Comba MIRCU-S24 ໜ່ວຍຄວບຄຸມໄລຍະໄກຫຼາຍພາຍໃນ

ຄໍານໍາ
ຄູ່ມືການໃຊ້ນີ້ອະທິບາຍການນໍາໃຊ້ພື້ນຖານຂອງສາຍອາກາດອຽງໄຟຟ້າທີ່ເຊື່ອມຕໍ່ກັບຫນ່ວຍບໍລິການທາງໄກຫຼາຍພາຍໃນ (MIRCU). ເນື່ອງຈາກອຸປະກອນແລະການຍົກລະດັບຊອບແວທີ່ແຕກຕ່າງກັນ, ບາງລາຍລະອຽດໃນຄູ່ມືນີ້ອາດຈະແຕກຕ່າງຈາກການນໍາໃຊ້ຕົວຈິງ. ຂໍ້ມູນທີ່ມີຢູ່ໃນເອກະສານນີ້ແມ່ນມີການປ່ຽນແປງໂດຍບໍ່ມີການແຈ້ງລ່ວງຫນ້າ.
ລະວັງຄວາມປອດໄພ
- ຕິດຕັ້ງປ້າຍຄວາມປອດໄພຢູ່ບ່ອນເພື່ອແຈ້ງໃຫ້ປະຊາຊົນຮູ້ວ່າພື້ນທີ່ອັນຕະລາຍຕໍ່ສາທາລະນະ; ພະນັກງານປະຕິບັດງານຕ້ອງໃຊ້ອຸປະກອນປ້ອງກັນໃນລະຫວ່າງການເຮັດວຽກ.
- ເອົາໃຈໃສ່ສໍາລັບການສູງ Voltage ສາຍປະມານໃນລະຫວ່າງການຕິດຕັ້ງ, ຈົ່ງລະມັດລະວັງແລະຫຼີກເວັ້ນການຊ໊ອກໄຟຟ້າ.
- ໃຫ້ແນ່ໃຈວ່າຕິດຕັ້ງເສົາອາກາດຢູ່ໃນມຸມປ້ອງກັນຂອງເສົາສາຍຟ້າ.
- ຕ້ອງຕິດຕັ້ງສາຍເຄເບີ້ນສາຍດິນ, ໃຫ້ແນ່ໃຈວ່າຄວາມຕ້ານທານຂອງສາຍດິນຫນ້ອຍກວ່າ 5Ω.
ເກີນview
ຈຸດປະສົງຫຼັກ ແລະ ຂອບເຂດການນຳໃຊ້
MIRCU ເປັນຕົວຄວບຄຸມການອຽງໄຟຟ້າທີ່ເປີດໃຊ້ເສົາອາກາດເພື່ອປະຕິບັດການອຽງໄຟຟ້າທາງໄກ. ມັນຕອບສະໜອງໄດ້ມາດຕະຖານ AISG2.0 & AISG3.0, ເໝາະສົມທີ່ຈະໃຊ້ກັບທຸກສະຖານີພື້ນຖານ Ericsson, Nokia, Huawei, ແລະ ZTE AISG2.0 & AISG3.0.
ລາຍລະອຽດຕົວແບບ
 ສະພາບການເຮັດວຽກປົກກະຕິ ແລະສະພາບແວດລ້ອມ
ສະພາບການເຮັດວຽກປົກກະຕິ ແລະສະພາບແວດລ້ອມ
- ອຸນຫະພູມອາກາດລ້ອມຮອບ: -40 ℃ to +60 ℃
- ການສະຫນອງພະລັງງານ: DC +10 V ຫາ +30 V
ຂະໜາດ ແລະນ້ຳໜັກ
ຮູບແຕ້ມໂຄງຮ່າງຂອງ MIRCU ແມ່ນສະແດງຢູ່ໃນຮູບ 1 ຂ້າງລຸ່ມນີ້:
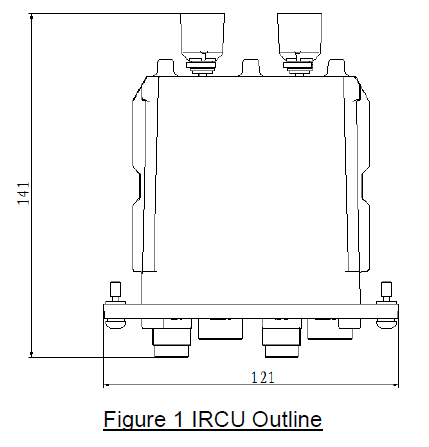 ຂະໜາດ ແລະນ້ຳໜັກແມ່ນສະແດງຢູ່ໃນຕາຕະລາງ 1 ຂ້າງລຸ່ມນີ້:
ຂະໜາດ ແລະນ້ຳໜັກແມ່ນສະແດງຢູ່ໃນຕາຕະລາງ 1 ຂ້າງລຸ່ມນີ້:
| ຕົວແບບ | ຂະໜາດ (L × W × H)/ມມ | ນ້ຳໜັກ/ກິໂລ (ໂດຍປະມານ) | ຂະໜາດບັນຈຸ (L × W × H)/ມມ |
| MIRCU-S24 | 141x125x41 | 0.5 | 160×178×87 |
ຕາຕະລາງ 1 IRCU ຂະຫນາດແລະນ້ໍາຫນັກ
ຂໍ້ມູນຈໍາເພາະຂອງ MIRCU
- ສໍາລັບຂໍ້ມູນຈໍາເພາະຂອງ MIRCU ກະລຸນາເບິ່ງ MIRCU Datasheet.
- MIRCU tilting ມຸມທີ່ມີຄວາມຖືກຕ້ອງຂອງການປັບຂອງ ± 0.1 °.
ລະບົບ RET ແລະຫຼັກການການເຮັດວຽກ
ລະບົບ RET
Multi Remote Electrical Tilt (RET) ລະບົບປະກອບດ້ວຍ 2 ພາກສ່ວນທີ່ສໍາຄັນ, ສາຍອາກາດກະທັດຮັດໄຟຟ້າແລະຕົວຄວບຄຸມ.
ຫຼັກການການເຮັດວຽກ
MIRCU ໄດ້ຮັບຂໍ້ມູນການຄວບຄຸມຫຼືຈໍານວນຂອງກໍາມະຈອນຫມຸນ motor ຕະຫຼອດການປັບ. ໂດຍການປັບການຫມຸນມໍເຕີຂອງ MIRCU, ມັນສາມາດໄດ້ຮັບການຄວບຄຸມການເຄື່ອນໄຫວຂອງຕົວປ່ຽນໄລຍະໃນເສົາອາກາດ, ແລະດັ່ງນັ້ນຈຶ່ງສາມາດຄວບຄຸມມຸມອຽງໄຟຟ້າຂອງເສົາອາກາດ. ໃນຂະນະທີ່ຮັກສາການສື່ສານທີ່ໃຊ້ເວລາທີ່ແທ້ຈິງລະຫວ່າງ
MIRCU ແລະ PCU (Portable Control Unit), PCU ສົ່ງຄໍາສັ່ງຄວບຄຸມໄປຫາ MIRCU; MIRCU ຈະສົ່ງຄືນຜົນການຄວບຄຸມໄປຍັງ PCU, ແລະ PCU ເຮັດໜ້າທີ່ເປັນການໂຕ້ຕອບຂອງມະນຸດ-ເຄື່ອງຈັກ.
2 ຫຼັກການພື້ນຖານການເຮັດວຽກ
ໂມດູນ MIRCU-S24 ມີ 2 ຄູ່ຂອງພອດ AISG ແລະຮອງຮັບ AISG3.0 protocol, ແລະສາມາດຄວບຄຸມໄດ້ໂດຍ 2 ຕົ້ນຕໍ (ສະຖານີຖານ) ທີ່ຕອບສະຫນອງ AISG2.0 ຫຼື AISG3.0 protocol ໃນເວລາດຽວກັນ. ພອດ AISG ຂອງໂມດູນແບ່ງປັນຂໍ້ມູນການຕັ້ງຄ່າດຽວກັນແລະມີເລກລໍາດັບດຽວກັນ.
ມີ 2 ມໍເຕີພາຍໃນ MIRCU-S24, ເຊິ່ງສາມາດຂັບສາຍອາກາດ 8 ຄວາມຖີ່ໃນປະຈຸບັນ. ໃນອະນາຄົດອັນໃກ້ນີ້, ດ້ວຍຄວາມຊັບຊ້ອນຄວາມຕ້ອງການເສົາອາກາດເພີ່ມຂຶ້ນ, ເຟີມແວຈະຖືກປັບປຸງເພື່ອຮອງຮັບເສົາອາກາດເຖິງ 20 ຄວາມຖີ່, ຄາດວ່າຈະເຮັດໃນ Q2 2021.
2 ຄູ່ຂອງພອດ AISG ບໍ່ມີຄວາມແຕກຕ່າງກັນກ່ຽວກັບຫນ້າທີ່ແຕ່ສິດອໍານາດ. ແຖບໃດສາມາດຖືກມອບຫມາຍໂດຍພອດ AISG ບໍ່ວ່າຈະເປັນ AISG 1 ຫຼື 2, ຍ້ອນວ່າແຖບດັ່ງກ່າວຍັງບໍ່ໄດ້ຖືກຕັ້ງຄ່າໂດຍພອດ AISG ອື່ນ.
ໝາຍເລກປະຈຳເຄື່ອງຂອງອຸປະກອນທີ່ສາມາດອ່ານໄດ້ໂດຍສະຖານີຖານ ASIG2.0 ໂດຍການສະແກນໂມດູນ MIRCU-S24 ມີດັ່ງນີ້: (ການອະນຸຍາດເຂົ້າເຖິງໃນຕອນຕົ້ນ)
 ເມື່ອການອະນຸຍາດການເຂົ້າເຖິງອຸປະກອນສໍາລັບຜອດສະແດງໃຫ້ເຫັນເປັນ "ບໍ່ມີການເຂົ້າເຖິງ", ສະຖານີຖານ AISG2.0 ຈະບໍ່ສາມາດສະແກນອຸປະກອນໄດ້. ການອະນຸຍາດການເຂົ້າເຖິງຂອງພອດແມ່ນຖືກກໍານົດໂດຍຄໍາສັ່ງການຕັ້ງຄ່າ MALD ຕາມທີ່ໄດ້ກໍານົດໄວ້ໃນໂປໂຕຄອນ AISG3.0.
