tym później) do niego podłączone. Pierwszy (R1) to rezystor podciągający do zasilania 3.3 V. Pamięć flash wymaga, aby wejście chip-select było na tym samym poziomie głośności.tage jako własny pin zasilania 3.3 V, gdy urządzenie jest zasilane, w przeciwnym razie nie działa ono prawidłowo. Gdy RP2350 jest zasilany, jego pin QSPI_SS automatycznie domyślnie przechodzi w stan podciągania, ale jest krótki okres czasu podczas włączania, w którym stan pinu QSPI_SS nie może być zagwarantowany. Dodanie rezystora podciągającego zapewnia, że ten wymóg zawsze będzie spełniony. R1 jest oznaczony jako DNF (Do Not Fit) na schemacie, ponieważ odkryliśmy, że w przypadku tego konkretnego urządzenia flash zewnętrzny rezystor podciągający jest niepotrzebny. Jednak jeśli używana jest inna pamięć flash, może okazać się ważne, aby móc wstawić tutaj rezystor 10 kΩ, więc został on uwzględniony na wszelki wypadek.
- Drugi rezystor (R6) to rezystor 1 kΩ, podłączony do przycisku (SW1) oznaczonego jako „USB_BOOT”. Dzieje się tak, ponieważ pin QSPI_SS jest używany jako „pasek rozruchowy”; RP2350 sprawdza wartość tego wejścia/wyjścia podczas sekwencji rozruchowej i jeśli okaże się, że jest to logiczne 0, RP2350 powraca do trybu BOOTSEL, w którym RP2350 prezentuje się jako urządzenie pamięci masowej USB, a kod można skopiować bezpośrednio do niego. Jeśli po prostu naciśniemy przycisk, zerwiemy pin QSPI_SS do masy, a jeśli urządzenie zostanie następnie zresetowane (np. przez przełączenie pinu RUN), RP2350 uruchomi się ponownie w trybie BOOTSEL zamiast próbować uruchomić zawartość pamięci flash. Te rezystory, R2 i R6 (również R9 i R10), powinny być umieszczone blisko układu flash, dzięki czemu unikniemy dodatkowych długości ścieżek miedzianych, które mogłyby wpłynąć na sygnał.
- Wszystko powyższe dotyczy konkretnie RP2350, który nie ma wewnętrznej pamięci flash. Oczywiście urządzenia RP2354 mają wewnętrzną pamięć flash 2 MB, więc zewnętrzna pamięć U3 nie jest wymagana, więc U3 można bezpiecznie usunąć ze schematu lub po prostu pozostawić niezapełnioną. W obu tych przypadkach nadal chcielibyśmy zachować przełącznik USB_BOOT podłączony do QSPI_SS, abyśmy nadal mogli przejść do trybu rozruchu USB.
Pamięć flash wtórna lub PSRAM
- Seria RP235x obsługuje teraz drugie urządzenie pamięci wykorzystujące te same piny QSPI, z GPIO zapewniającym dodatkowy wybór układu. Tak więc, jeśli używamy RP2354 (który ma wewnętrzną pamięć flash), moglibyśmy użyć U3 jako dodatkowej pamięci flash, a nawet zastąpić ją urządzeniem PSRAM. Aby to zrobić, musimy odłączyć QSPI_SS od U3 i zamiast tego podłączyć go do odpowiedniego GPIO. Najbliższym GPIO, które może być wyborem układu (XIP_CS1n), jest GPIO0, więc usuwając 0Ω z R10 i dopasowując go do R9, możemy teraz uzyskać dostęp do U3 oprócz wbudowanej pamięci flash. Aby w pełni wykorzystaćtagW związku z tą funkcją, w której zastosowano dwa zewnętrzne układy pamięci, tak aby mogły z nich korzystać elementy RP2350 bez pamięci flash, większa z dwóch płyt Minimal, przeznaczona do RP2350B, zawiera opcjonalną przestrzeń (U4) na dodatkowy układ pamięci.
