![]()
សៀវភៅណែនាំអ្នកប្រើប្រាស់ Pickerbot Pro
សូមចំណាំថារូបភាពដែលបានបង្ហាញគឺសម្រាប់គោលបំណងបង្ហាញតែប៉ុណ្ណោះ*។
អ្នកនិពន្ធ៖ Wayne Liu, Reilly Smithers
ថ្ងៃទី 3 ខែកក្កដា ឆ្នាំ 2024
សង្ខេប
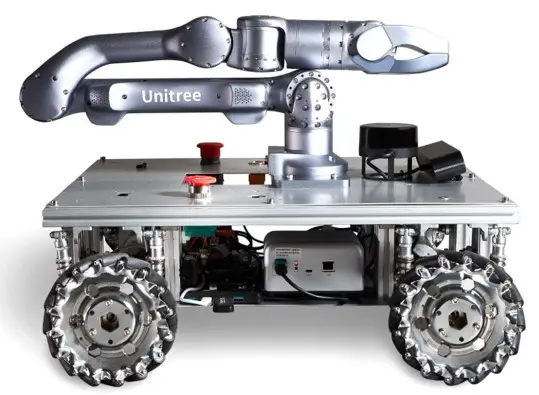
Pickerbot Pro គឺជាវេទិការមនុស្សយន្ត R&D ដែលអាចប្រើប្រាស់បានសម្រាប់កម្មវិធីជាច្រើន ទាំងនៅខាងក្រៅដូចជា កសិកម្ម ការជីកយករ៉ែ និងសំណង់ និងក្នុងផ្ទះ រួមទាំងការដឹកជញ្ជូនជំនួយដោយមនុស្សយន្ត ការបង្ហាញការស្វែងរក និងការសង្គ្រោះ និងការគូសផែនទី។
បំពាក់ដោយដៃមនុស្សយន្ត Unitree Z1 Pro ជាមួយនឹងការឈានដល់កម្រិត 740mm និងសមត្ថភាពផ្ទុកទម្ងន់ 3 គីឡូក្រាម Pickerbot Pro ផ្តល់នូវភាពទាក់ទាញគួរឱ្យចាប់អារម្មណ៍ជាមួយនឹង 6 ដឺក្រេនៃសេរីភាព រួមជាមួយនឹងការឆ្លើយតបដោយកម្លាំង និងសមត្ថភាពរកឃើញការប៉ះទង្គិច។
ដំណើរការដោយ NVIDIA Jetson Orin series single-board-computer (Nano ឬ NX variant) វាផ្តល់នូវចក្ខុវិស័យកុំព្យូទ័រកម្រិតខ្ពស់ជាងមុន និងការរៀនម៉ាស៊ីនជាមួយនឹងក្រាហ្វិកដ៏មានអានុភាព ឬមុខងារកុំព្យូទ័រប៉ារ៉ាឡែលដោយប្រើ CUDA ខណៈពេលដែលរក្សាបាននូវការរចនាតូច និងស្រាល។
Pickerbot Pro ត្រូវបានបំពាក់ដោយកាមេរ៉ា Orbbec 3D Astra ដែលផ្តល់នូវការចាប់ជំរិត ការតាមដានវត្ថុ និងសមត្ថភាពសម្គាល់កាយវិការ។
បង្កើតឡើងនៅលើតួដ៏រឹងមាំ ប៉ុន្តែមានទម្ងន់ស្រាល Pickerbot Pro មានបំពាក់ប្រព័ន្ធ 4WD ជាមួយនឹងការព្យួរឯករាជ្យសម្រាប់ការធ្វើនាវាចរណ៍កាន់តែប្រសើរឡើងនៅលើផ្ទៃដីមិនស្មើគ្នា។ កង់ mecanum ធំផ្តល់នូវចលនា omnidirectional ច្បាស់លាស់ ប៉ុន្តែការក្តាប់ខ្ពស់។
សមាសធាតុសំខាន់ៗ និងផ្នែករឹង
1.1 ROS 2 Controller៖ NVIDIA Jetson Orin (NX 8GB ឬ Nano 4GB)
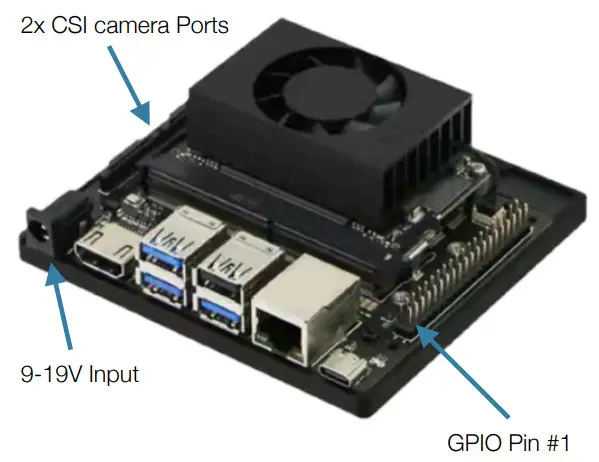
