ຫ້ອງສະໝຸດການຮັບຮູ້ການເຄື່ອນໄຫວ STMicroelectronics UM2193 MotionAR
ແນະນຳ
Motion AR ແມ່ນສ່ວນໜຶ່ງຂອງຫ້ອງສະໝຸດກາງຂອງຊອບແວ X-CUBE-MEMS1 ແລະເຮັດວຽກຢູ່ STM32. ມັນສະຫນອງຂໍ້ມູນໃນເວລາທີ່ແທ້ຈິງກ່ຽວກັບປະເພດຂອງກິດຈະກໍາທີ່ປະຕິບັດໂດຍຜູ້ໃຊ້. ມັນສາມາດຈໍາແນກກິດຈະກໍາດັ່ງຕໍ່ໄປນີ້: stationary, ການຍ່າງ, ການຍ່າງໄວ, jogging, ລົດຖີບ, ຂັບລົດ.
ຫ້ອງສະໝຸດນີ້ມີຈຸດປະສົງເພື່ອເຮັດວຽກກັບ ST MEMS ເທົ່ານັ້ນ.
ສູດການຄິດໄລ່ແມ່ນສະໜອງໃຫ້ໃນຮູບແບບຫ້ອງສະໝຸດສະຖິດ ແລະຖືກອອກແບບມາເພື່ອໃຊ້ໃນ STM32 microcontrollers ໂດຍອີງໃສ່ສະຖາປັດຕະຍະກຳ ARM® Cortex®-M3, ARM® Cortex®-M33, ARM® Cortex®-M4 ຫຼື ARM® Cortex®-M7.
ມັນຖືກສ້າງຂຶ້ນເທິງສຸດຂອງເຕັກໂນໂລຊີຊອບແວ STM32Cube ທີ່ຊ່ວຍຜ່ອນການເຄື່ອນທີ່ໃນທົ່ວ microcontrollers STM32 ທີ່ແຕກຕ່າງກັນ.
ຊອບແວທີ່ມາພ້ອມກັບ sampການປະຕິບັດທີ່ດໍາເນີນການຢູ່ໃນກະດານຂະຫຍາຍ X-NUCLEO-IKS01A3 ຫຼື X-NUCLEO-IKS4A1 ໃນກະດານພັດທະນາ NUCLEO-F401RE, NUCLEO-L152RE ຫຼື NUCLEO-U575ZI-Q.
ຕົວຫຍໍ້ ແລະຕົວຫຍໍ້
ຕາຕະລາງ 1. ບັນຊີລາຍຊື່ຂອງຕົວຫຍໍ້
| ຕົວຫຍໍ້ | ລາຍລະອຽດ |
| API | ການໂຕ້ຕອບການຂຽນໂປລແກລມແອັບພລິເຄຊັນ |
| BSP | ຊຸດສະຫນັບສະຫນູນກະດານ |
| GUI | ການໂຕ້ຕອບຜູ້ໃຊ້ແບບກາຟິກ |
| HAL | ຊັ້ນ abstraction ຮາດແວ |
| IDE | ສະພາບແວດລ້ອມການພັດທະນາແບບປະສົມປະສານ |
ຫ້ອງສະໝຸດ Motion AR Middleware ໃນການຂະຫຍາຍຊອບແວ X-CUBE-MEMS1
ຍ້າຍ AR ໄປview
ຫ້ອງສະໝຸດ Motion AR ຂະຫຍາຍການເຮັດວຽກຂອງຊອບແວ X-CUBE-MEMS1.
ຫ້ອງສະຫມຸດໄດ້ມາຂໍ້ມູນຈາກ accelerometer ແລະສະຫນອງຂໍ້ມູນກ່ຽວກັບປະເພດຂອງກິດຈະກໍາທີ່ປະຕິບັດໂດຍຜູ້ໃຊ້.
ຫ້ອງສະຫມຸດໄດ້ຖືກອອກແບບສໍາລັບ ST MEMS ເທົ່ານັ້ນ. ການທໍາງານແລະການປະຕິບັດໃນເວລາທີ່ການນໍາໃຊ້ເຊັນເຊີ MEMS ອື່ນໆບໍ່ໄດ້ຖືກວິເຄາະແລະສາມາດແຕກຕ່າງກັນຢ່າງຫຼວງຫຼາຍຈາກສິ່ງທີ່ອະທິບາຍໄວ້ໃນເອກະສານ.
Sample ການປະຕິບັດແມ່ນມີຢູ່ໃນກະດານຂະຫຍາຍ X-NUCLEO-IKS01A3 ຫຼື X-NUCLEO-IKS4A1, ຕິດຕັ້ງຢູ່ໃນກະດານພັດທະນາ NUCLEO-F401RE, NUCLEO-L152RE ຫຼື NUCLEO-U575ZI-Q.
Motion AR ຫ້ອງສະໝຸດ
ຂໍ້ມູນດ້ານວິຊາການທີ່ອະທິບາຍຢ່າງຄົບຖ້ວນກ່ຽວກັບໜ້າທີ່ ແລະພາລາມິເຕີຂອງ Motion AR APIs ສາມາດພົບໄດ້ຢູ່ໃນ HTML ທີ່ຮວບຮວມ MotionAR_Package.chm file ຕັ້ງຢູ່ໃນໂຟເດີເອກະສານ.
ລາຍລະອຽດຫ້ອງສະໝຸດ Motion AR
- ຫ້ອງສະໝຸດການຮັບຮູ້ການເຄື່ອນໄຫວ AR ຈັດການຂໍ້ມູນທີ່ໄດ້ມາຈາກເຄື່ອງວັດແທກຄວາມເລັ່ງ; ມັນມີລັກສະນະ:
- ຄວາມເປັນໄປໄດ້ທີ່ຈະຈໍາແນກກິດຈະກໍາດັ່ງຕໍ່ໄປນີ້: stationary, ການຍ່າງ, ການຍ່າງໄວ, jogging, ຖີບລົດ, ຂັບລົດ.