Rysunek 9. Schematyczna sekcja przedstawiająca opcjonalne urządzenie pamięci dodatkowej
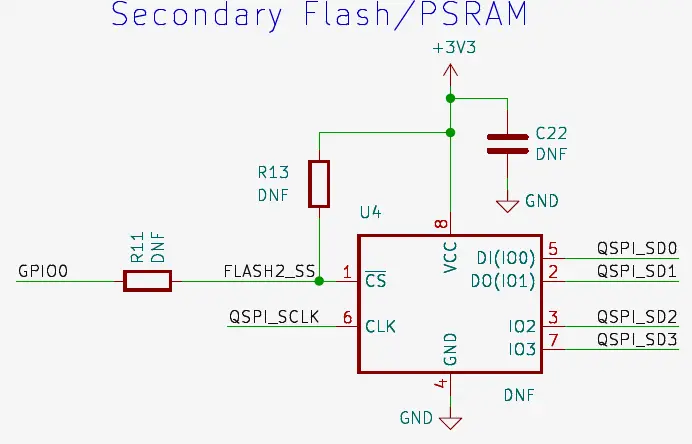
Aby móc używać tego urządzenia, musi ono być oczywiście wypełnione, podobnie jak R11 (0Ω) i R13 (10KΩ). Dodanie R11 łączy GPIO0 (sygnał XIP_CS1n) z chip select drugiej pamięci. Podciąganie na pinie chip select jest zdecydowanie potrzebne tym razem, ponieważ domyślny stan GPIO0 ma być obniżony podczas włączania zasilania, co spowodowałoby awarię naszego urządzenia flash. C22 byłby również potrzebny do zapewnienia lokalnego odsprzęgnięcia zasilania dla U4.
Obsługiwane układy flash
Początkowa sekwencja sondy błyskowej, używana przez spód do wyodrębnienia drugiego stage z pamięci flash, używa polecenia odczytu szeregowego 03h z 24-bitowym adresowaniem i zegarem szeregowym o częstotliwości około 1 MHz. Powtarza cyklicznie cztery kombinacje polaryzacji zegara i fazy zegara, szukając prawidłowego drugiego stagSuma kontrolna CRC32.
Jako drugitage może następnie skonfigurować funkcję execute-in-place przy użyciu tego samego polecenia 03h serial read, RP2350 może wykonywać cached flash execute-in-place z dowolnym chipem obsługującym 03h serial read z 24-bitowym adresowaniem, co obejmuje większość urządzeń flash serii 25. Zestaw SDK zapewnia exampdruga stage dla CPOL=0 CPHA=0, w https://github.com/raspberrypi/pico-sdk/blob/master/src/rp2350/boot_stage2/boot2_generic_03h.SAby obsługiwać programowanie flash za pomocą procedur na dole, urządzenie musi również odpowiadać na następujące polecenia:
- 02h 256-bajtowy program strony
- 05h status rejestru odczytany
- 06h ustaw zatrzask umożliwiający zapis
- 20h 4kB usuwanie sektora
RP2350 obsługuje również szeroką gamę trybów dostępu dual-SPI i QSPI. Na przykładampLe, https://github.com/raspberrypi/pico-sdk/blob/master/src/rp2350/boot_stage2/boot2_w25q080.S konfiguruje urządzenie Winbond serii W25Q do trybu ciągłego odczytu quad-IO, w którym RP2350 wysyła adresy quad-IO (bez prefiksu polecenia), a pamięć flash odpowiada danymi quad-IO.
Należy zachować ostrożność w przypadku trybów flash XIP, w których urządzenie flash przestaje reagować na standardowe polecenia szeregowe, takie jak tryb ciągłego odczytu Winbond wspomniany powyżej. Może to powodować problemy, gdy RP2350 zostanie zresetowany, ale urządzenie flash nie zostanie wyłączone i ponownie uruchomione, ponieważ flash nie będzie wówczas reagował na sekwencję sondy flash bootrom. Przed wydaniem odczytu szeregowego 03h bootrom zawsze wydaje następującą stałą sekwencję, która jest sekwencją o najlepszym wysiłku w celu przerwania XIP w zakresie urządzeń flash:
- CSn=1, IO[3:0]=4'b0000 (poprzez pulldowny w celu uniknięcia konfliktów), wydaj zegary ×32
- CSn=0, IO[3:0]=4'b1111 (poprzez podciągnięcia w celu uniknięcia rywalizacji), wydaj zegary ×32
- CSn=1
- CSn=0, MOSI=1'b1 (sterowane low-Z, wszystkie inne wejścia/wyjścia Hi-Z), wystawiają zegary ×16
Jeżeli wybrane urządzenie nie reaguje na tę sekwencję w trybie ciągłego odczytu, należy je utrzymywać w stanie, w którym każdy transfer jest poprzedzony poleceniem szeregowym. W przeciwnym razie urządzenie RP2350 nie będzie mogło odzyskać sprawności po wewnętrznym resecie.