ເມື່ອການອະນຸຍາດການເຂົ້າເຖິງອຸປະກອນສໍາລັບຜອດສະແດງໃຫ້ເຫັນເປັນ "ບໍ່ມີການເຂົ້າເຖິງ", ສະຖານີຖານ AISG2.0 ຈະບໍ່ສາມາດສະແກນອຸປະກອນໄດ້. ການອະນຸຍາດການເຂົ້າເຖິງຂອງພອດແມ່ນຖືກກໍານົດໂດຍຄໍາສັ່ງການຕັ້ງຄ່າ MALD ຕາມທີ່ໄດ້ກໍານົດໄວ້ໃນໂປໂຕຄອນ AISG3.0.
ຕົວຢ່າງampໃນນອກຈາກນັ້ນ, ໂມດູນມີ 8 ອຸປະກອນແລະການອະນຸຍາດການເຂົ້າເຖິງອຸປະກອນໄດ້ຖືກຕັ້ງໄວ້ຂ້າງລຸ່ມນີ້:
| RET | PROT1 | PORT2 |
| CB01CB20C1234567-Y1 | ອ່ານ ແລະຂຽນ | ບໍ່ມີການເຂົ້າເຖິງ |
| CB02CB20C1234567-Y2 | ອ່ານ ແລະຂຽນ | ບໍ່ມີການເຂົ້າເຖິງ |
| CB03CB20C1234567-Y3 | ອ່ານ ແລະຂຽນ | ບໍ່ມີການເຂົ້າເຖິງ |
| CB04CB20C1234567-Y4 | ອ່ານ ແລະຂຽນ | ບໍ່ມີການເຂົ້າເຖິງ |
| CB05CB20C1234567-R1 | ບໍ່ມີການເຂົ້າເຖິງ | ອ່ານ ແລະຂຽນ |
| CB06CB20C1234567-R2 | ບໍ່ມີການເຂົ້າເຖິງ | ອ່ານ ແລະຂຽນ |
| CB07CB20C1234567-R3 | ບໍ່ມີການເຂົ້າເຖິງ | ອ່ານ ແລະຂຽນ |
| CB08CB20C1234567-R4 | ບໍ່ມີການເຂົ້າເຖິງ | ອ່ານ ແລະຂຽນ |
ເມື່ອສະຖານີຖານ AISG2.0 ຖືກເຊື່ອມຕໍ່, ພອດ 1 ສາມາດສະແກນຫາອຸປະກອນ CB01CB20C1234567-Y1, CB02CB20C1234567-Y2, CB03CB20C1234567-Y3, CB04CB20C1234567-Y4. ພອດ 4 ສາມາດສະແກນຫາ CB2CB05C20-R1234567, CB1CB06C20-R1234567, CB2CB07C20-R1234567, CB3CB08C20-R1234567, 4 ອຸປະກອນ.
ເລກລໍາດັບອຸປະກອນທີ່ສາມາດອ່ານໄດ້ໂດຍສະຖານີຖານ AISG3.0 ໂດຍການສະແກນໂມດູນ MIRCU-S24 ມີດັ່ງລຸ່ມນີ້:
 ການເຮັດວຽກໃນໂຫມດ AISG2.0
ການເຮັດວຽກໃນໂຫມດ AISG2.0
ສະຫຼຸບຫຍໍ້ຂອງການປະຕິບັດຂໍ້ຂັດແຍ່ງສໍາລັບ 2 ປະຖົມ (1 ແລະ 2nd Primary) ປະຕິບັດການ MIRCU-S24 ແມ່ນສະແດງຢູ່ໃນຕາຕະລາງຂ້າງລຸ່ມນີ້:
**ໝາຍເຫດ: "√" ແລະ "X" ທັງຫມົດທີ່ສະແດງແມ່ນສ່ວນໃຫຍ່ແມ່ນກ່ຽວຂ້ອງກັບການປະຖົມ 2, ເຊິ່ງຫມາຍຄວາມວ່າການດໍາເນີນການທີ່ສອດຄ້ອງກັນຫຼືບໍ່ (ສະແດງຕາມແນວນອນໃນຕາຕະລາງ) ສາມາດປະຕິບັດໄດ້ໃນປະຖົມທີ 2 ເມື່ອປະຖົມ 1 ກໍາລັງປະຕິບັດຄໍາສັ່ງຫຼືການປະຕິບັດທີ່ແນ່ນອນ. (ລະບຸໃນແນວຕັ້ງໃນຕາຕະລາງ). ຄໍາສັ່ງຂອງບູລິມະສິດຂອງ "ປະຖົມ" ບໍ່ແມ່ນການແກ້ໄຂແລະມັນຂຶ້ນກັບວ່າຕົ້ນຕໍຈະເລີ່ມຕົ້ນການປະຕິບັດຄັ້ງທໍາອິດ.
|
2nd ປະຖົມ
1st ປະຖົມ |
ສະແກນ |
Calibrat ion |
ຕັ້ງ Tilt |
L2 ຮ້ານອາຫານ ເລື່ອງ |
L7 ຮ້ານອາຫານ ເລື່ອງ |
ອັບເດດ ກຳນົດຄ່າ file |
ອັບເດດ Firmwar e |
ຂໍ້ມູນຂ່າວສານ |
ຕັ້ງຄ່າຂໍ້ມູນອຸປະກອນ |
ຕົນເອງ-test |
|
ສະແກນ |
√ |
√ |
√ |
√ |
√ |
√ |
√ |
√ |
√ |
√ |
|
ການປັບທຽບ |
√ |
X |
X |
√ |
√ |
X |
X |
√ |
√ |
√ |
|
ຕັ້ງ Tilt |
√ |
X |
X |
√ |
√ |
X |
X |
√ |
√ |
√ |
|
L2 ການຟື້ນຟູ |
√ |
√ |
√ |
√ |
√ |
√ |
√ |
√ |
√ |
√ |
|
L7 ການຟື້ນຟູ |
√ |
√ |
√ |
√ |
√ |
√ |
√ |
√ |
√ |
√ |
| ອັບເດດການຕັ້ງຄ່າ file |
X |
X |
X |
X |
X |
X |
X |
X |
X |
X |
| ອັບເດດເຟີມແວ |
X |
X |
X |
X |
X |
X |
X |
X |
X |
X |
|
ຂໍ້ມູນ |
√ |
√ |
√ |
√ |
√ |
√ |
√ |
√ |
√ |
√ |
| ຕັ້ງຄ່າຂໍ້ມູນອຸປະກອນ |
√ |
√ |
√ |
√ |
√ |
√ |
√ |
√ |
√ |
√ |
|
ການທົດສອບຕົນເອງ |
√ |
√ |
√ |
√ |
√ |
√ |
√ |
√ |
√ |
√ |
X: ໝາຍເຫດ 1) MIRCU ບໍ່ສາມາດປະຕິບັດຄໍາສັ່ງຈາກ 2 ຕົ້ນຕໍທີ່ກ່ຽວຂ້ອງພ້ອມກັນ.
ມັນຂັດກັນແລະບໍ່ປະຕິບັດຕາມມາດຕະຖານ AISG.
ໝາຍ ເຫດ 2) 1 ຫຼັກສາມາດປະຕິບັດຄໍາສັ່ງຢ່າງສໍາເລັດຜົນ, ແຕ່ຄໍາສັ່ງທີ່ສົ່ງໂດຍຕົ້ນຕໍອື່ນບໍ່ສໍາເລັດ.
√: ຫມາຍເຫດ 1) MIRCU-S24 ສາມາດປະຕິບັດການຄໍາສັ່ງຈາກ 2 ຂັ້ນຕົ້ນທີ່ກ່ຽວຂ້ອງພ້ອມກັນ, ແລະປະຕິບັດຕາມມາດຕະຖານ AISG.
ໝາຍ ເຫດ 2) ເຖິງແມ່ນວ່າ 'Update Config File' ແລະ 'ອັບເດດເຟີມແວ' ສາມາດແລ່ນໃນປະຖົມທີ 2 ໃນຂະນະທີ່ປະຖົມທີ 1 ກໍາລັງດໍາເນີນການ, ລິ້ງຄ໌ໃນຂັ້ນຕົ້ນທີ 1 ຈະແຕກ ຈາກນັ້ນການກະທຳທັງໝົດຈະຢຸດ ແລະເຮັດວຽກບໍ່ໄດ້.
a) ສະແກນ
MIRCU-S24 ຮອງຮັບ 2 ແກນຫຼັກເພື່ອສະແກນ MIRCU ພ້ອມກັນ. ເມື່ອການສະແກນຂັ້ນຕົ້ນທີ 1, ປະຖົມທີ 2 ແມ່ນສາມາດສະແກນ, calibrate, ຕັ້ງ tilt, ຟື້ນຟູ L2/L7, ປັບປຸງການຕັ້ງຄ່າ file, ອັບເດດເຟີມແວ, ຮັບຂໍ້ມູນ MIRCU, ຕັ້ງຄ່າຂໍ້ມູນອຸປະກອນ ແລະການທົດສອບດ້ວຍຕົນເອງ.
ໃນເວລາທີ່ປະຖົມ 1 ແມ່ນການສະແກນ, ຖ້າຄໍາສັ່ງຕົ້ນຕໍທີ່ 2 ສົ່ງໄປຫາ MIRCU, ຜົນກະທົບຕໍ່ການປະຖົມ 1 ແມ່ນສະແດງຢູ່ໃນຕາຕະລາງຂ້າງລຸ່ມນີ້:
| 2nd ການປະຕິບັດຂັ້ນຕົ້ນ | ຖ້າ MIRCU ສະຫນັບສະຫນູນ | ຜົນກະທົບ 1st ປະຖົມ |
| ສະແກນ | ສະຫນັບສະຫນູນ | ບໍ່ມີຜົນກະທົບ |
| ການປັບທຽບ | ສະຫນັບສະຫນູນ | ບໍ່ມີຜົນກະທົບ |
| ຕັ້ງ Tilt | ສະຫນັບສະຫນູນ | ບໍ່ມີຜົນກະທົບ |
| L2 / L7 ການຟື້ນຟູ | ສະຫນັບສະຫນູນ | ບໍ່ມີຜົນກະທົບ |
| ອັບເດດການຕັ້ງຄ່າ File | ສະຫນັບສະຫນູນ | ການເຊື່ອມຕໍ່ຫັກ |
| ອັບເດດເຟີມແວ | ສະຫນັບສະຫນູນ | ການເຊື່ອມຕໍ່ຫັກ |
| ໄດ້ຮັບຂໍ້ມູນ | ສະຫນັບສະຫນູນ | ບໍ່ມີຜົນກະທົບ |
| ຕັ້ງຄ່າຂໍ້ມູນອຸປະກອນ | ສະຫນັບສະຫນູນ | ບໍ່ມີຜົນກະທົບ |
| ການທົດສອບຕົນເອງ | ສະຫນັບສະຫນູນ | ບໍ່ມີຜົນກະທົບ |
b) Calibration
MIRCU-S24 ບໍ່ຮອງຮັບ 2 ແກນຫຼັກເພື່ອເຮັດການປັບທຽບພ້ອມໆກັນ. ເມື່ອປະຖົມທີ 1 ຖືກປັບ, ປະຖົມທີ 2 ສາມາດສະແກນ MIRCU, ຟື້ນຟູ L2/L7, ເອົາຂໍ້ມູນ MIRCU, ຕັ້ງຄ່າຂໍ້ມູນອຸປະກອນ ແລະ ການທົດສອບດ້ວຍຕົວມັນເອງ ແຕ່ບໍ່ສາມາດປັບປັບ, ຕັ້ງການອຽງ, ອັບເດດການຕັ້ງຄ່າໄດ້. file ແລະອັບເດດເຟີມແວ.