- ການຮັບຮູ້ໂດຍອີງໃສ່ຂໍ້ມູນ accelerometer ເທົ່ານັ້ນ
- ຂໍ້ມູນ accelerometer ທີ່ຕ້ອງການ sampຄວາມຖີ່ຂອງສາຍ: 16 Hz
- ຄວາມຕ້ອງການຊັບພະຍາກອນ:
- Cortex-M3: 8.5 kB ຂອງລະຫັດແລະ 1.4 kB ຂອງຫນ່ວຍຄວາມຈໍາຂໍ້ມູນ
- Cortex-M33: 7.8 kB ຂອງລະຫັດແລະ 1.4 kB ຂອງຫນ່ວຍຄວາມຈໍາຂໍ້ມູນ
- Cortex-M4: 7.9 kB ຂອງລະຫັດແລະ 1.4 kB ຂອງຫນ່ວຍຄວາມຈໍາຂໍ້ມູນ
- Cortex-M7: 8.1 kB ຂອງລະຫັດແລະ 1.4 kB ຂອງຫນ່ວຍຄວາມຈໍາຂໍ້ມູນ
- ມີໃຫ້ສໍາລັບສະຖາປັດຕະຍະກໍາ ARM Cortex-M3, Cortex-M33, Cortex-M4 ແລະ Cortex-M7
MotionAR APIs
MotionAR APIs ແມ່ນ:
- uint8_t MotionAR_GetLibVersion(char *version)
- ດຶງເອົາສະບັບຂອງຫ້ອງສະຫມຸດ
- * ຮຸ່ນແມ່ນຕົວຊີ້ໄປຫາ array ຂອງ 35 ຕົວອັກສອນ
- ຕອບຈໍານວນຕົວອັກສອນໃນສະຕຣິງເວີຊັນ
- MotionAR_Initialize(void)
- ປະຕິບັດການເລີ່ມຕົ້ນຫ້ອງສະຫມຸດ MotionAR ແລະການຕິດຕັ້ງກົນໄກພາຍໃນ
- ໂມດູນ CRC ໃນ STM32 microcontroller (ໃນ RCC ໂມງ peripheral ເປີດລົງທະບຽນ) ຕ້ອງມີ
ເປີດໃຊ້ກ່ອນນຳໃຊ້ຫ້ອງສະໝຸດ
ໝາຍເຫດ: ຟັງຊັນນີ້ຕ້ອງຖືກເອີ້ນກ່ອນທີ່ຈະໃຊ້ຫ້ອງສະໝຸດການປັບຕົວເລັ່ງຄວາມໄວ.
- MotionAR_Reset(void)
- ຣີເຊັດສູດການຮັບຮູ້ການເຄື່ອນໄຫວ
- MotionAR_Update(MAR_input_t *data_in, MAR_output_t *data_out, int64_t ເປັນໂມຄະ
ເວລາທີ່ສຸດamp)- ປະຕິບັດຂັ້ນຕອນການຮັບຮູ້ກິດຈະກໍາ
- *data_in ພາຣາມິເຕີແມ່ນຕົວຊີ້ໄປຫາໂຄງສ້າງທີ່ມີຂໍ້ມູນປ້ອນເຂົ້າ
- ຕົວກໍານົດການສໍາລັບໂຄງສ້າງປະເພດ MAR_input_t ແມ່ນ:
- acc_x ແມ່ນຄ່າເຊັນເຊີ accelerometer ໃນແກນ X ໃນ g
- acc_y ແມ່ນຄ່າເຊັນເຊີ accelerometer ໃນແກນ Y ໃນ g
- acc_z ແມ່ນຄ່າເຊັນເຊີ accelerometer ໃນແກນ Z ໃນ g
- *data_out ພາລາມິເຕີແມ່ນຕົວຊີ້ໄປຫາ enum ກັບລາຍການຕໍ່ໄປນີ້:
- MAR_NOACTIVITY = 0
- MAR_STATIONARY = 1
- MAR_WALKING = 2
- MAR_FASTWALKING = 3
- MAR_JOGGING = 4
- MAR_BKING = 5
- MAR_DRIVING = 6
- ເວລາທີ່ສຸດamp ແມ່ນເວລາທີ່ກ່ຽວຂ້ອງສໍາລັບຕົວຈິງ sample ໃນ ms
- void MotionAR_ ຕັ້ງ Orientation_ Acc(const char *acc_ orientation)