Więcej szczegółów na temat QSPI można znaleźć w karcie danych RP2350 poświęconej interfejsowi pamięci QSPI (QMI).
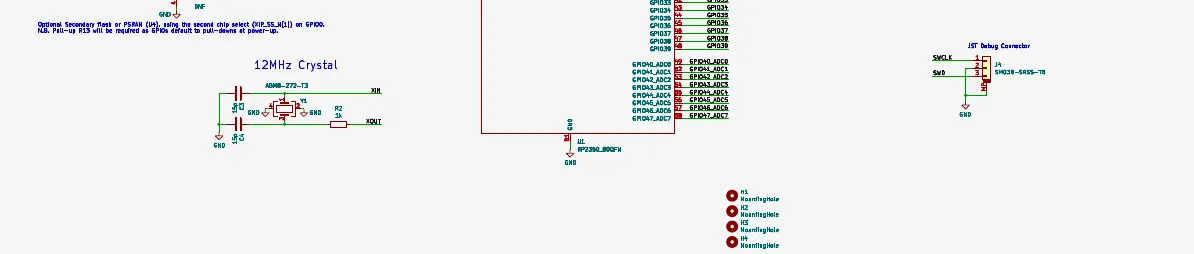
Rozdział 4. Oscylator kwarcowy
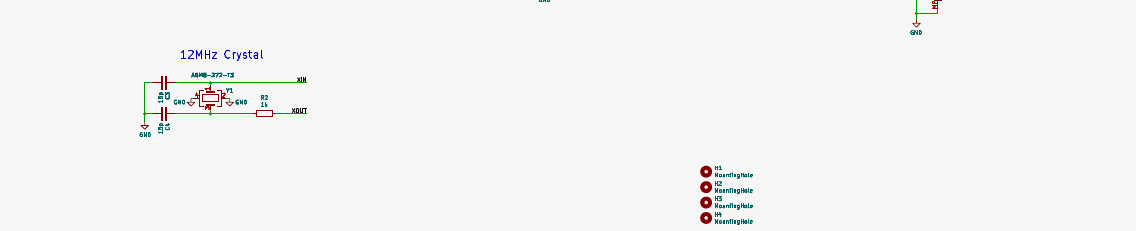
Rysunek 10. Schematyczna sekcja pokazująca oscylator kwarcowy i kondensatory obciążeniowe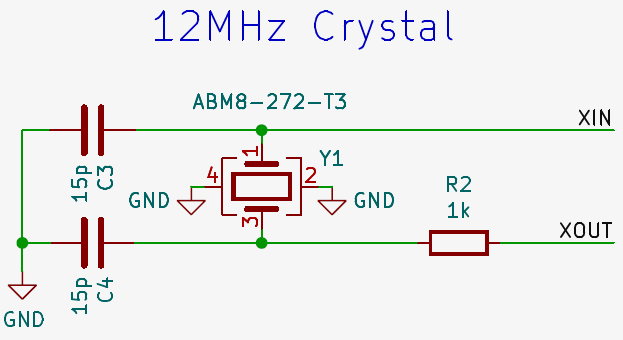
- Ściśle rzecz biorąc, RP2350 nie wymaga zewnętrznego źródła zegara, ponieważ ma własny wewnętrzny oscylator. Jednak częstotliwość tego wewnętrznego oscylatora nie jest dobrze zdefiniowana ani kontrolowana, różni się w zależności od układu scalonego, a także w zależności od różnej objętości zasilania.tages i temperatur, zaleca się stosowanie stabilnego zewnętrznego źródła częstotliwości. Aplikacje, które opierają się na dokładnych częstotliwościach, nie są możliwe bez zewnętrznego źródła częstotliwości, USB jest pierwszym źródłemample.