កុំព្យូទ័របន្ទះតែមួយ Jetson Orin ផ្តល់ការបញ្ចូលក្នុងកុំព្យូទ័រដ៏មានអានុភាពដល់ Pickerbot Pro ។ វាភ្ជាប់មកជាមួយ SSD ទំហំ 128gb, កាត Intel Wireless និងអង់តែននៅលើយន្តហោះ, HDMI, ច្រក USB ចំនួន 3 (ក្នុងនោះមាន 3.0 USB 9), Ethernet, និង USB-C។ Jack barrel DC ដើម្បីផ្តល់ថាមពលដល់ក្តារ ដោយប្រើចន្លោះពី 19-1V។ ម្ជុល GPIO នៅលើក្តារប្រើប្រាស់ប្លង់មូលដ្ឋានដូចគ្នានឹងកុំព្យូទ័របន្ទះតែមួយ Raspberry Pi ដ៏ពេញនិយម ដោយចាប់ផ្តើមពីលេខ PIN #XNUMX នៅជួរខាងក្រៅដែលនៅជាប់នឹងច្រកអ៊ីសឺរណិត។ ដូចគ្នានេះដែរ ឧបករណ៍ភ្ជាប់កាមេរ៉ា CSI ពីរអាចដំណើរការមុខងារជាមួយម៉ាក Raspberry Pi និងកាមេរ៉ាដែលមានទម្រង់តូចស្រដៀងគ្នា។
កម្មវិធីដែលបានដំឡើងជាមុនរួមមាន ROS 2 Humble, Ubuntu 22.04, និង NVIDIA Jetpack ដែលអាចឱ្យសមត្ថភាពពេញលេញនៃវេទិកា Orin ។
ចំណាំ៖ ដើម្បីរក្សាភាពឆបគ្នាជាមួយឧបករណ៍បញ្ជាតួ និងសមាសធាតុមនុស្សយន្តផ្សេងទៀត យើងមិនណែនាំឲ្យបញ្ចេញ Jetson Orin ជាមួយកម្មវិធីផ្សេងទេ។ សម្រាប់ករណីប្រើប្រាស់កម្រិតខ្ពស់បន្ថែមទៀត សូមទាក់ទងផ្នែកគាំទ្ររបស់ Roboworks។
1.2 ប្រព័ន្ធចាប់សញ្ញា៖ LiDAR & Depth Camera
Pickerbot Pro ត្រូវបានបំពាក់ដោយ Leishen M10 LSLiDAR ។ ជាមួយនឹងជួរការរកឃើញអតិបរមា 30m និងប្រេកង់ស្កេនបង្វិល 12Hz និងសមាមាត្រសញ្ញា-សំឡេងរំខានខ្ពស់ ដែលលុបបំបាត់តម្រូវការសម្រាប់ការត្រងបន្ថែម។ វារួមបញ្ចូលគ្នាយ៉ាងរលូន ដោយផ្តល់នូវការគូសផែនទី និងសមត្ថភាពរុករកដ៏ល្អឥតខ្ចោះ។
លើសពីនេះ Pickerbot Pro ត្រូវបានបំពាក់ដោយកាមេរ៉ា Orbbec Astra Depth Camera ដែលជាកាមេរ៉ាជម្រៅ RGB ។ កាមេរ៉ានេះត្រូវបានធ្វើឱ្យប្រសើរសម្រាប់ការប្រើប្រាស់ជាច្រើន រួមទាំងការគ្រប់គ្រងកាយវិការ ការតាមដានគ្រោងឆ្អឹង ការស្កេន 3D ការរកឃើញវត្ថុ និងការអភិវឌ្ឍន៍ចំណុចពពកជាមួយ ROS 2 ។