- ກໍານົດທິດທາງຂໍ້ມູນ accelerometer
- ປົກກະຕິແລ້ວການກຳນົດຄ່າຈະຖືກປະຕິບັດໃນທັນທີຫຼັງຈາກ Motion AR_ Initialize function call
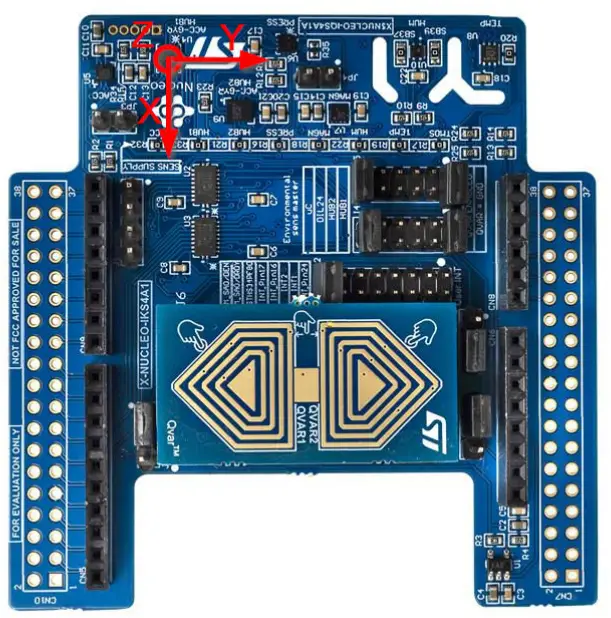
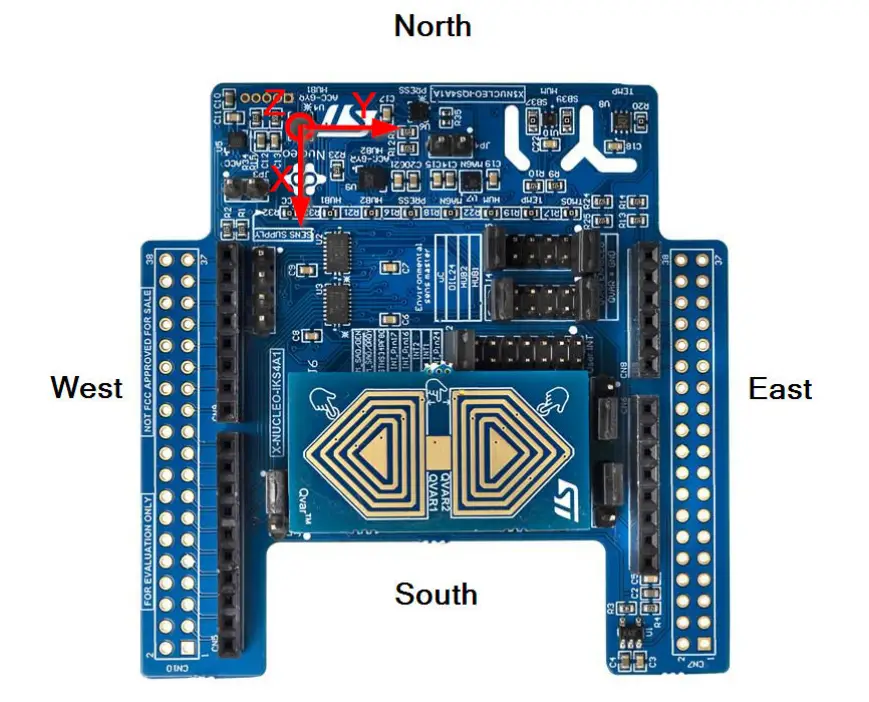
- *acc_ ພາລາມິເຕີການປະຖົມນິເທດແມ່ນຕົວຊີ້ໄປຫາສະຕຣິງຂອງສາມຕົວອັກສອນທີ່ຊີ້ບອກທິດທາງຂອງແຕ່ລະທິດທາງໃນທາງບວກຂອງກອບການອ້າງອິງທີ່ໃຊ້ສໍາລັບຜົນຜະລິດຂໍ້ມູນ accelerometer, ໃນລໍາດັບ x, y, z. ຄ່າທີ່ຖືກຕ້ອງແມ່ນ: n (ເໜືອ) ຫຼື s (ໃຕ້), w (ຕາເວັນຕົກ) ຫຼື e (ຕາເວັນອອກ), u (ຂຶ້ນ) ຫຼື d (ລົງ)
- ດັ່ງທີ່ສະແດງຢູ່ໃນຮູບຂ້າງລຸ່ມນີ້, ເຊັນເຊີ accelerometer X-NUCLEO-IKS4A1 ມີ SEU (x-South, y- East, z-Up), ດັ່ງນັ້ນສາຍແມ່ນ: "seu".
ຮູບທີ 1. ທິດທາງຂອງເຊັນເຊີ example
API flow char
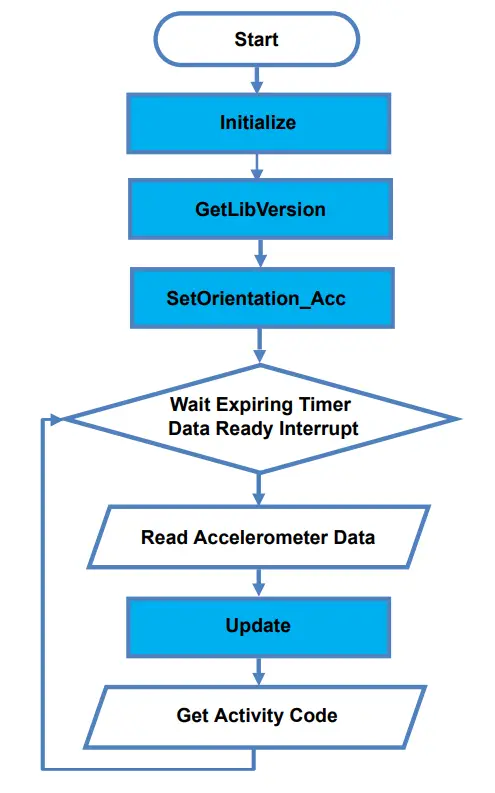
ຮູບທີ 2. ລໍາດັບເຫດຜົນຂອງ Motion AR API
ລະຫັດສາທິດ
ລະຫັດການສາທິດຕໍ່ໄປນີ້ຈະອ່ານຂໍ້ມູນຈາກເຊັນເຊີ accelerometer ແລະໄດ້ຮັບລະຫັດກິດຈະກໍາ
[…] #define VERSION_STR_LENG 35 […] /*** ການເລີ່ມຕົ້ນ ***/ char lib_version[VERSION_STR_LENG]; char acc_orientation[] = "seu" ; /* ຟັງຊັນການເລີ່ມຕົ້ນ API ການຮັບຮູ້ການເຄື່ອນໄຫວ */ MotionAR_Initialize(); /* ທາງເລືອກ: ເອົາເວີຊັນ */ MotionAR_GetLibVersion(lib_version); /* ຕັ້ງທິດທາງ accelerometer */ MotionAR_SetOrientation_Acc(acc_orientation); […] /*** ການນໍາໃຊ້ວິທີການຮັບຮູ້ກິດຈະກໍາ */ Timer_ OR_ ອັດຕາການຂໍ້ມູນ_ Interrupt_ Handler() {
MAR_input_t data_ ໃນ; MAR_ output_ t ກິດຈະກໍາ; /* ຮັບການເລັ່ງ X/Y/Z ໃນ g */ MEMS_Read_AccValue(&data_in.acc_x, &data_in.acc_y, &data_in.acc_z); /* ເອົາເວລາປັດຈຸບັນເປັນ ms */ TIMER_Get_TimeValue(×tamp_ນາງສາວ); /* ອັບເດດລະບົບການຮັບຮູ້ກິດຈະກຳ */ MotionAR_Update(data_in, data_out, timestamp_ນາງສາວ); }
ການປະຕິບັດສູດການຄິດໄລ່
ຂັ້ນຕອນການຮັບຮູ້ກິດຈະກຳພຽງແຕ່ໃຊ້ຂໍ້ມູນຈາກເຄື່ອງວັດແທກຄວາມເລັ່ງ ແລະແລ່ນຢູ່ທີ່ຄວາມຖີ່ຕໍ່າ (16 Hz) ເພື່ອຫຼຸດການໃຊ້ພະລັງງານ.