- Zapewnienie zewnętrznego źródła częstotliwości może się odbyć na jeden z dwóch sposobów: albo poprzez zapewnienie źródła zegara z wyjściem CMOS (fala kwadratowa o objętości IOVDD),tage) do pinu XIN lub za pomocą podłączonego pomiędzy nimi kwarcu 12MHz
- XIN i XOUT. Preferowaną opcją jest użycie kryształu, ponieważ oba są stosunkowo tanie i bardzo dokładne.
- Wybrany kryształ do tego projektu to ABM8-272-T3 (Y1 na Rysunku 10). Jest to ten sam kryształ 12MHz, który jest używany w Raspberry Pi Pico i Raspberry Pi Pico 2. Zdecydowanie zalecamy używanie tego kryształu wraz z towarzyszącym mu obwodem, aby zapewnić szybkie uruchomienie zegara w każdych warunkach bez uszkodzenia samego kryształu. Kryształ ma tolerancję częstotliwości 30 ppm, co powinno być wystarczające dla większości zastosowań. Oprócz tolerancji częstotliwości +/-30 ppm ma maksymalny ESR 50Ω i pojemność obciążenia 10pF, co miało wpływ na wybór towarzyszących komponentów.
- Aby kryształ mógł oscylować z pożądaną częstotliwością, producent określa pojemność obciążenia, która jest mu potrzebna, aby to zrobić, a w tym przypadku jest to 10 pF. Tę pojemność obciążenia uzyskuje się, umieszczając dwa kondensatory o równej wartości, po jednym z każdej strony kryształu do uziemienia (C3 i C4). Z punktu widzenia kryształu view, te kondensatory są połączone szeregowo między dwoma zaciskami. Podstawowa teoria obwodów mówi nam, że łączą się, aby dać pojemność (C3*C4)/(C3+C4), a ponieważ C3=C4, to jest to po prostu C3/2. W tym przykładzieample, użyliśmy kondensatorów 15pF, więc połączenie szeregowe wynosi 7.5pF. Oprócz tej zamierzonej pojemności obciążenia, musimy również dodać wartość dla niezamierzonej dodatkowej pojemności, lub pojemności pasożytniczej, którą otrzymujemy ze ścieżek PCB i pinów XIN i XOUT RP2350. Przyjmiemy wartość 3pF dla tego, a ponieważ ta pojemność jest równoległa do C3 i C4, po prostu dodamy to, aby uzyskać całkowitą pojemność obciążenia 10.5pF, co jest wystarczająco blisko celu 10pF. Jak widać, pojemność pasożytnicza ścieżek PCB jest czynnikiem, dlatego musimy zachować je małe, aby nie zaburzyć kryształu i nie zatrzymać jego oscylacji zgodnie z przeznaczeniem. Staraj się, aby układ był jak najkrótszy.
- Drugim czynnikiem jest maksymalny ESR (równoważny szeregowy opór) kryształu. Wybraliśmy urządzenie o maksymalnym 50Ω, ponieważ odkryliśmy, że to, wraz z szeregowym rezystorem 1kΩ (R2), jest dobrą wartością, aby zapobiec przesterowaniu kryształu i jego uszkodzeniu przy użyciu poziomu IOVDD 3.3 V. Jednak jeśli IOVDD jest mniejsze niż 3.3 V, prąd sterujący pinów XIN/XOUT jest zmniejszony i okaże się, że amptemperatura kryształu jest niższa lub może w ogóle nie oscylować. W takim przypadku konieczne będzie użycie mniejszej wartości rezystora szeregowego. Wszelkie odchylenia od obwodu kryształu pokazanego tutaj lub z poziomem IOVDD innym niż 3.3 V będą wymagały obszernych testów, aby upewnić się, że kryształ oscyluje w każdych warunkach i uruchamia się wystarczająco szybko, aby nie powodować problemów z aplikacją.
Zalecany kryształ
- W przypadku oryginalnych projektów wykorzystujących RP2350 zalecamy stosowanie Abracon ABM8-272-T3. Na przykładample, oprócz minimalnego projektu exampzobacz schemat płytki Pico 2 w załączniku B do karty katalogowej Raspberry Pi Pico 2 i projekt Pico 2 files.