ໃນເວລາທີ່ປະຖົມ 1 ແມ່ນການປັບຕົວ, ຖ້າຄໍາສັ່ງຕົ້ນຕໍທີ່ 2 ສົ່ງໄປຫາ MIRCU, ຜົນກະທົບຕໍ່ການປະຖົມ 1 ແມ່ນສະແດງຢູ່ໃນຕາຕະລາງຂ້າງລຸ່ມນີ້:
| 2nd ການປະຕິບັດຂັ້ນຕົ້ນ | ຖ້າ MIRCU ສະຫນັບສະຫນູນ | ຜົນກະທົບ 1st ປະຖົມ |
| ສະແກນ | ສະຫນັບສະຫນູນ | ບໍ່ມີຜົນກະທົບ |
| ການປັບທຽບ | ຕອບວ່າ "ບໍ່ຫວ່າງ" | ບໍ່ມີຜົນກະທົບ |
| ຕັ້ງ Tilt | ຕອບວ່າ "ບໍ່ຫວ່າງ" | ບໍ່ມີຜົນກະທົບ |
| L2 / L7 ການຟື້ນຟູ | ສະຫນັບສະຫນູນ | ບໍ່ມີຜົນກະທົບ |
| ອັບເດດການຕັ້ງຄ່າ File | ຕອບວ່າ "ບໍ່ຫວ່າງ" | ບໍ່ມີຜົນກະທົບ |
| ອັບເດດເຟີມແວ | ຕອບວ່າ "ບໍ່ຫວ່າງ" | ບໍ່ມີຜົນກະທົບ |
| ໄດ້ຮັບຂໍ້ມູນ | ສະຫນັບສະຫນູນ | ບໍ່ມີຜົນກະທົບ |
| ຕັ້ງຄ່າຂໍ້ມູນອຸປະກອນ | ສະຫນັບສະຫນູນ | ບໍ່ມີຜົນກະທົບ |
| ການທົດສອບຕົນເອງ | ສະຫນັບສະຫນູນ | ບໍ່ມີຜົນກະທົບ |
c) ຕັ້ງ Tilt
MIRCU-S24 ບໍ່ຮອງຮັບ 2 ແກນຫຼັກເພື່ອຕັ້ງການອຽງພ້ອມກັນ. ເມື່ອປະຖົມທີ 1 ກໍາລັງຕັ້ງການອຽງ, ປະຖົມທີ 2 ສາມາດສະແກນ MIRCU, ຟື້ນຟູ L2/L7, ເອົາຂໍ້ມູນ MIRCU, ຕັ້ງຄ່າຂໍ້ມູນອຸປະກອນ ແລະ ການທົດສອບດ້ວຍຕົວມັນເອງ ແຕ່ບໍ່ສາມາດປັບປັບ, ຕັ້ງການອຽງ, ອັບເດດການຕັ້ງຄ່າໄດ້. file ແລະອັບເດດເຟີມແວ.
ເມື່ອປະຖົມທີ 1 ກໍາລັງຕັ້ງການອຽງ, ຖ້າຄໍາສັ່ງຕົ້ນຕໍທີ່ 2 ສົ່ງໄປຫາ MIRCU, ຜົນກະທົບຕໍ່ການປະຖົມ 1 ແມ່ນສະແດງຢູ່ໃນຕາຕະລາງຂ້າງລຸ່ມນີ້:
| 2nd ການປະຕິບັດຂັ້ນຕົ້ນ | ຖ້າ MIRCU ສະຫນັບສະຫນູນ | ຜົນກະທົບ 1st ປະຖົມ |
| ສະແກນ | ສະຫນັບສະຫນູນ | ບໍ່ມີຜົນກະທົບ |
| ການປັບທຽບ | ຕອບວ່າ "ບໍ່ຫວ່າງ" | ບໍ່ມີຜົນກະທົບ |
| ຕັ້ງ Tilt | ຕອບວ່າ "ບໍ່ຫວ່າງ" | ບໍ່ມີຜົນກະທົບ |
| L2 / L7 ການຟື້ນຟູ | ສະຫນັບສະຫນູນ | ບໍ່ມີຜົນກະທົບ |
| ອັບເດດການຕັ້ງຄ່າ File | ຕອບວ່າ "ບໍ່ຫວ່າງ" | ບໍ່ມີຜົນກະທົບ |
| ອັບເດດເຟີມແວ | ຕອບວ່າ "ບໍ່ຫວ່າງ" | ບໍ່ມີຜົນກະທົບ |
| ໄດ້ຮັບຂໍ້ມູນ | ສະຫນັບສະຫນູນ | ບໍ່ມີຜົນກະທົບ |
| ຕັ້ງຄ່າຂໍ້ມູນອຸປະກອນ | ສະຫນັບສະຫນູນ | ບໍ່ມີຜົນກະທົບ |
| ການທົດສອບຕົນເອງ | ສະຫນັບສະຫນູນ | ບໍ່ມີຜົນກະທົບ |
d) L2 / L7 ການຟື້ນຟູ
MIRCU-S24 ຮອງຮັບ 2 ຫຼັກເພື່ອຟື້ນຟູ L2 ຫຼື L7 ພ້ອມກັນ. ມັນຈະບໍ່ເຮັດໃຫ້ເກີດການຣີເຊັດຮາດແວຂອງໂມດູນທັງໝົດ. ເມື່ອປະຖົມພະຍາບານທີ 1 ກຳລັງຟື້ນຟູ L2/L7, ປະຖົມທີ 2 ສາມາດສະແກນ, ປັບຕັ້ງ, ຕັ້ງການອຽງ, ຟື້ນຟູ L2/L7, ອັບເດດການຕັ້ງຄ່າ file, ອັບເດດເຟີມແວ, ຮັບຂໍ້ມູນ MIRCU, ຕັ້ງຄ່າຂໍ້ມູນອຸປະກອນ ແລະການທົດສອບດ້ວຍຕົນເອງ.
e) ການຕັ້ງຄ່າການອັບໂຫລດ File
MIRCU-S24 ບໍ່ຮອງຮັບ 2 ຫຼັກເພື່ອອັບເດດການຕັ້ງຄ່າ file ພ້ອມໆກັນ. ເມື່ອປະຖົມທີ 1 ກຳລັງອັບເດດການຕັ້ງຄ່າ file, ປະຖົມທີ 2 ບໍ່ສາມາດປະຕິບັດການໃດໆ. ມັນຈະຣີເຊັດ ແລະການເຊື່ອມຕໍ່ຈະຖືກຕັດການເຊື່ອມຕໍ່.
f) ອັບເດດເຟີມແວ
MIRCU-S24 ບໍ່ຮອງຮັບ 2 ຫຼັກເພື່ອອັບເດດເຟີມແວພ້ອມກັນ. ເມື່ອປະຖົມພະຍາບານທີ 1 ກຳລັງອັບເດດເຟີມແວ, ຫຼັກທີ 2 ບໍ່ສາມາດດຳເນີນການໃດໆໄດ້. ມັນຈະຣີເຊັດ ແລະການເຊື່ອມຕໍ່ຈະຖືກຕັດການເຊື່ອມຕໍ່.
g) ໄດ້ຮັບຂໍ້ມູນ MIRCU
MIRCU-S24 ສະຫນັບສະຫນູນ 2 ຕົ້ນຕໍເພື່ອໃຫ້ໄດ້ຮັບຂໍ້ມູນຂ່າວສານ RET ພ້ອມກັນ. ເມື່ອປະຖົມພະຍາບານທີ 1 ໄດ້ຮັບຂໍ້ມູນ MIRCU, ປະຖົມທີ 2 ສາມາດສະແກນ, ປັບຕັ້ງ, ຕັ້ງອຽງ, ຟື້ນຟູ L2/L7, ອັບເດດການຕັ້ງຄ່າ. file, ອັບເດດເຟີມແວ, ຮັບຂໍ້ມູນ MIRCU, ຕັ້ງຄ່າຂໍ້ມູນອຸປະກອນ ແລະການທົດສອບດ້ວຍຕົນເອງ.
ເມື່ອປະຖົມທີ 1 ກໍາລັງຕັ້ງການອຽງ, ຖ້າຄໍາສັ່ງຕົ້ນຕໍທີ່ 2 ສົ່ງໄປຫາ MIRCU, ຜົນກະທົບຕໍ່ການປະຖົມ 1 ແມ່ນສະແດງຢູ່ໃນຕາຕະລາງຂ້າງລຸ່ມນີ້:
| 2nd ການປະຕິບັດຂັ້ນຕົ້ນ | ຖ້າ MIRCU ສະຫນັບສະຫນູນ | ຜົນກະທົບ 1st ປະຖົມ |
| ສະແກນ | ສະຫນັບສະຫນູນ | ບໍ່ມີຜົນກະທົບ |
| ການປັບທຽບ | ສະຫນັບສະຫນູນ | ບໍ່ມີຜົນກະທົບ |
| ຕັ້ງ Tilt | ສະຫນັບສະຫນູນ | ບໍ່ມີຜົນກະທົບ |
| L2 / L7 ການຟື້ນຟູ | ສະຫນັບສະຫນູນ | ບໍ່ມີຜົນກະທົບ |
| ອັບເດດການຕັ້ງຄ່າ File | ສະຫນັບສະຫນູນ | ການເຊື່ອມຕໍ່ຫັກ |
| ອັບເດດເຟີມແວ | ສະຫນັບສະຫນູນ | ການເຊື່ອມຕໍ່ຫັກ |
| ໄດ້ຮັບຂໍ້ມູນ | ສະຫນັບສະຫນູນ | ບໍ່ມີຜົນກະທົບ |
| ຕັ້ງຄ່າຂໍ້ມູນອຸປະກອນ | ສະຫນັບສະຫນູນ | ບໍ່ມີຜົນກະທົບ |
| ການທົດສອບຕົນເອງ | ສະຫນັບສະຫນູນ | ບໍ່ມີຜົນກະທົບ |
h) ຕັ້ງຂໍ້ມູນອຸປະກອນ
MIRCU-S24 ຮອງຮັບ 2 ຫຼັກເພື່ອຕັ້ງຂໍ້ມູນອຸປະກອນພ້ອມໆກັນ. ເມື່ອປະຖົມນິເທດທີ 1 ກຳລັງຕັ້ງຄ່າຂໍ້ມູນອຸປະກອນ, ຫຼັກທີ 2 ແມ່ນສາມາດສະແກນ, ປັບຕັ້ງ, ຕັ້ງການອຽງ, ຟື້ນຟູ L2/L7, ອັບເດດການຕັ້ງຄ່າ file, ອັບເດດເຟີມແວ, ຮັບຂໍ້ມູນ MIRCU, ຕັ້ງຄ່າຂໍ້ມູນອຸປະກອນ ແລະການທົດສອບດ້ວຍຕົນເອງ.