ຕາຕະລາງ 2. ການປະຕິບັດສູດການຄິດໄລ່
| ກິດຈະກໍາ | ຄວາມເປັນໄປໄດ້ຂອງການກວດຫາ (ປົກກະຕິ)(1) | ປະສິດທິພາບທີ່ດີທີ່ສຸດ | ມີຄວາມອ່ອນໄຫວ | ປະຕິບັດຕໍາແໜ່ງ |
| ສະຖານີ | 92.27% | ຖືຢູ່ໃນມືແລະການສົ່ງຂໍ້ຄວາມຢ່າງຮຸນແຮງ | ທັງໝົດ: ຖົງໂສ້ງ, ກະເປົ໋າເສື້ອ, ກະເປົ໋າຫຼັງ, ໃກ້ຫົວ, ແລະອື່ນໆ. | |
| ຍ່າງ | 99.44% | ອັດຕາຂັ້ນ ≥ 1.4 ກ້າວ/ວິນາທີ | ອັດຕາຂັ້ນ ≤ 1.2 ກ້າວ/ວິນາທີ | ທັງໝົດ |
| ຍ່າງໄວ | 95.94% | ອັດຕາຂັ້ນ ≥ 2.0 ກ້າວ/ວິນາທີ | ທັງໝົດ | |
| ແລ່ນແລ່ນ | 98.49% | ອັດຕາຂັ້ນ ≥ 2.2 ກ້າວ/ວິນາທີ | ໄລຍະເວລາ < 1 ນາທີ; ຄວາມໄວ < 8 Km/h | ກະເປົ໋າໂສ້ງຂາຍາວ, ແຂນ swing, ໃນມື |
| ຖີບລົດ | 91.93% | ຄວາມໄວກາງແຈ້ງ ≥11 Km/h | ບ່ອນນັ່ງຜູ້ໂດຍສານ, ຊ່ອງໃສ່ຖົງມື | ກະເປົ໋າເປ້, ກະເປົ໋າເສື້ອ, ຖົງໂສ້ງ |
| ຂັບລົດ | 78.65% | ຄວາມໄວ ≥ 48 Km/h | ບ່ອນນັ່ງຜູ້ໂດຍສານ, ຊ່ອງໃສ່ຖົງມື | ຕູ້ໃສ່ຈອກ, ກະດານ dash, ກະເປົ໋າເສື້ອ, ຖົງໂສ້ງ |
- ລັກສະນະສະເພາະແມ່ນບໍ່ມີການຮັບປະກັນ
ຕາຕະລາງ 3. Cortex-M4 ແລະ Cortex-M3: ເວລາຜ່ານໄປ (µs) algorithm
| Cortex-M4 STM32F401RE ທີ່ 84 MHz | Cortex-M3 STM32L152RE ທີ່ 32 MHz | ||||
| ຕ່ຳສຸດ | ສະເລ່ຍ | ສູງສຸດ | ຕ່ຳສຸດ | ສະເລ່ຍ | ສູງສຸດ |
| 2 | 6 | 153 | 8 | 130 | 4883 |
ຕາຕະລາງ 4. Cortex-M33 ແລະ Cortex-M7: algorithm ເວລາຜ່ານໄປ (μs)
| Cortex-M33 STM32U575ZI-Q ທີ່ 160 MHz | Cortex-M7 STM32F767ZI ທີ່ 96 MHz | ||||
| ຕ່ຳສຸດ | ສະເລ່ຍ | ສູງສຸດ | ຕ່ຳສຸດ | ສະເລ່ຍ | ສູງສຸດ |
| < 1 | 2 | 74 | 5 | 9 | 145 |
Sampຄໍາຮ້ອງສະຫມັກ le
MotionAR ກາງສາມາດຖືກດັດແປງໄດ້ຢ່າງງ່າຍດາຍເພື່ອສ້າງຄໍາຮ້ອງສະຫມັກຂອງຜູ້ໃຊ້; ເປັນampຄໍາຮ້ອງສະຫມັກ le ແມ່ນສະຫນອງໃຫ້ຢູ່ໃນໂຟນເດີຄໍາຮ້ອງສະຫມັກ.
ມັນຖືກອອກແບບມາເພື່ອແລ່ນຢູ່ໃນກະດານພັດທະນາ NUCLEO-F401RE, NUCLEO-L152RE ຫຼື NUCLEO-U575ZI-Q ທີ່ເຊື່ອມຕໍ່ກັບກະດານຂະຫຍາຍ X-NUCLEO-IKS01A3 ຫຼື X-NUCLEO-IKS4A1.