- Aby uzyskać najlepszą wydajność i stabilność w typowych zakresach temperatur roboczych, użyj Abracon ABM8-272-T3. Możesz kupić ABM8-272-T3 bezpośrednio od Abracon lub od autoryzowanego sprzedawcy. Pico 2 został specjalnie dostrojony do ABM8-272-T3, który ma następujące specyfikacje:
- Nawet jeśli użyjesz kryształu o podobnych parametrach, będziesz musiał przetestować obwód w szerokim zakresie temperatur, aby upewnić się, że jest stabilny.
- Oscylator kwarcowy zasilany jest z wolumenu IOVDDtage. W rezultacie kryształ Abracon i ten konkretny damprezystory są dostrojone do pracy przy napięciu 3.3 V. Jeśli używasz innego wolumenu IOtage, będziesz musiał ponownie dostroić.
- Wszelkie zmiany parametrów kryształu stwarzają ryzyko niestabilności wszystkich komponentów podłączonych do obwodu kryształu.
- Jeśli nie możesz nabyć zalecanego kryształu bezpośrednio od Abracon lub odsprzedawcy, skontaktuj się z nami aplikacje@raspberrypi.com.
Rozdział 5. IO
USB
Rysunek 11. Schematyczna sekcja pokazująca piny USB układu RP2350 i zakończenie szeregowe
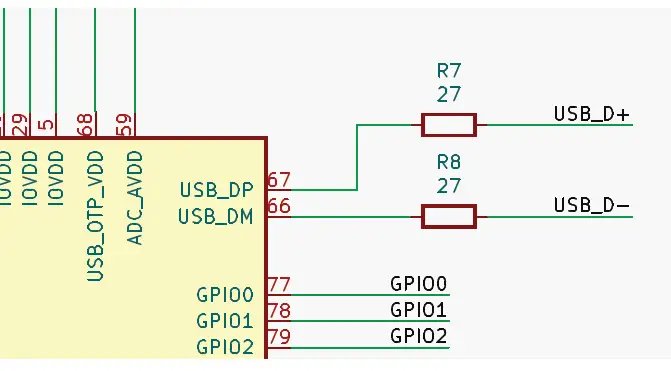
- RP2350 zapewnia dwa piny do wykorzystania dla pełnej prędkości (FS) lub niskiej prędkości (LS) USB, jako host lub urządzenie, w zależności od używanego oprogramowania. Jak już omówiliśmy, RP2350 może również uruchomić się jako urządzenie pamięci masowej USB, więc podłączenie tych pinów do złącza USB (J1 na rysunku 5) ma sens. Piny USB_DP i USB_DM w RP2350 nie wymagają żadnych dodatkowych pull-upów ani pull-downów (wymaganych do wskazania prędkości, FS lub LS lub tego, czy jest to host czy urządzenie), ponieważ są one wbudowane w wejścia/wyjścia. Jednak te wejścia/wyjścia wymagają 27Ω rezystorów terminujących szeregowo (R7 i R8 na rysunku 11), umieszczonych blisko układu, aby spełnić specyfikację impedancji USB.
- Mimo że układ RP2350 jest ograniczony do pełnej szybkości transmisji danych (12 Mb/s), powinniśmy upewnić się, że charakterystyczna impedancja linii transmisyjnych (ścieżki miedziane łączące układ scalony ze złączem) jest zbliżona do
- Specyfikacja USB 90Ω (mierzona różnicowo). Na płytce o grubości 1 mm, takiej jak ta, jeśli użyjemy ścieżek o szerokości 0.8 mm na USB_DP i USB_DM, z przerwą 0.15 mm między nimi, powinniśmy uzyskać różnicową impedancję charakterystyczną około 90Ω. Ma to zapewnić, że sygnały mogą przemieszczać się wzdłuż tych linii transmisyjnych tak czysto, jak to możliwe, minimalizując objętośćtage odbicia, które mogą zmniejszyć integralność sygnału. Aby te linie transmisyjne działały prawidłowo, musimy się upewnić, że bezpośrednio pod tymi liniami znajduje się uziemienie. Solidny, nieprzerwany obszar miedzianej uziemienia, rozciągający się na całej długości ścieżki. W tym projekcie prawie cała dolna warstwa miedzi jest poświęcona uziemieniu, a szczególną uwagę poświęcono temu, aby ścieżki USB przechodziły tylko nad uziemieniem. Jeśli do budowy wybrano płytkę PCB grubszą niż 1 mm, mamy dwie opcje. Możemy przeprojektować linie transmisyjne USB, aby zrekompensować większą odległość między ścieżką a uziemieniem (co może być fizycznie niemożliwe) lub możemy to zignorować i mieć nadzieję na najlepsze. USB FS może być dość wyrozumiały, ale Twoje wyniki mogą się różnić. Prawdopodobnie będzie działać w wielu aplikacjach, ale prawdopodobnie nie będzie zgodny ze standardem USB.