**ໝາຍເຫດ: ຂໍ້ມູນທີ່ສາມາດປ່ຽນແປງໄດ້ປະກອບມີວັນທີການຕິດຕັ້ງ, ID ຂອງຜູ້ຕິດຕັ້ງ, ID ສະຖານີຖານ, ID ຂະແຫນງການ, ການຮັບຮອງເສົາອາກາດ (ອົງສາ), ການຕິດຕັ້ງ tilt ກົນຈັກ (ອົງສາ) ແລະຈໍານວນ serial ເສົາອາກາດ. ໝາຍເລກຕົວແບບຂອງເສົາອາກາດ, ແຖບປະຕິບັດການຂອງເສົາອາກາດ, Beamwidth, Gain (dB), ການອຽງສູງສຸດ (ອົງສາ) ແລະຄວາມອຽງຕໍ່າສຸດ (ອົງສາ) ບໍ່ສາມາດປ່ຽນແປງໄດ້, MIRCU-S24 ຈະຕອບວ່າ “ພ້ອມເທົ່ານັ້ນ”.
ເມື່ອປະຖົມນິເທດທີ 1 ກໍາລັງຕັ້ງຂໍ້ມູນອຸປະກອນ, ຖ້າຄໍາສັ່ງຕົ້ນຕໍທີ່ 2 ສົ່ງໄປໃຫ້ MIRCU, ຜົນກະທົບຂອງປະຖົມທີ 1 ແມ່ນສະແດງຢູ່ໃນຕາຕະລາງຂ້າງລຸ່ມນີ້:
| 2nd ການປະຕິບັດຂັ້ນຕົ້ນ | ຖ້າ MIRCU ສະຫນັບສະຫນູນ | ຜົນກະທົບ 1st ປະຖົມ |
| ສະແກນ | ສະຫນັບສະຫນູນ | ບໍ່ມີຜົນກະທົບ |
| ການປັບທຽບ | ສະຫນັບສະຫນູນ | ບໍ່ມີຜົນກະທົບ |
| ຕັ້ງ Tilt | ສະຫນັບສະຫນູນ | ບໍ່ມີຜົນກະທົບ |
| L2 / L7 ການຟື້ນຟູ | ສະຫນັບສະຫນູນ | ບໍ່ມີຜົນກະທົບ |
| ອັບເດດການຕັ້ງຄ່າ File | ສະຫນັບສະຫນູນ | ການເຊື່ອມຕໍ່ຫັກ |
| ອັບເດດເຟີມແວ | ສະຫນັບສະຫນູນ | ການເຊື່ອມຕໍ່ຫັກ |
| ໄດ້ຮັບຂໍ້ມູນ | ສະຫນັບສະຫນູນ | ບໍ່ມີຜົນກະທົບ |
| ຕັ້ງຄ່າຂໍ້ມູນອຸປະກອນ | ສະຫນັບສະຫນູນ | ບໍ່ມີຜົນກະທົບ |
| ການທົດສອບຕົນເອງ | ສະຫນັບສະຫນູນ | ບໍ່ມີຜົນກະທົບ |
i) ການທົດສອບຕົນເອງ
MIRCU-S24 ສະຫນັບສະຫນູນ 2 ຕົ້ນຕໍເພື່ອປະຕິບັດການທົດສອບດ້ວຍຕົນເອງພ້ອມກັນ. ເມື່ອປະຖົມທີ 1 ກຳລັງເຮັດການທົດສອບດ້ວຍຕົນເອງ, ປະຖົມທີ 2 ສາມາດສະແກນ, ປັບຕັ້ງ, ຕັ້ງການອຽງ, ຟື້ນຟູ L2/L7, ອັບເດດການຕັ້ງຄ່າ. file, ອັບເດດເຟີມແວ, ຮັບຂໍ້ມູນ MIRCU, ຕັ້ງຄ່າຂໍ້ມູນອຸປະກອນ ແລະການທົດສອບດ້ວຍຕົນເອງ.
ເມື່ອປະຖົມທີ 1 ກໍາລັງປະຕິບັດການທົດສອບດ້ວຍຕົນເອງ, ຖ້າຄໍາສັ່ງຕົ້ນຕໍທີ່ 2 ສົ່ງໄປຫາ MIRCU, ຜົນກະທົບຕໍ່ການປະຖົມ 1 ແມ່ນສະແດງຢູ່ໃນຕາຕະລາງຂ້າງລຸ່ມນີ້:
| 2nd ການປະຕິບັດຂັ້ນຕົ້ນ | ຖ້າ MIRCU ສະຫນັບສະຫນູນ | ຜົນກະທົບ 1st ປະຖົມ |
| ສະແກນ | ສະຫນັບສະຫນູນ | ບໍ່ມີຜົນກະທົບ |
| ການປັບທຽບ | ສະຫນັບສະຫນູນ | ບໍ່ມີຜົນກະທົບ |
| ຕັ້ງ Tilt | ສະຫນັບສະຫນູນ | ບໍ່ມີຜົນກະທົບ |
| L2 / L7 ການຟື້ນຟູ | ສະຫນັບສະຫນູນ | ບໍ່ມີຜົນກະທົບ |
| ອັບເດດການຕັ້ງຄ່າ File | ສະຫນັບສະຫນູນ | ການເຊື່ອມຕໍ່ຫັກ |
| ອັບເດດເຟີມແວ | ສະຫນັບສະຫນູນ | ການເຊື່ອມຕໍ່ຫັກ |
| ໄດ້ຮັບຂໍ້ມູນ | ສະຫນັບສະຫນູນ | ບໍ່ມີຜົນກະທົບ |
| ຕັ້ງຄ່າຂໍ້ມູນອຸປະກອນ | ສະຫນັບສະຫນູນ | ບໍ່ມີຜົນກະທົບ |
| ການທົດສອບຕົນເອງ | ສະຫນັບສະຫນູນ | ບໍ່ມີຜົນກະທົບ |
ການເຮັດວຽກໃນໂຫມດ AISG3.0
ສະຫຼຸບຫຍໍ້ຂອງການປະຕິບັດຂໍ້ຂັດແຍ່ງສໍາລັບ 2 ປະຖົມ (1 ແລະ 2nd Primary) ປະຕິບັດການ MIRCU-S24 ແມ່ນສະແດງຢູ່ໃນຕາຕະລາງຂ້າງລຸ່ມນີ້:
**ໝາຍເຫດ: "√" ແລະ "X" ທັງຫມົດທີ່ສະແດງແມ່ນສ່ວນໃຫຍ່ແມ່ນກ່ຽວຂ້ອງກັບການປະຖົມ 2, ເຊິ່ງຫມາຍຄວາມວ່າການດໍາເນີນການທີ່ສອດຄ້ອງກັນຫຼືບໍ່ (ສະແດງຕາມແນວນອນໃນຕາຕະລາງ) ສາມາດປະຕິບັດໄດ້ໃນປະຖົມທີ 2 ເມື່ອປະຖົມ 1 ກໍາລັງປະຕິບັດຄໍາສັ່ງຫຼືການປະຕິບັດທີ່ແນ່ນອນ. (ລະບຸໃນແນວຕັ້ງໃນຕາຕະລາງ). ຄໍາສັ່ງຂອງບູລິມະສິດຂອງ "ປະຖົມ" ບໍ່ແມ່ນການແກ້ໄຂແລະມັນຂຶ້ນກັບວ່າຕົ້ນຕໍຈະເລີ່ມຕົ້ນການປະຕິບັດຄັ້ງທໍາອິດ.
|
2nd ປະຖົມ
1st ປະຖົມ |
ສະແກນ |
Calibrati ເປີດ |
ຕັ້ງ Tilt |
ຣີເຊັດ ທ່າເຮືອ |
ຣີເຊັດ ALD |
ອັບໂຫຼດ |
ດາວໂລດ ງ |
MALD ກຳນົດຄ່າ e |
ປິງ |
|
ສະແກນ |
√ |
√ |
√ |
√ |
√ |
√ |
√ |
√ |
√ |
|
ການປັບທຽບ |
√ |
X |
X |
√ |
√ |
X |
X |
X |
X |
|
ຕັ້ງ Tilt |
√ |
X |
X |
√ |
√ |
X |
X |
X |
X |
|
ຣີເຊັດພອດ |
√ |
√ |
√ |
√ |
√ |
√ |
√ |
√ |
√ |
|
ຕັ້ງຄ່າໃໝ່ |
X |
X |
X |
X |
X |
X |
X |
X |
X |
|
ອັບໂຫຼດ |
√ |
X |
X |
√ |
√ |
X |
X |
X |
X |
|
ດາວໂຫຼດ |
X |
X |
X |
X |
X |
X |
X |
X |
X |
|
MALD Configure |
√ |
X |
X |
√ |
√ |
X |
X |
X |
X |
|
ປິງ |
√ |
X |
X |
√ |
√ |
X |
X |
X |
X |
X:ໝາຍເຫດ 1) MIRCU ບໍ່ສາມາດປະຕິບັດຄໍາສັ່ງຈາກ 2 ຕົ້ນຕໍທີ່ກ່ຽວຂ້ອງພ້ອມກັນ.
ມັນຂັດກັນແລະບໍ່ປະຕິບັດຕາມມາດຕະຖານ AISG.
ໝາຍ ເຫດ 2) 1 ຫຼັກສາມາດປະຕິບັດຄໍາສັ່ງຢ່າງສໍາເລັດຜົນ, ແຕ່ຄໍາສັ່ງທີ່ສົ່ງໂດຍຕົ້ນຕໍອື່ນບໍ່ສໍາເລັດ.