ແອັບພລິເຄຊັນຮັບຮູ້ກິດຈະກໍາທີ່ປະຕິບັດໃນເວລາຈິງ. ຂໍ້ມູນສາມາດສະແດງຜ່ານ GUI. ສູດການຄິດໄລ່ຮັບຮູ້ການຢູ່ແບບຢືນ, ເວລາຍ່າງ, ຍ່າງໄວ, ແລ່ນແລ່ນ, ຂີ່ລົດຖີບ ແລະການເຄື່ອນໄຫວຂັບລົດ. ຕ້ອງເຊື່ອມຕໍ່ສາຍ USB ເພື່ອຕິດຕາມຂໍ້ມູນແບບສົດໆ. ກະດານແມ່ນຂັບເຄື່ອນໂດຍ PC ຜ່ານການເຊື່ອມຕໍ່ USB. ນີ້ອະນຸຍາດໃຫ້ຜູ້ໃຊ້ສາມາດສະແດງກິດຈະກໍາທີ່ກວດພົບ, ຂໍ້ມູນ accelerometer, ເວລາ stamp ແລະໃນທີ່ສຸດຂໍ້ມູນເຊັນເຊີອື່ນໆ, ໃນເວລາຈິງ, ໂດຍໃຊ້ແອັບພລິເຄຊັນ MEMS-Studio GUI.
ຄໍາຮ້ອງສະຫມັກ MEMS-Studio
ທampຄໍາຮ້ອງສະຫມັກ le ໃຊ້ຄໍາຮ້ອງສະຫມັກ MEMS-Studio GUI, ເຊິ່ງສາມາດດາວໂຫຼດໄດ້ຈາກ www.st.com.
ຂັ້ນຕອນທີ 1. ໃຫ້ແນ່ໃຈວ່າການຕິດຕັ້ງໄດເວີທີ່ຈໍາເປັນແລະກະດານ STM32 Nucleo ທີ່ມີກະດານຂະຫຍາຍທີ່ເຫມາະສົມແມ່ນເຊື່ອມຕໍ່ກັບ PC.
ຂັ້ນຕອນທີ 2. ເປີດໃຊ້ແອັບພລິເຄຊັນ MEMS-Studio ເພື່ອເປີດໜ້າຈໍແອັບພລິເຄຊັນຫຼັກ.
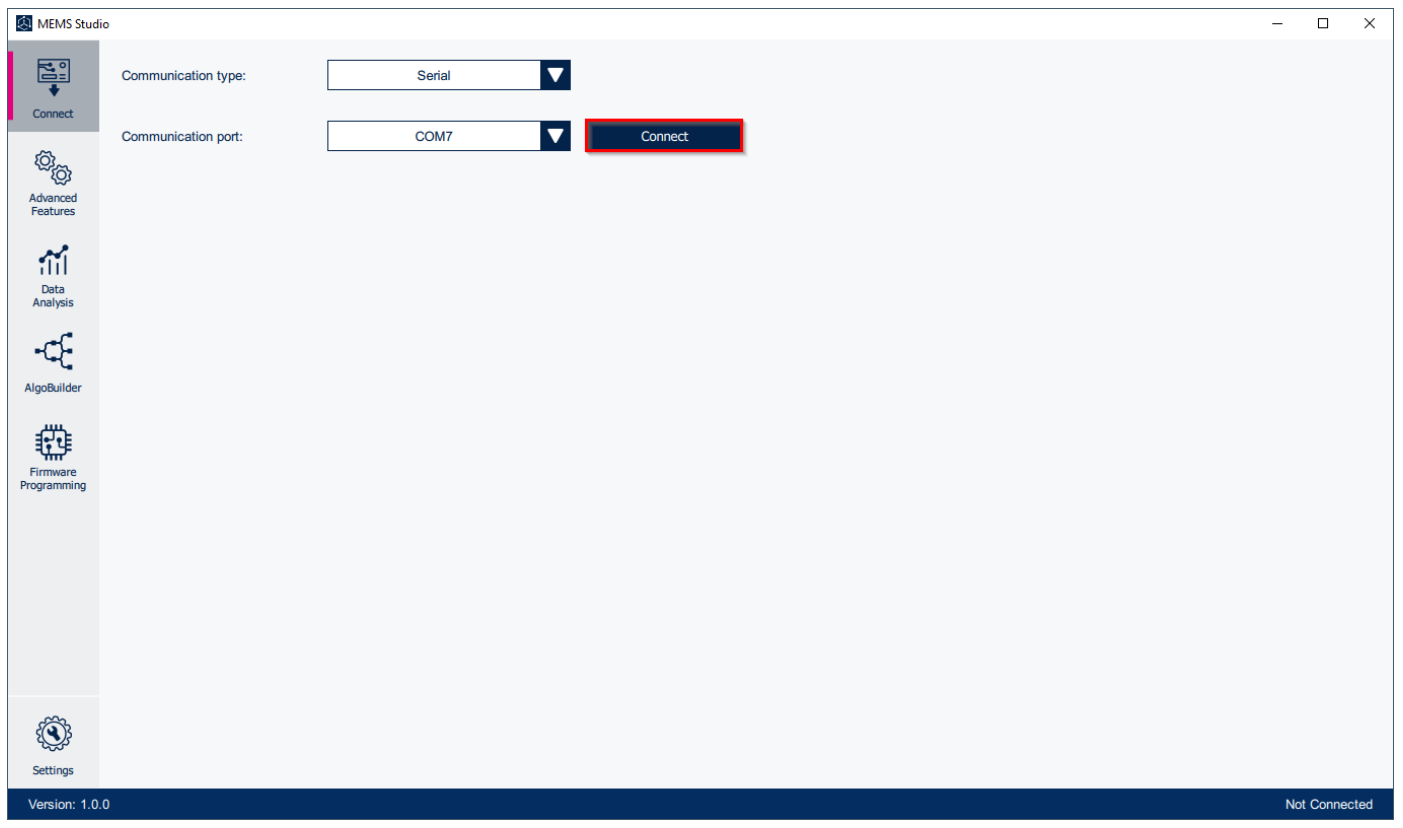
ຖ້າກະດານ STM32 Nucleo ທີ່ມີເຟີມແວທີ່ຮອງຮັບແມ່ນເຊື່ອມຕໍ່ກັບ PC, ມັນຈະຖືກກວດພົບອັດຕະໂນມັດພອດ COM ທີ່ເຫມາະສົມ. ກົດປຸ່ມເຊື່ອມຕໍ່ເພື່ອເປີດຜອດນີ້.