Nagłówki we/wy
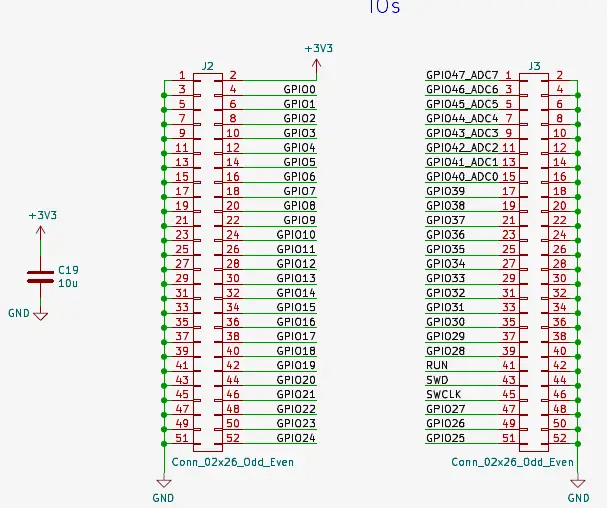
Rysunek 12. Schematyczna sekcja pokazująca złącza I/O 2.54 mm wersji QFN60
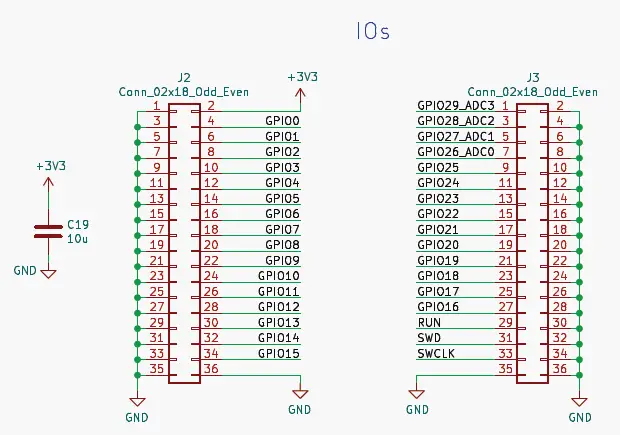
- Oprócz wspomnianego już złącza USB, istnieje para dwurzędowych złączy 2.54 mm (J2 i J3 na Rysunku 12), po jednym z każdej strony płytki, do których podłączono resztę I/O. Na RP30A jest 2350 GPIO, podczas gdy na RP48B jest 2350 GPIO, więc złącza na tej wersji płytki Minimal są większe, aby pomieścić dodatkowe piny (patrz Rysunek 13).
- Ponieważ jest to projekt ogólnego przeznaczenia, bez konkretnego zastosowania, wejścia/wyjścia zostały udostępnione do podłączenia zgodnie z życzeniem użytkownika. Wewnętrzny rząd pinów na każdym złączu to wejścia/wyjścia, a zewnętrzny rząd jest podłączony do uziemienia. Dobrą praktyką jest uwzględnienie wielu uziemień na złączach wejścia/wyjścia. Pomaga to utrzymać uziemienie o niskiej impedancji, a także zapewnia wiele potencjalnych ścieżek powrotnych dla prądów przepływających do i z
- Połączenia I/O. Jest to ważne, aby zminimalizować zakłócenia elektromagnetyczne, które mogą być spowodowane przez prądy powrotne szybko przełączających się sygnałów, które pokonują długie, pętlowe ścieżki, aby zamknąć obwód.