√: ຫມາຍເຫດ 1) MIRCU-S24 ສາມາດປະຕິບັດບັນດາຄໍາສັ່ງຈາກ 2 ຂັ້ນຕົ້ນຂອງຕົນພ້ອມກັນ, ແລະປະຕິບັດຕາມມາດຕະຖານ AISG.
ໝາຍ ເຫດ 2) 'ເມື່ອ “RESETALD” ຖືກເປີດໃຊ້ໃນປະຖົມທີ 2 ເມື່ອປະຖົມທີ 1 ກຳລັງດຳເນີນການ, ທຸກໆການກະທຳຢູ່ໃນປະຖົມທີ 1 ຈະຖືກລະງັບໄວ້.
a) ສະແກນ
MIRCU-S24 ຮອງຮັບ 2 ແກນຫຼັກເພື່ອສະແກນ MIRCU ພ້ອມກັນ. ເມື່ອການສະແກນຂັ້ນຕົ້ນທີ 1, ການດໍາເນີນງານໃນປະຖົມທີ 2 ບໍ່ໄດ້ຮັບຜົນກະທົບແລະມັນສາມາດສະແກນ, calibrate, ຕັ້ງອຽງ, ປັບພອດ, ປັບ ALD, ອັບໂຫລດ / ດາວໂຫລດ file, ຕັ້ງຄ່າ MALD ແລະ ping.
ໃນເວລາທີ່ປະຖົມ 1 ແມ່ນການສະແກນ, ຖ້າຄໍາສັ່ງຕົ້ນຕໍທີ່ 2 ສົ່ງໄປຫາ MIRCU, ຜົນກະທົບຕໍ່ການປະຖົມ 1 ແມ່ນສະແດງຢູ່ໃນຕາຕະລາງຂ້າງລຸ່ມນີ້:
| 2nd ການປະຕິບັດຂັ້ນຕົ້ນ | ຖ້າ MIRCU ສະຫນັບສະຫນູນ | ຜົນກະທົບ 1st ປະຖົມ |
| ສະແກນ | ສະຫນັບສະຫນູນ | ບໍ່ມີຜົນກະທົບ |
| ການປັບທຽບ | ສະຫນັບສະຫນູນ | ບໍ່ມີຜົນກະທົບ |
| ຕັ້ງ Tilt | ສະຫນັບສະຫນູນ | ບໍ່ມີຜົນກະທົບ |
| ຣີເຊັດພອດ | ສະຫນັບສະຫນູນ | ບໍ່ມີຜົນກະທົບ |
| ຕັ້ງຄ່າໃໝ່ | ສະຫນັບສະຫນູນ | ການເຊື່ອມຕໍ່ຫັກ |
| ອັບໂຫຼດ File | ສະຫນັບສະຫນູນ | ບໍ່ມີຜົນກະທົບ |
| ດາວໂຫຼດ File | ສະຫນັບສະຫນູນ | ການເຊື່ອມຕໍ່ຫັກ |
| MALD Configure | ສະຫນັບສະຫນູນ | ບໍ່ມີຜົນກະທົບ |
| PING | ສະຫນັບສະຫນູນ | ບໍ່ມີຜົນກະທົບ |
b) Calibrate
MIRCU-S24 ບໍ່ຮອງຮັບ 2 ແກນຫຼັກເພື່ອເຮັດການປັບທຽບພ້ອມໆກັນ. ເມື່ອປະຖົມທີ 1 ຖືກປັບ, ປະຖົມທີ 2 ສາມາດສະແກນ, ຣີເຊັດພອດ, ຣີເຊັດ ALD ແຕ່ບໍ່ສາມາດປັບປັບ, ຕັ້ງການອຽງ, ອັບໂຫຼດ/ດາວໂຫລດໄດ້. file, ຕັ້ງຄ່າ MALD ແລະ ping.
ໃນເວລາທີ່ປະຖົມ 1 ແມ່ນການປັບຕົວ, ຖ້າຄໍາສັ່ງຕົ້ນຕໍທີ່ 2 ສົ່ງໄປຫາ MIRCU, ຜົນກະທົບຕໍ່ການປະຖົມ 1 ແມ່ນສະແດງຢູ່ໃນຕາຕະລາງຂ້າງລຸ່ມນີ້:
| 2nd ການປະຕິບັດຂັ້ນຕົ້ນ | ຖ້າ MIRCU ສະຫນັບສະຫນູນ | ຜົນກະທົບ 1st ປະຖົມ |
| ສະແກນ | ສະຫນັບສະຫນູນ | ບໍ່ມີຜົນກະທົບ |
| ການປັບທຽບ | ກັບຄືນ "UseByAnotherPort" | ບໍ່ມີຜົນກະທົບ |
| ຕັ້ງ Tilt | ກັບຄືນ "UseByAnotherPort" | ບໍ່ມີຜົນກະທົບ |
| ຣີເຊັດພອດ | ສະຫນັບສະຫນູນ | ບໍ່ມີຜົນກະທົບ |
| ຕັ້ງຄ່າໃໝ່ | ສະຫນັບສະຫນູນ | ການເຊື່ອມຕໍ່ຫັກ |
| ອັບໂຫຼດ File | ກັບຄືນ "UseByAnotherPort" | ບໍ່ມີຜົນກະທົບ |
| ດາວໂຫຼດ File | ກັບຄືນ "UseByAnotherPort" | ບໍ່ມີຜົນກະທົບ |
| MALD Configure | ກັບຄືນ "UseByAnotherPort" | ບໍ່ມີຜົນກະທົບ |
| PING | ກັບຄືນ "UseByAnotherPort" | ບໍ່ມີຜົນກະທົບ |
c) ຕັ້ງ Tilt
MIRCU-S24 ບໍ່ຮອງຮັບ 2 ແກນຫຼັກເພື່ອຕັ້ງການອຽງພ້ອມກັນ. ເມື່ອປະຖົມທີ 1 ກໍາລັງຕັ້ງການອຽງ, ປະຖົມທີ 2 ສາມາດສະແກນ, ຣີເຊັດພອດ, ຣີເຊັດ ALD ແຕ່ບໍ່ສາມາດປັບປັບ, ຕັ້ງການອຽງ, ອັບໂຫຼດ/ດາວໂຫລດໄດ້. file, ຕັ້ງຄ່າ MALD ແລະ ping.
ເມື່ອປະຖົມທີ 1 ກໍາລັງຕັ້ງການອຽງ, ຖ້າຄໍາສັ່ງຕົ້ນຕໍທີ່ 2 ສົ່ງໄປຫາ MIRCU, ຜົນກະທົບຕໍ່ການປະຖົມ 1 ແມ່ນສະແດງຢູ່ໃນຕາຕະລາງຂ້າງລຸ່ມນີ້:
| 2nd ການປະຕິບັດຂັ້ນຕົ້ນ | ຖ້າ MIRCU ສະຫນັບສະຫນູນ | ຜົນກະທົບ 1st ປະຖົມ |
| ສະແກນ | ສະຫນັບສະຫນູນ | ບໍ່ມີຜົນກະທົບ |
| ການປັບທຽບ | ກັບຄືນ "UseByAnotherPort" | ບໍ່ມີຜົນກະທົບ |
| ຕັ້ງ Tilt | ກັບຄືນ "UseByAnotherPort" | ບໍ່ມີຜົນກະທົບ |
| ຣີເຊັດພອດ | ສະຫນັບສະຫນູນ | ບໍ່ມີຜົນກະທົບ |
| ຕັ້ງຄ່າໃໝ່ | ສະຫນັບສະຫນູນ | ການເຊື່ອມຕໍ່ຫັກ |
| ອັບໂຫຼດ File | ກັບຄືນ "UseByAnotherPort" | ບໍ່ມີຜົນກະທົບ |
| ດາວໂຫຼດ File | ກັບຄືນ "UseByAnotherPort" | ບໍ່ມີຜົນກະທົບ |
| MALD Configure | ກັບຄືນ "UseByAnotherPort" | ບໍ່ມີຜົນກະທົບ |
| PING | ກັບຄືນ "UseByAnotherPort" | ບໍ່ມີຜົນກະທົບ |
d) ຣີເຊັດ
AISG3.0 ມີ 2 ປະເພດຂອງການດໍາເນີນການ reset: ResetPort ແລະ ResetALD. ResetPort ພຽງແຕ່ຣີເຊັດພອດຄູ່ທີ່ເຊື່ອມຕໍ່ກັບພອດຫຼັກທີ 1 ຫຼື 2 ເທົ່ານັ້ນ ແລະບໍ່ມີຜົນຕໍ່ການເຮັດວຽກຂອງພອດຫຼັກອື່ນ. ResetALD ຣີເຊັດໂມດູນທັງໝົດ ແລະມັນຈະຣີສະຕາດ, ທັງສອງອັນຫຼັກຈະຖືກຕັດການເຊື່ອມຕໍ່.
e) ອັບໂຫຼດ (Fetch File ຈາກ Module)
ຄໍາສັ່ງອັບໂຫລດເລີ່ມຕົ້ນດ້ວຍ 'UploadStart' ແລະລົງທ້າຍດ້ວຍ 'UploadEnd'. ໄດ້ file ຖືກປະຕິບັດແລະອັບໂຫລດໂດຍໃຊ້ 'ອັບໂຫລດFile' ຄໍາສັ່ງ. ສະຫນັບສະຫນູນ file ປະເພດແມ່ນເຟີມແວFile ແລະຕັ້ງຄ່າFile. ໂມດູນບໍ່ຮອງຮັບຫຼາຍພອດ file ການປະຕິບັດການອັບໂຫລດພ້ອມໆກັນ, ຊຶ່ງຫມາຍຄວາມວ່າໃນເວລາທີ່ປະຖົມ 1st ດໍາເນີນການອັບໂຫລດ, ປະຖົມທີ່ 2 ຈະຢູ່ໃນ 'ສະຖານະການເຊື່ອມຕໍ່ທີ່ຈໍາກັດ'.