ຮູບທີ 3. MEMS-Studio – ເຊື່ອມຕໍ່
ຂັ້ນຕອນທີ 3. ເມື່ອເຊື່ອມຕໍ່ກັບກະດານ STM32 Nucleo ທີ່ມີເຟີມແວທີ່ຮອງຮັບ, ແຖບການປະເມີນຜົນຫ້ອງສະໝຸດເປີດ.
ເພື່ອເລີ່ມຕົ້ນ ແລະຢຸດການຖ່າຍທອດຂໍ້ມູນ ໃຫ້ສະຫຼັບຄວາມເໝາະສົມ ![]() ເລີ່ມຕົ້ນ /
ເລີ່ມຕົ້ນ / ![]() ປຸ່ມຢຸດຢູ່ໃນແຖບເຄື່ອງມືຕັ້ງທາງນອກ.
ປຸ່ມຢຸດຢູ່ໃນແຖບເຄື່ອງມືຕັ້ງທາງນອກ.
ຂໍ້ມູນທີ່ມາຈາກເຊັນເຊີທີ່ເຊື່ອມຕໍ່ສາມາດເປັນ viewed ເລືອກແຖບຕາຕະລາງຂໍ້ມູນໃນແຖບເຄື່ອງມືຕັ້ງພາຍໃນ.
ຮູບທີ 4. MEMS-Studio – ການປະເມີນຫ້ອງສະໝຸດ – ຕາຕະລາງຂໍ້ມູນ
ຮູບທີ 5. MEMS-Studio – ການປະເມີນຫ້ອງສະໝຸດ – ການຮັບຮູ້ການເຄື່ອນໄຫວ