- Oba złącza znajdują się na tej samej siatce 2.54 mm, co ułatwia podłączanie tej płytki do innych rzeczy, takich jak płytki stykowe. Możesz rozważyć zamontowanie tylko złącza jednorzędowego zamiast złącza dwurzędowego, rezygnując z zewnętrznego rzędu połączeń uziemiających, aby ułatwić montaż na płytce stykowej.
Rysunek 13. Schematyczna sekcja pokazująca złącza I/O 2.54 mm wersji QFN80
Złącze debugowania
Rysunek 14. Schematyczna sekcja przedstawiająca opcjonalne złącze JST do debugowania SWD
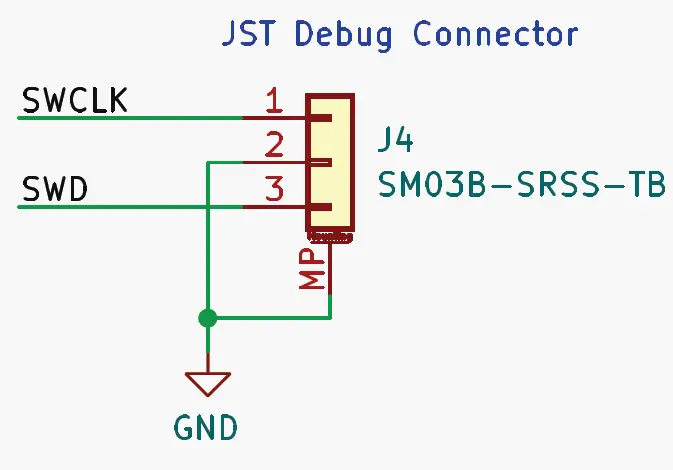
Do debugowania na układzie scalonym możesz chcieć połączyć się z interfejsem SWD RP2350. Dwa piny, SWD i SWCLK, są dostępne na 2.54-milimetrowym złączu J3, aby umożliwić łatwe podłączenie sondy debugowania. Oprócz tego dołączyłem opcjonalne złącze JST, które umożliwia łatwe podłączenie do sondy debugowania Raspberry Pi. Nie musisz go używać, złącza 2.54-milimetrowe wystarczą, jeśli zamierzasz debugować oprogramowanie, ale uważam, że jest to wygodniejsze. Wybrałem złącze poziome, głównie dlatego, że podoba mi się jego wygląd, nawet jeśli nie znajduje się na krawędzi płytki, ale dostępne są złącza pionowe, choć o nieco innym odcisku.
Pikolak
Wersja Minimal zawiera teraz nie jeden, a dwa przyciski, podczas gdy wersja RP240 nie miała żadnego. Jeden służy do wyboru rozruchu USB, jak już wcześniej omawialiśmy, ale drugi to przycisk „reset”, podłączony do pinu RUN. Żaden z nich nie jest absolutnie konieczny (chociaż przycisk BOOTSEL musiałby zostać zastąpiony nagłówkiem lub czymś podobnym, gdyby wymagany był tryb rozruchu USB) i można go usunąć, jeśli przestrzeń lub koszt są problemem, ale z pewnością sprawiają, że korzystanie z RP2350 jest o wiele przyjemniejsze.