ເມື່ອການອັບໂຫລດປະຖົມທີ 1 file, ຖ້າຄໍາສັ່ງຕົ້ນຕໍທີ່ 2 ສົ່ງໄປຫາ MIRCU, ຜົນກະທົບຕໍ່ການປະຖົມ 1 ແມ່ນສະແດງຢູ່ໃນຕາຕະລາງຂ້າງລຸ່ມນີ້:
| 2nd ການປະຕິບັດຂັ້ນຕົ້ນ | ຖ້າ MIRCU ສະຫນັບສະຫນູນ | ຜົນກະທົບ 1st ປະຖົມ |
| ສະແກນ | ສະຫນັບສະຫນູນ | ບໍ່ມີຜົນກະທົບ |
| ການປັບທຽບ | ກັບຄືນ "ສະຖານະບໍ່ຖືກຕ້ອງ" | ບໍ່ມີຜົນກະທົບ |
| ຕັ້ງ Tilt | ກັບຄືນ "ສະຖານະບໍ່ຖືກຕ້ອງ" | ບໍ່ມີຜົນກະທົບ |
| ຣີເຊັດພອດ | ສະຫນັບສະຫນູນ | ບໍ່ມີຜົນກະທົບ |
| ຕັ້ງຄ່າໃໝ່ | ສະຫນັບສະຫນູນ | ການເຊື່ອມຕໍ່ຫັກ |
| ອັບໂຫຼດ File | ກັບຄືນ "ສະຖານະບໍ່ຖືກຕ້ອງ" | ບໍ່ມີຜົນກະທົບ |
| ດາວໂຫຼດ File | ກັບຄືນ "ສະຖານະບໍ່ຖືກຕ້ອງ" | ບໍ່ມີຜົນກະທົບ |
| MALD Configure | ກັບຄືນ "ສະຖານະບໍ່ຖືກຕ້ອງ" | ບໍ່ມີຜົນກະທົບ |
| PING | ກັບຄືນ "ສະຖານະບໍ່ຖືກຕ້ອງ" | ບໍ່ມີຜົນກະທົບ |
f) ດາວໂຫລດ (ດາວໂຫລດ file ໂມດູນ)
ໄດ້ file ຄໍາສັ່ງດາວໂຫຼດເລີ່ມຕົ້ນດ້ວຍ 'DownloadStart' ແລະສິ້ນສຸດດ້ວຍ 'DownloadEnd'. ໄດ້ file ຖືກປະຕິບັດແລະດາວໂຫຼດໂດຍໃຊ້ 'ດາວໂຫລດFile' ຄໍາສັ່ງ. ສະຫນັບສະຫນູນ file ປະເພດແມ່ນເຟີມແວFile ແລະຕັ້ງຄ່າFile. ໂມດູນບໍ່ຮອງຮັບຫຼາຍພອດ file ການດໍາເນີນງານການດາວໂຫຼດພ້ອມກັນ, ຊຶ່ງຫມາຍຄວາມວ່າໃນເວລາທີ່ປະຖົມທໍາອິດທີ່ 1 ການດາວໂຫຼດ, ພອດຕົ້ນຕໍທີ່ 2 ຈະປິດແລະບໍ່ມີການດໍາເນີນການທີ່ສາມາດເຮັດໄດ້.
g) MALD Configure
ເມື່ອການຕັ້ງຄ່າ MALD ຖືກປະຕິບັດຢູ່ໃນໂມດູນ, ສິດອໍານາດການເຂົ້າເຖິງຂອງພອດໂມດູນກັບແຕ່ລະຫນ່ວຍຍ່ອຍຂອງເສົາອາກາດສາມາດຖືກຕັ້ງຄ່າໄດ້. ເມື່ອການປະຕິບັດການປັບຄ່າ MALD ຖືກປະຕິບັດຢູ່ໃນປະຖົມທີ 1, ປະຖົມທີ 2 ຈະຢູ່ໃນ
'ສະຖານະການເຊື່ອມຕໍ່ຖືກຈຳກັດ'.
ເມື່ອປະຖົມທີ 1 ກໍາລັງຕັ້ງຄ່າ MALD, ຖ້າຄໍາສັ່ງຕົ້ນຕໍທີ່ 2 ສົ່ງໄປຫາ MIRCU, ຜົນກະທົບຂອງປະຖົມທໍາອິດແມ່ນສະແດງຢູ່ໃນຕາຕະລາງຂ້າງລຸ່ມນີ້:
| 2nd ການປະຕິບັດຂັ້ນຕົ້ນ | ຖ້າ MIRCU ສະຫນັບສະຫນູນ | ຜົນກະທົບ 1st ປະຖົມ |
| ສະແກນ | ສະຫນັບສະຫນູນ | ບໍ່ມີຜົນກະທົບ |
| ການປັບທຽບ | ກັບຄືນ "ສະຖານະບໍ່ຖືກຕ້ອງ" | ບໍ່ມີຜົນກະທົບ |
| ຕັ້ງ Tilt | ກັບຄືນ "ສະຖານະບໍ່ຖືກຕ້ອງ" | ບໍ່ມີຜົນກະທົບ |
| ຣີເຊັດພອດ | ສະຫນັບສະຫນູນ | ບໍ່ມີຜົນກະທົບ |
| ຕັ້ງຄ່າໃໝ່ | ສະຫນັບສະຫນູນ | ການເຊື່ອມຕໍ່ຫັກ |
| ອັບໂຫຼດ File | ກັບຄືນ "ສະຖານະບໍ່ຖືກຕ້ອງ" | ບໍ່ມີຜົນກະທົບ |
| ດາວໂຫຼດ File | ກັບຄືນ "ສະຖານະບໍ່ຖືກຕ້ອງ" | ບໍ່ມີຜົນກະທົບ |
| MALD Configure | ກັບຄືນ "ສະຖານະບໍ່ຖືກຕ້ອງ" | ບໍ່ມີຜົນກະທົບ |
| PING | ກັບຄືນ "ສະຖານະບໍ່ຖືກຕ້ອງ" | ບໍ່ມີຜົນກະທົບ |
h) ປິງ
ເມື່ອປະຖົມທີ 1 ປະຕິບັດການ PING, ປະຖົມທີ 2 ຈະຢູ່ໃນ 'ສະຖານະການເຊື່ອມຕໍ່ທີ່ຖືກຈຳກັດ'. ກະລຸນາອ້າງອີງເຖິງ AISG3.0 protocol ສໍາລັບລາຍລະອຽດການດໍາເນີນງານ PING. ເມື່ອປະຖົມ 1 ປະຕິບັດ ping, ຖ້າຄໍາສັ່ງຕົ້ນຕໍທີ່ 2 ສົ່ງໄປຫາ MIRCU, ຜົນກະທົບຕໍ່ການປະຖົມ 1 ແມ່ນສະແດງຢູ່ໃນຕາຕະລາງຂ້າງລຸ່ມນີ້:
|
2nd ການປະຕິບັດຂັ້ນຕົ້ນ |
ຖ້າ MIRCU ສະຫນັບສະຫນູນ |
ຜົນກະທົບ 1st ປະຖົມ |
| ສະແກນ | ສະຫນັບສະຫນູນ | ບໍ່ມີຜົນກະທົບ |
| ການປັບທຽບ | ກັບຄືນ "ສະຖານະບໍ່ຖືກຕ້ອງ" | ບໍ່ມີຜົນກະທົບ |
| ຕັ້ງ Tilt | ກັບຄືນ "ສະຖານະບໍ່ຖືກຕ້ອງ" | ບໍ່ມີຜົນກະທົບ |
| ຣີເຊັດພອດ | ສະຫນັບສະຫນູນ | ບໍ່ມີຜົນກະທົບ |
| ຕັ້ງຄ່າໃໝ່ | ສະຫນັບສະຫນູນ | ການເຊື່ອມຕໍ່ຫັກ |
| ອັບໂຫຼດ File | ກັບຄືນ "ສະຖານະບໍ່ຖືກຕ້ອງ" | ບໍ່ມີຜົນກະທົບ |
| ດາວໂຫຼດ File | ກັບຄືນ "ສະຖານະບໍ່ຖືກຕ້ອງ" | ບໍ່ມີຜົນກະທົບ |
| MALD Configure | ກັບຄືນ "ສະຖານະບໍ່ຖືກຕ້ອງ" | ບໍ່ມີຜົນກະທົບ |
| PING | ກັບຄືນ "ສະຖານະບໍ່ຖືກຕ້ອງ" | ບໍ່ມີຜົນກະທົບ |
ການຕິດຕັ້ງ ແລະການເຊື່ອມຕໍ່ MIRCU
ຄວາມຕ້ອງການຕິດຕັ້ງ
ຄວບຄຸມຄວາມຕ້ອງການສາຍ
- ຕົວເຊື່ອມຕໍ່ສາຍຄວບຄຸມ:
ຕອບສະຫນອງຄວາມຕ້ອງການຂອງ IEC60130-9 8-pin connector. ການສິ້ນສຸດຂອງສາຍເຄເບີ້ນແມ່ນອົງປະກອບຂອງຕົວເຊື່ອມຕໍ່ຊາຍແລະຍິງ, ຕົວເຊື່ອມຕໍ່ແລະຫຼັກສາຍເຄເບີ້ນທີ່ຕອບສະຫນອງຄວາມຕ້ອງການມາດຕະຖານການໂຕ້ຕອບຂອງ AISG. - ສາຍ:
ອົງປະກອບຂອງ 5 ຫຼັກທີ່ມີໂລຫະແລະພາດສະຕິກຊັ້ນປ້ອງກັນສາຍປ້ອງກັນ, ຄວາມຕ້ອງການເສັ້ນຜ່າສູນກາງຫຼັກ: 3 × 0.75mm + 2 × 0.32mm. - ຊັ້ນປົກປ້ອງ:
IP65
ການສະຫນອງພະລັງງານ
MIRCU Input Power: DC +10 V ~ +30 V
ເຄື່ອງມືການຕິດຕັ້ງ
32mm Torque wrench x 1.