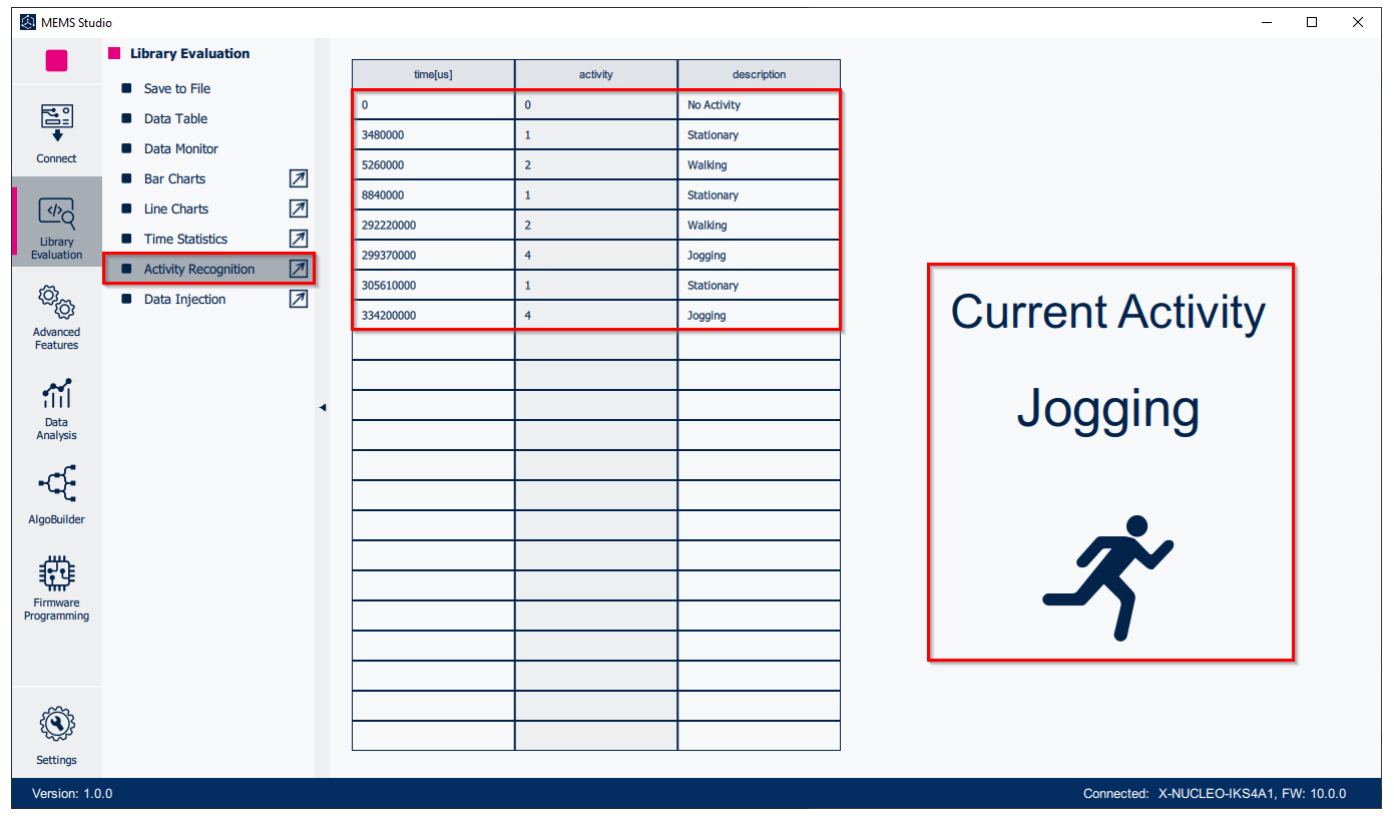
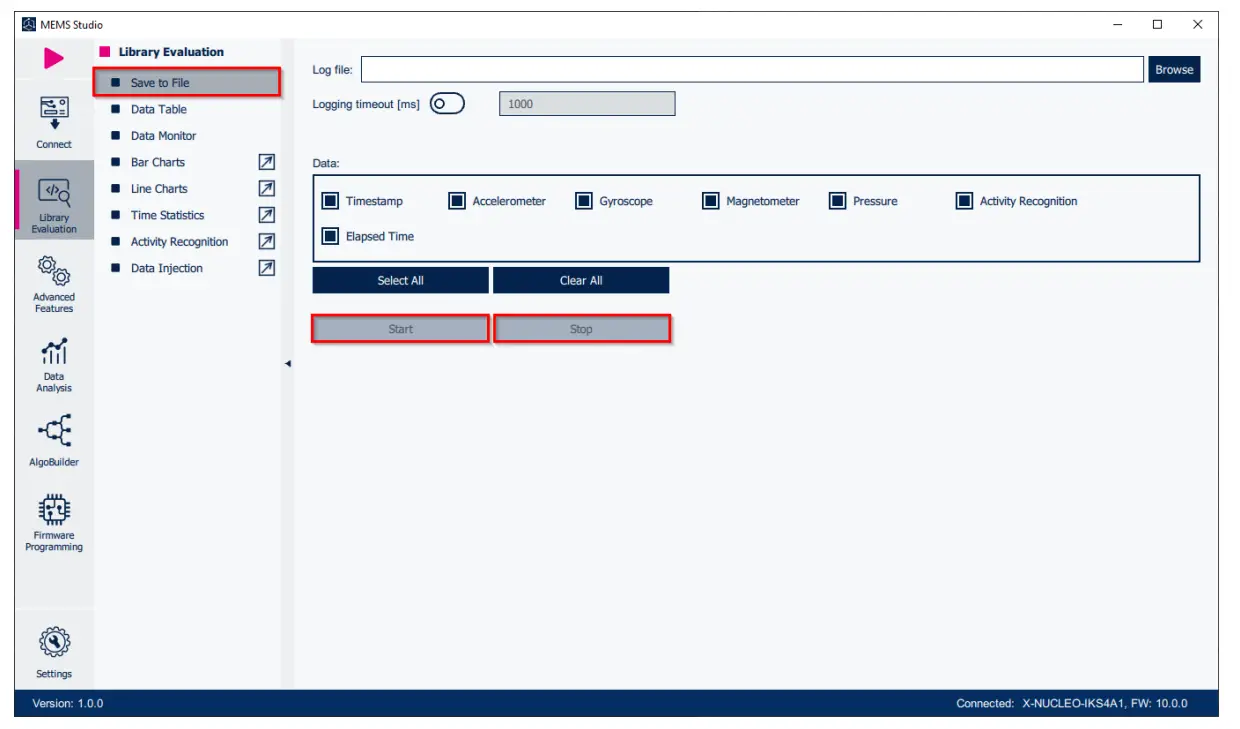
ຂັ້ນຕອນທີ 5. ເລືອກ Save to File ແຖບໃນແຖບເຄື່ອງມືແນວຕັ້ງພາຍໃນເພື່ອເປີດປ່ອງຢ້ຽມການຕັ້ງຄ່າການບັນທຶກຂໍ້ມູນ. ເລືອກວ່າເຊັນເຊີໃດ ແລະຂໍ້ມູນການເຄື່ອນໄຫວທີ່ຈະບັນທຶກເພື່ອບັນທຶກ file. ທ່ານສາມາດເລີ່ມຕົ້ນຫຼືຢຸດການບັນທຶກໂດຍການຄລິກໃສ່ປຸ່ມ Start / Stop ທີ່ສອດຄ້ອງກັນ.
ຮູບທີ 6. MEMS-Studio – ການປະເມີນຫ້ອງສະໝຸດ – ບັນທຶກໃສ່ File
ເອກະສານອ້າງອີງ
ທັງຫມົດຂອງຊັບພະຍາກອນດັ່ງຕໍ່ໄປນີ້ແມ່ນ freely ມີຢູ່ໃນ www.st.com.