Załącznik A: Kompletny schemat - wersja RP2350A
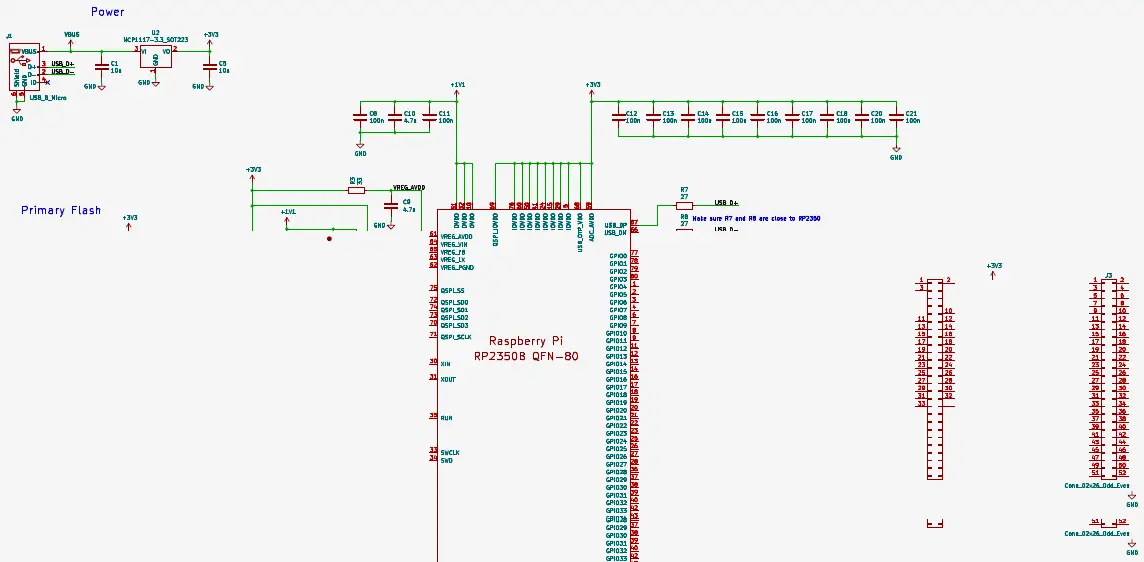
Rysunek 15. Pełny schemat projektu minimalnego dla RP2350A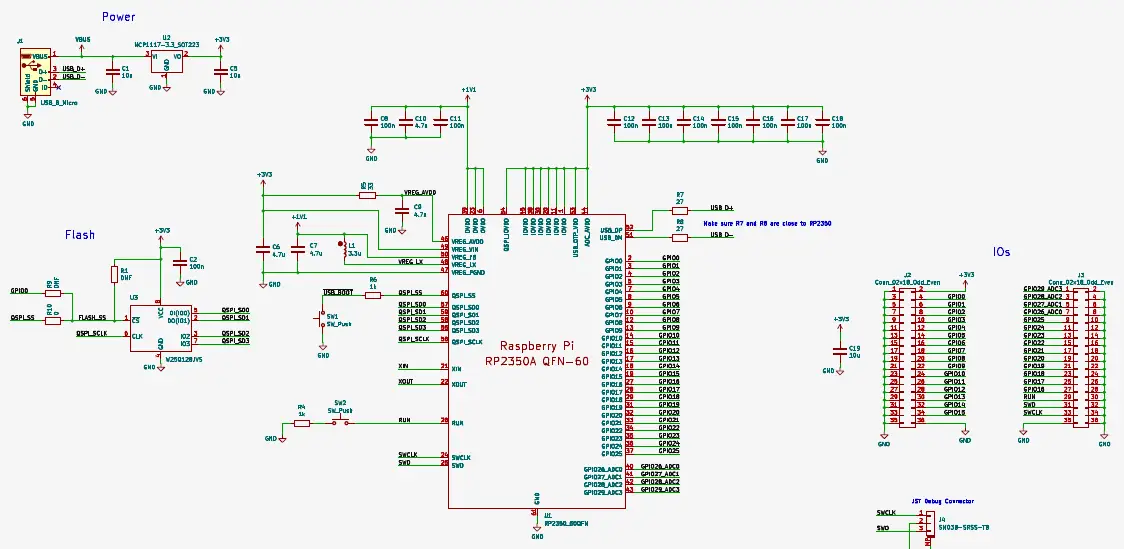
Załącznik B: Kompletny schemat - wersja RP2350B
Rysunek 16. Pełny schemat projektu Minimal dla RP2350B
Załącznik H: Historia wydań dokumentacji
8 sierpnia 2024
Pierwsze wydanie.
i Raspberry Pi
Raspberry Pi jest znakiem towarowym Raspberry Pi Ltd.
Raspberry Pi spółka z ograniczoną odpowiedzialnością
Dokumenty / Zasoby
 |
Raspberry Pi SC1631 Mikrokontroler Raspberry [plik PDF] Instrukcja obsługi Mikrokontroler Raspberry SC1631, SC1631, Mikrokontroler Raspberry, Mikrokontroler |