ການຕິດຕັ້ງ MIRCU-S24
ຂັ້ນຕອນການຕິດຕັ້ງ MIRCU-S24 ແລະວິທີການ
a) ດັ່ງທີ່ສະແດງຢູ່ໃນຮູບທີ 2, ໂລໂກ້ “AISG OUT” ຢູ່ເທິງໜ້າປົກເສົາອາກາດຕ້ອງສອດຄ່ອງກັບ MIRCU “IN” ແລະ “OUT”, ຈາກນັ້ນໃສ່ MIRCU ເຂົ້າໄປໃນຊ່ອງສຽບເສົາອາກາດ.
 b) ດັ່ງທີ່ສະແດງຢູ່ໃນຮູບທີ 3, ໃຫ້ແຫນ້ນ screws ໃນ MIRCU ໂດຍໃຊ້ screwdriver ປະເພດ slotted.
b) ດັ່ງທີ່ສະແດງຢູ່ໃນຮູບທີ 3, ໃຫ້ແຫນ້ນ screws ໃນ MIRCU ໂດຍໃຊ້ screwdriver ປະເພດ slotted.  c) ດັ່ງທີ່ສະແດງຢູ່ໃນຮູບທີ 4, ເຊື່ອມຕໍ່ສາຍຄວບຄຸມກັບ AISG Connector ຊອກຫາຢູ່ສ່ວນລຸ່ມຂອງ MIRCU ແລະແຫນ້ນຕົວເຊື່ອມຕໍ່.
c) ດັ່ງທີ່ສະແດງຢູ່ໃນຮູບທີ 4, ເຊື່ອມຕໍ່ສາຍຄວບຄຸມກັບ AISG Connector ຊອກຫາຢູ່ສ່ວນລຸ່ມຂອງ MIRCU ແລະແຫນ້ນຕົວເຊື່ອມຕໍ່.
 d) ຖ້າຫາກວ່າມີຫຼາຍກ່ວາຫນຶ່ງ MIRCU ຈໍາເປັນຕ້ອງໄດ້ເຊື່ອມຕໍ່, daisy- chained cascade ວິທີການສາມາດຖືກນໍາໃຊ້ເປັນສະແດງໃຫ້ເຫັນໃນຮູບ 5.
d) ຖ້າຫາກວ່າມີຫຼາຍກ່ວາຫນຶ່ງ MIRCU ຈໍາເປັນຕ້ອງໄດ້ເຊື່ອມຕໍ່, daisy- chained cascade ວິທີການສາມາດຖືກນໍາໃຊ້ເປັນສະແດງໃຫ້ເຫັນໃນຮູບ 5. ຮູບທີ 5 ຫຼາຍ MIRCU Daisy-Chain Cascade Schematic Diagram
ຮູບທີ 5 ຫຼາຍ MIRCU Daisy-Chain Cascade Schematic Diagram
**ໝາຍເຫດ: ສາຍຄວບຄຸມ ແລະຕົວເຊື່ອມຕໍ່ MIRCU ຢູ່ທັງສອງສົ້ນແມ່ນຕົວເຊື່ອມຕໍ່ເພດຊາຍ ແລະເພດຍິງ. ຕົວເຊື່ອມຕໍ່ເພດຊາຍ MIRCU ໃຊ້ເພື່ອຮັບສັນຍານເຂົ້າ ແລະເຊື່ອມຕໍ່ກັບຕົວເຊື່ອມຕໍ່ເພດຍິງຂອງສາຍຄວບຄຸມ; ຕົວເຊື່ອມຕໍ່ແມ່ຂອງ MIRCU ໃຊ້ເພື່ອສົ່ງສັນຍານອອກ ແລະສາຍເປັນຊຸດໄປຫາ MIRCU ອື່ນໂດຍໃຊ້ຕົວເຊື່ອມຕໍ່ສາຍຊາຍ. ສາຍຄວບຄຸມຈາກ PCU ພຽງແຕ່ສາມາດເຊື່ອມຕໍ່ກັບຕົວເຊື່ອມຕໍ່ຊາຍຂອງ MIRCU.
e) ກັນນ້ໍາ: ທໍາອິດ, ຫໍ່ tape ກັນນ້ໍາ 3 ຊັ້ນ, ຫຼັງຈາກນັ້ນຫໍ່ 3 ຊັ້ນຂອງ tape insulating, fastened ກັບສາຍເຄເບີ້ນຢູ່ທັງສອງສົ້ນ.
ການເຊື່ອມຕໍ່ລະຫວ່າງ MIRCU, PCU ແລະລະບົບເສົາອາກາດ
ການເຊື່ອມຕໍ່ລະຫວ່າງ MIRCU, PCU ແລະການເຊື່ອມຕໍ່ລະບົບເສົາອາກາດແມ່ນສະແດງຢູ່ໃນຮູບ 6. ມີ 3 ການເຊື່ອມຕໍ່, ຄື:
ຮູບ 6(a): MIRCU ເຊື່ອມຕໍ່ໂດຍກົງກັບ PCU ຜ່ານສາຍຄວບຄຸມ;
ຮູບ 6(b): MIRCU ເຊື່ອມຕໍ່ກັບລະບົບເສົາອາກາດ SBT (Smart Bias-T), PCU ແລະອຸປະກອນສະຖານີຖານທີ່ເຊື່ອມຕໍ່ກັບໃນຕອນທ້າຍຂອງ SBT, ສັນຍານການຄວບຄຸມໄດ້ສົ່ງຜ່ານ feeder RF.
ຮູບ 6(c): MIRCU ເຊື່ອມຕໍ່ກັບການໂຕ້ຕອບ AISG ເປີດໃຊ້ TMA, PCU ແລະອຸປະກອນສະຖານີຖານທີ່ເຊື່ອມຕໍ່ກັບໃນຕອນທ້າຍຂອງ SBT, ສັນຍານການຄວບຄຸມໄດ້ສົ່ງຜ່ານ feeder RF.  ການສ້າງແຜນທີ່ຂອງ MIRCU ກັບ Phase Shifter
ການສ້າງແຜນທີ່ຂອງ MIRCU ກັບ Phase Shifter
Comba ທີ່ມີຢູ່ແລ້ວ MIRCU ສາມາດຕອບສະຫນອງ 1 ຫາ 8 RET ໄລຍະການຄວບຄຸມ shifter, ແລະຈະໄດ້ຮັບການຍົກລະດັບເພື່ອສະຫນັບສະຫນູນເຖິງ 20 ການຄວບຄຸມໄລຍະ shifter ໃນອະນາຄົດອັນໃກ້ນີ້ໂດຍຜ່ານການຍົກລະດັບເຟີມແວ, ຄາດວ່າຈະເຮັດໃນ Q2 2021. ການຄວບຄຸມແລະຊິບໄດເວີທັງຫມົດແມ່ນປະສົມປະສານເຂົ້າໄປໃນດຽວ. ໂມດູນ MIRCU. ລັກສະນະສະເພາະຂອງພີ່ນ້ອງແມ່ນສະແດງຢູ່ໃນຕາຕະລາງ 2.
| ພາລາມິເຕີ
ຜະລິດຕະພັນ |
ໝາຍເລກໜ່ວຍງານຄວບຄຸມການຂັບຂີ່ລົດຈັກ |
ເສົາອາກາດ RET ທີ່ເຫມາະສົມ |
ລັກສະນະການຕິດຕັ້ງ |
|
MIRCU-S24 |
2 |
1 ຫາ 8 ແຖບຄວາມຖີ່ສ້າງໃນ RCU RET Antenna. ສາມາດອັບເກຣດໄດ້ເປັນ 20 ແຖບຄວາມຖີ່ໃນອະນາຄົດ. |
ສຽບແລະຫຼິ້ນ |
ຕາຕະລາງ 2 MIRCU ກ່ຽວຂ້ອງກັບຄວາມເໝາະສົມຂອງເສົາອາກາດ
ຜະລິດຕະພັນ Comba MIRCU, ດັ່ງທີ່ສະແດງຢູ່ໃນຮູບທີ 7 ແລະຮູບ 8, ໃຊ້ການໃຊ້ງານຂອງເຕົ້າຮັບ, ເພື່ອຮັບຮູ້ຟັງຊັນ plug-and-play ເຊິ່ງ MIRCU ສາມາດຕິດຕັ້ງຫຼືຖອນການຕິດຕັ້ງໄດ້ງ່າຍ. ມັນຊ່ວຍເພີ່ມຄວາມຫນ້າເຊື່ອຖືຂອງຜະລິດຕະພັນຢ່າງຫຼວງຫຼາຍໃນການເຊື່ອມຕໍ່ແລະການນໍາໃຊ້. ນອກຈາກນີ້, ການບໍາລຸງຮັກສາແມ່ນງ່າຍດາຍຫຼາຍ.  ແຕ່ລະຫນ່ວຍຂັບ / ມໍເຕີມາພ້ອມກັບຫມາຍເລກລໍາດັບຂອງຕົນເອງ. ສໍາລັບຮູບ 9 ຂ້າງລຸ່ມນີ້, 8 ຊຸດຂອງຕົວເລກ serial ຈະສະແດງຢູ່ໃນ PCU ເມື່ອເຊື່ອມຕໍ່.
ແຕ່ລະຫນ່ວຍຂັບ / ມໍເຕີມາພ້ອມກັບຫມາຍເລກລໍາດັບຂອງຕົນເອງ. ສໍາລັບຮູບ 9 ຂ້າງລຸ່ມນີ້, 8 ຊຸດຂອງຕົວເລກ serial ຈະສະແດງຢູ່ໃນ PCU ເມື່ອເຊື່ອມຕໍ່.  ສາຍຄວບຄຸມ MIRCU, ສາຍປ້ອງກັນຟ້າຜ່າ ແລະສາຍດິນ
ສາຍຄວບຄຸມ MIRCU, ສາຍປ້ອງກັນຟ້າຜ່າ ແລະສາຍດິນ
ສາຍຄວບຄຸມ, ການປ້ອງກັນຟ້າຜ່າ ແລະຄວາມຕ້ອງການສາຍດິນ
ສາຍຄວບຄຸມ MIRCU ສາມາດເຊື່ອມຕໍ່ຜ່ານ SBT ຫຼື TMA (ດັ່ງທີ່ສະແດງຢູ່ໃນຮູບ 6 (b), (c)), ສາຍຄວບຄຸມໂດຍປົກກະຕິຈະສັ້ນແລະບໍ່ເກີນ 2m, ການປ້ອງກັນແສງສະຫວ່າງແລະສາຍດິນຈະຖືກປະຕິບັດຕາມຕົວປ້ອນ RF ແລະເພາະສະນັ້ນມັນ. ບໍ່ຈໍາເປັນສໍາລັບສາຍຄວບຄຸມເພື່ອປະຕິບັດການປ້ອງກັນຟ້າຜ່າແລະດິນອີກເທື່ອຫນຶ່ງ.
ຢ່າງໃດກໍຕາມ, ຖ້າ MIRCU ແລະສາຍຄວບຄຸມຖືກເຊື່ອມຕໍ່ຕາມຮູບ 6 (a), ເຊິ່ງສາຍຄວບຄຸມເຊື່ອມຕໍ່ກັບ RCU ໂດຍກົງ, ຫຼັງຈາກນັ້ນ, ມັນເປັນສິ່ງຈໍາເປັນສໍາລັບການຄວບຄຸມສາຍເພື່ອດໍາເນີນການກັບການປົກປ້ອງຟ້າຜ່າແລະຄວາມຕ້ອງການດິນ. ລາຍລະອຽດດັ່ງນີ້:
- a) ສາຍຄວບຄຸມທີ່ເຊື່ອມຕໍ່ກັບເສົາອາກາດຂອງສະຖານີຖານຄວນຈະຢູ່ໃນຂອບເຂດຂອງການປ້ອງກັນຂອງສະຖານີອາກາດ. terminals ທາງອາກາດຈະຕ້ອງສ້າງຕັ້ງ deflectors ໃນປັດຈຸບັນຟ້າຜ່າພິເສດ, ວັດສະດຸທີ່ເຫມາະສົມແມ່ນ 4mm x 40 mm ເຫຼັກຮາບພຽງ galvanized.