- UM1859: ເລີ່ມຕົ້ນດ້ວຍ X-CUBE-MEMS1 motion MEMS ແລະການຂະຫຍາຍຊອບແວເຊັນເຊີສິ່ງແວດລ້ອມສໍາລັບ STM32Cube
- UM1724: ກະດານ STM32 Nucleo-64 (MB1136)
- UM3233: ການເລີ່ມຕົ້ນດ້ວຍ MEMS-Studio
ປະຫວັດການແກ້ໄຂ
ຕາຕະລາງ 5. ປະຫວັດການແກ້ໄຂເອກະສານ
| ວັນທີ | ຮຸ່ນ | ການປ່ຽນແປງ |
| 10-ເມສາ-2017 | 1 | ການປ່ອຍຕົວໃນເບື້ອງຕົ້ນ. |
| 26-ມັງກອນ-2018 | 2 | ອັບເດດພາກທີ 3 Sampຄໍາຮ້ອງສະຫມັກ le. ເພີ່ມການອ້າງອີງໃສ່ກະດານພັດທະນາ NUCLEO-L152RE ແລະຕາຕະລາງ 3. algorithm ເວລາຜ່ານໄປ (μs). |
| 19-ມີນາ-2018 | 3 | ອັບເດດບົດແນະນຳ, ພາກທີ 2.1 Motion AR overview ແລະພາກທີ 2.2.5 ການປະຕິບັດລະບົບຂອງລະບົບ. |
| 14-Feb-2019 | 4 | ອັບເດດຮູບ 1. ທິດທາງຂອງເຊັນເຊີ example, ຕາຕະລາງ 3. ເວລາຜ່ານໄປ (µs) algorithm ແລະຮູບທີ 3. STM32 Nucleo: LEDs, button, jumper. ເພີ່ມຂໍ້ມູນຄວາມເຂົ້າກັນໄດ້ຂອງກະດານຂະຫຍາຍ X-NUCLEO-IKS01A3. |
| 20-ມີນາ-2019 | 5 | ອັບເດດພາກທີ 2.2.2 Motion AR APIs, ຮູບ 3. MEMS-Studio – Connect, ຮູບ 4. MEMS-Studio – ການປະເມີນຫ້ອງສະໝຸດ – ຕາຕະລາງຂໍ້ມູນ, ຮູບ 5. MEMS-Studio – ການປະເມີນຫ້ອງສະໝຸດ – ການຮັບຮູ້ການເຄື່ອນໄຫວ ແລະຮູບ 6. MEMS-Studio - ການປະເມີນຫ້ອງສະຫມຸດ - ຊ່ວຍປະຢັດ File. |
| 04-ເມສາ-2024 | 6 | ອັບເດດ ພາກສະເໜີ, ພາກທີ 2.1: MotionAR overview, ພາກທີ 2.2.1: ຫ້ອງສະໝຸດ MotionAR ລາຍລະອຽດ, MotionAR APIs, ພາກທີ 2.2.4: ລະຫັດສາທິດ, ພາກທີ 2.2.5: ການປະຕິບັດລະບົບສູດການຄິດໄລ່, ພາກທີ 3: ສampຄໍາຮ້ອງສະຫມັກ le ແລະ ພາກທີ 4: ຄໍາຮ້ອງສະຫມັກ MEMS-Studio. |
ແຈ້ງການສໍາຄັນ - ອ່ານຢ່າງລະມັດລະວັງ
STMicroelectronics NV ແລະບໍລິສັດຍ່ອຍຂອງຕົນ (“ST”) ສະຫງວນສິດໃນການປ່ຽນແປງ, ການແກ້ໄຂ, ການປັບປຸງ, ການປັບປຸງ, ການແກ້ໄຂ ແລະການປັບປຸງຜະລິດຕະພັນ ST ແລະ/ຫຼື ເອກະສານນີ້ໄດ້ທຸກເວລາໂດຍບໍ່ຕ້ອງແຈ້ງລ່ວງໜ້າ. ຜູ້ຊື້ຄວນໄດ້ຮັບຂໍ້ມູນທີ່ກ່ຽວຂ້ອງຫລ້າສຸດກ່ຽວກັບຜະລິດຕະພັນ ST ກ່ອນທີ່ຈະວາງຄໍາສັ່ງ. ຜະລິດຕະພັນ ST ແມ່ນຂາຍຕາມຂໍ້ກໍານົດແລະເງື່ອນໄຂຂອງ ST ຂອງການຂາຍໃນສະຖານທີ່ໃນເວລາທີ່ຮັບຮູ້ຄໍາສັ່ງ.
ຜູ້ຊື້ແມ່ນຮັບຜິດຊອບພຽງແຕ່ສໍາລັບການເລືອກ, ການຄັດເລືອກ, ແລະການນໍາໃຊ້ຜະລິດຕະພັນ ST ແລະ ST ຖືວ່າບໍ່ມີຄວາມຮັບຜິດຊອບສໍາລັບການຊ່ວຍເຫຼືອຄໍາຮ້ອງສະຫມັກຫຼືການອອກແບບຜະລິດຕະພັນຂອງຜູ້ຊື້.
ບໍ່ມີໃບອະນຸຍາດ, ສະແດງອອກຫຼືໂດຍຄວາມຫມາຍ, ຕໍ່ກັບສິດທິຊັບສິນທາງປັນຍາໃດໆທີ່ຖືກອະນຸຍາດໂດຍ ST ຢູ່ທີ່ນີ້.
ການຂາຍຄືນຂອງຜະລິດຕະພັນ ST ທີ່ມີຂໍ້ກໍານົດທີ່ແຕກຕ່າງຈາກຂໍ້ມູນທີ່ກໍານົດໄວ້ໃນທີ່ນີ້ຈະປະຖິ້ມການຮັບປະກັນໃດໆທີ່ໃຫ້ໂດຍ ST ສໍາລັບຜະລິດຕະພັນດັ່ງກ່າວ.
ST ແລະໂລໂກ້ ST ແມ່ນເຄື່ອງຫມາຍການຄ້າຂອງ ST. ສໍາລັບຂໍ້ມູນເພີ່ມເຕີມກ່ຽວກັບເຄື່ອງຫມາຍການຄ້າ ST, ເບິ່ງ www.st.com/trademarks. ຊື່ຜະລິດຕະພັນ ຫຼືບໍລິການອື່ນໆທັງໝົດແມ່ນເປັນຊັບສິນຂອງເຈົ້າຂອງຂອງເຂົາເຈົ້າ.
ຂໍ້ມູນໃນເອກະສານນີ້ແທນທີ່ ແລະແທນທີ່ຂໍ້ມູນທີ່ສະໜອງໃຫ້ໃນເມື່ອກ່ອນໃນສະບັບກ່ອນໜ້າຂອງເອກະສານນີ້.
© 2024 STMicroelectronics – ສະຫງວນລິຂະສິດທັງໝົດ

ເອກະສານ / ຊັບພະຍາກອນ
 |
ຫ້ອງສະໝຸດການຮັບຮູ້ການເຄື່ອນໄຫວ STMicroelectronics UM2193 MotionAR [pdf] ຄູ່ມືຜູ້ໃຊ້ UM2193 MotionAR Activity Recognition Library, UM2193, MotionAR Activity Recognition Library, ຫໍສະໝຸດການຮັບຮູ້ການເຄື່ອນໄຫວ, ຫໍສະໝຸດການຮັບຮູ້, ຫ້ອງສະໝຸດ |