- b) ການຄວບຄຸມສາຍເຄເບີນໂລຫະກາບຄວນຈະເປັນ clamp ກັບຊຸດສາຍດິນພາຍໃນ 1m ຂອງເສົາອາກາດ, 1m ພາຍໃນຖາດສາຍຢູ່ທາງລຸ່ມຂອງ tower, ແລະ 1m ກ່ອນທີ່ຈະເຂົ້າໄປໃນທີ່ພັກອາໄສຂອງສະຖານີຖານ. ໃຫ້ແນ່ໃຈວ່າມີການຕິດຕັ້ງສາຍເຄເບີນດິນເປັນຊັບສິນ, ປ່ອງຢ້ຽມ feeder ຂອງຫ້ອງທີ່ພັກອາໄສຄວນຢູ່ໃກ້ກັບພື້ນດິນແລະເຊື່ອມຕໍ່ຢ່າງຖືກຕ້ອງກັບແຖບດິນທີ່ນໍາໄປສູ່ຫນ້າດິນ. (ເບິ່ງຮູບ 10)
 c) ກາບໂລຫະສາຍຄວບຄຸມຕິດກັບຊຸດສາຍດິນຕາມທີ່ສະແດງໃນຮູບ 11.
c) ກາບໂລຫະສາຍຄວບຄຸມຕິດກັບຊຸດສາຍດິນຕາມທີ່ສະແດງໃນຮູບ 11.
ຂັ້ນຕອນການຕິດຕັ້ງຊຸດສາຍດິນ
- ກ) ກະກຽມຊຸດພື້ນ, ດັ່ງທີ່ສະແດງໃນຮູບທີ 12 1a.
- b) ເຮັດຄວາມສະອາດກາບພາດສະຕິກຂອງສາຍຄວບຄຸມ, ຕັດກາບພາດສະຕິກດ້ວຍເຄື່ອງມື stripper ທີ່ເຫມາະສົມ, expose sheath braid ໂລຫະຂອງສາຍຄວບຄຸມ, ມີຄວາມຍາວປະມານ 22mm, ດັ່ງທີ່ສະແດງຢູ່ໃນຮູບ 12 1b.
- c) ເອົາແຜ່ນປ້ອງກັນໃສ່ຊຸດພື້ນດິນ, clampເອົາຊຸດສາຍດິນອ້ອມຮອບສາຍຄວບຄຸມ, ແລະຈັດວາງດ້ວຍເສັ້ນດ່າງຕາມຮູບທີ່ 13.
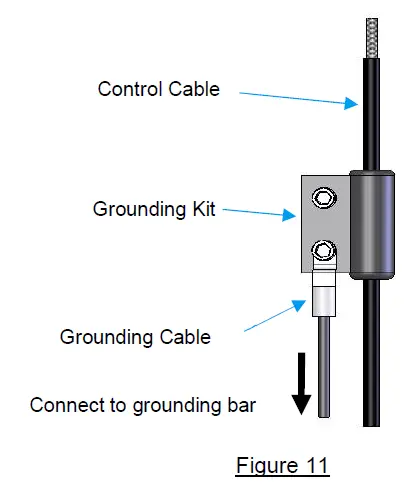
- d) ຮັດສະກູຂອງຊຸດສາຍດິນໃຫ້ແໜ້ນ, ດັ່ງທີ່ສະແດງໃນຮູບທີ 14.
- e) ເຊື່ອມຕໍ່ແລະຮັດສາຍເຄເບີນໃສ່ກັບແຖບດິນທີ່ຕັ້ງຢູ່ລຸ່ມສຸດຂອງຫໍຄອຍ.
**ໝາຍເຫດ: ສາຍຄວບຄຸມຄວນຢູ່ໃນຕໍາແຫນ່ງຕັ້ງຊື່ໃນຂະນະທີ່ clampກັບຊຸດພື້ນດິນ.

ການຂົນສົ່ງແລະການເກັບຮັກສາ
ການຂົນສົ່ງ
ອຸປະກອນສາມາດເປັນການຂົນສົ່ງໂດຍລົດ, ລົດໄຟ, ເຮືອ, ເຮືອບິນຫຼືຍານພາຫະນະການຂົນສົ່ງອື່ນໆ. ປ້ອງກັນຝົນ, ຫຼີກເວັ້ນການສັ່ນສະເທືອນຫຼາຍເກີນໄປແລະຜົນກະທົບໃນລະຫວ່າງການຂົນສົ່ງ. ຈັດການກັບຄວາມລະມັດລະວັງໃນຂະນະທີ່ການໂຫຼດແລະ unloading, ຢ່າງເຂັ້ມງວດຫຼີກເວັ້ນການຫຼຸດລົງຈາກທີ່ສູງແລະການຈັດການຫຍາບຄາຍອື່ນໆ.
ການເກັບຮັກສາ
ອຸປະກອນຫຸ້ມຫໍ່ຄວນຈະຖືກຈັດໃສ່ໃນພື້ນທີ່ແຫ້ງແລ້ງແລະລະບາຍອາກາດ, ອາກາດລ້ອມຮອບໂດຍບໍ່ມີອາຊິດ, ເປັນດ່າງແລະອາຍແກັສ corrosive ອື່ນໆ. ການວາງກ່ອງຕ້ອງປະຕິບັດຕາມຂໍ້ກໍາຫນົດໃນກ່ອງ. ໄລຍະເວລາການເກັບຮັກສາບໍ່ຄວນເກີນ 2 ປີ, ດີທີ່ເກັບຮັກສາໄວ້ຫຼາຍກວ່າ 2 ປີຈະຕ້ອງຜ່ານການທົດສອບການກວດກາຄືນໃຫມ່ກ່ອນທີ່ຈະນໍາໃຊ້.
ຂໍ້ຄວນລະວັງ ແລະໝາຍເຫດ
ຂໍ້ຄວນລະວັງ
ຂໍ້ຄວນລະວັງ: ຜູ້ໃຊ້ໄດ້ຖືກເຕືອນວ່າການປ່ຽນແປງຫຼືການດັດແກ້ທີ່ບໍ່ໄດ້ຮັບການອະນຸມັດຢ່າງຈະແຈ້ງໂດຍພາກສ່ວນທີ່ຮັບຜິດຊອບຕໍ່ການປະຕິບັດຕາມນັ້ນອາດຈະເຮັດໃຫ້ສິດອໍານາດຂອງຜູ້ໃຊ້ໃນການດໍາເນີນງານອຸປະກອນ.
ອຸປະກອນນີ້ປະຕິບັດຕາມພາກທີ 15 ຂອງກົດລະບຽບ FCC. ການເຮັດວຽກແມ່ນຂຶ້ນກັບສອງເງື່ອນໄຂຕໍ່ໄປນີ້: (1) ອຸປະກອນນີ້ອາດຈະບໍ່ເຮັດໃຫ້ເກີດການລົບກວນທີ່ເປັນອັນຕະລາຍ, ແລະ (2) ອຸປະກອນນີ້ຕ້ອງຍອມຮັບການແຊກແຊງໃດໆທີ່ໄດ້ຮັບ, ລວມທັງການລົບກວນທີ່ອາດຈະເຮັດໃຫ້ເກີດການດໍາເນີນການທີ່ບໍ່ປາດຖະຫນາ.
ໝາຍເຫດ
ໝາຍເຫດ: ອຸປະກອນນີ້ໄດ້ຮັບການທົດສອບແລະພົບເຫັນວ່າປະຕິບັດຕາມຂໍ້ຈໍາກັດສໍາລັບອຸປະກອນດິຈິຕອນ B Class B, ຕາມພາກທີ 15 ຂອງກົດລະບຽບ FCC. ຂໍ້ຈໍາກັດເຫຼົ່ານີ້ຖືກອອກແບບມາເພື່ອສະຫນອງການປົກປ້ອງທີ່ສົມເຫດສົມຜົນຕໍ່ການແຊກແຊງທີ່ເປັນອັນຕະລາຍໃນການຕິດຕັ້ງທີ່ຢູ່ອາໄສ. ອຸປະກອນນີ້ສ້າງ, ໃຊ້ແລະສາມາດແຜ່ກະຈາຍພະລັງງານຄວາມຖີ່ວິທະຍຸແລະ, ຖ້າຫາກວ່າບໍ່ໄດ້ຕິດຕັ້ງແລະນໍາໃຊ້ຕາມຄໍາແນະນໍາ, ອາດຈະເຮັດໃຫ້ເກີດການຂັດຂວາງການສື່ສານວິທະຍຸເປັນອັນຕະລາຍ. ຢ່າງໃດກໍ່ຕາມ, ບໍ່ມີການຮັບປະກັນວ່າການແຊກແຊງຈະບໍ່ເກີດຂື້ນໃນການຕິດຕັ້ງໂດຍສະເພາະ.
ຖ້າອຸປະກອນນີ້ເຮັດໃຫ້ເກີດການລົບກວນທີ່ເປັນອັນຕະລາຍຕໍ່ການຮັບວິທະຍຸຫຼືໂທລະພາບ, ເຊິ່ງສາມາດຖືກກໍານົດໂດຍການປິດແລະເປີດອຸປະກອນ, ຜູ້ໃຊ້ໄດ້ຖືກຊຸກຍູ້ໃຫ້ພະຍາຍາມແກ້ໄຂການລົບກວນໂດຍຫນຶ່ງຫຼືຫຼາຍມາດຕະການຕໍ່ໄປນີ້:
- Reorient ຫຼືຍ້າຍເສົາອາກາດຮັບ.
- ເພີ່ມການແຍກຕ່າງຫາກລະຫວ່າງອຸປະກອນແລະເຄື່ອງຮັບ.
- ເຊື່ອມຕໍ່ອຸປະກອນເຂົ້າໄປໃນເຕົ້າສຽບຢູ່ໃນວົງຈອນທີ່ແຕກຕ່າງຈາກທີ່ເຄື່ອງຮັບໄດ້ຖືກເຊື່ອມຕໍ່.
ເອກະສານ / ຊັບພະຍາກອນ
 |
Comba MIRCU-S24 ໜ່ວຍຄວບຄຸມໄລຍະໄກຫຼາຍພາຍໃນ [pdf] ຄູ່ມືຜູ້ໃຊ້ MIRCU-S24, MIRCUS24, PX8MIRCU-S24, PX8MIRCUS24, MIRCU-S24 Multi internal Remote Control Unit, Multi internal Remote Control Unit, ຫນ່ວຍຄວບຄຸມໄລຍະໄກ, ຫນ່ວຍຄວບຄຸມ |