| ដំណោះស្រាយជម្រៅ | ដំណោះស្រាយ RGB | មុំយល់ RGB | ជម្រៅ FPS | អត្រាស៊ុម RGB | ជម្រៅស៊ុម | ជួរជម្រៅ |
| ១២៨០ × ១០២៤ | ១២៨០ × ១០២៤ | 63.1 × 49.4 ° | 58 × 45.5 ° | 30fps | 30fps | ០.៦-៤ ម។ |
1.3 ផ្ទាំងបញ្ជា STM32 (ការគ្រប់គ្រងម៉ូទ័រ & IMU)
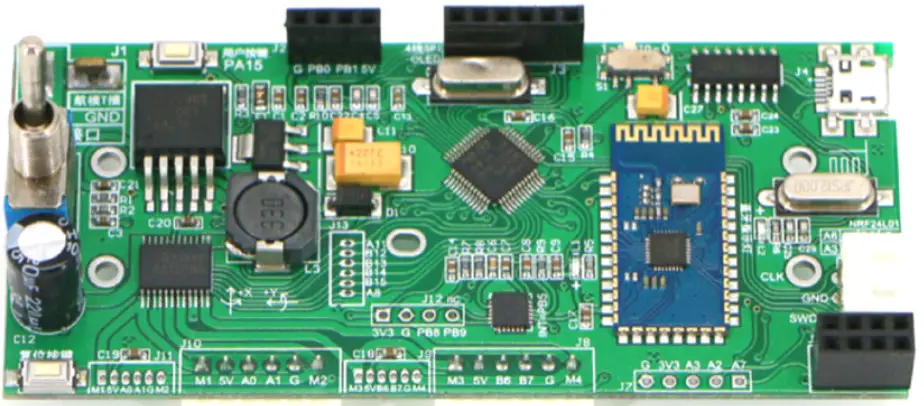
សម្រាប់តួ និងការគ្រប់គ្រងម៉ូទ័រ Pickerbot Pro មានបន្ទះត្រួតពិនិត្យ STM32 ។ បន្ទះនេះធានានូវការប្រើប្រាស់ថាមពលទាប ការគ្រប់គ្រងម៉ូទ័រច្បាស់លាស់ អេក្រង់ OLED សម្រាប់ត្រួតពិនិត្យម៉ូទ័រ និងឯកតារង្វាស់និចលភាព (IMU)។ វាអាចត្រូវបានកំណត់រចនាសម្ព័ន្ធសម្រាប់ប្រតិបត្តិការពិសេសបន្ថែមទៀត ឬដើម្បីបើកការផ្ដល់មតិត្រឡប់របស់កម្មវិធីបម្លែងកូដទៅកាន់ឧបករណ៍បញ្ជា Jetson Orin។ ការប្រើប្រាស់កញ្ចប់កម្មវិធី Keil និង FlyMCU សម្រាប់ការចងក្រង និងការលេចចេញជាបន្តបន្ទាប់នៃ STM32F103។
| STM32F103RC | លក្ខណៈពិសេស |
| ស្នូល | ARM32-bit Cortex -M3 CPU ល្បឿនអតិបរមា 72 MHz |
| អនុស្សាវរីយ៍ | 512 KB នៃអង្គចងចាំ Flash 64kB នៃ SRAM |
| នាឡិកា កំណត់ឡើងវិញ និងការគ្រប់គ្រងការផ្គត់ផ្គង់ | ការផ្គត់ផ្គង់កម្មវិធី 2.0 ទៅ 3.6 V និង I/Os |
| ថាមពល | គេង។ របៀបបញ្ឈប់ និងរង់ចាំ ការផ្គត់ផ្គង់ V សម្រាប់ RTC និងការចុះឈ្មោះបម្រុងទុក BAT |
| ឌីអេមអេ | ឧបករណ៍បញ្ជា DMA 12 ឆានែល |
| របៀបបំបាត់កំហុស | SWD និង JTAG ចំណុចប្រទាក់ Cortex-M3 Embedded Trace Macrocell |
| ច្រក I/O | ច្រក I/O ចំនួន 51 (អាចគូសនៅលើវ៉ិចទ័ររំខានខាងក្រៅ 16 និង 5V អត់ឱន) |
| កម្មវិធីកំណត់ម៉ោង | កម្មវិធីកំណត់ម៉ោង 4 × 16 ប៊ីត ឧបករណ៍កំណត់ម៉ោងគ្រប់គ្រងម៉ូទ័រ 2 x 16 ប៊ីត PWM (ជាមួយនឹងការឈប់សង្គ្រោះបន្ទាន់) ឧបករណ៍កំណត់ម៉ោងឃ្លាំមើល 2 x (ឯករាជ្យ និងបង្អួច) កម្មវិធីកំណត់ម៉ោង SysTick (កម្មវិធីកំណត់ពេលវេលា 24 ប៊ីត) កម្មវិធីកំណត់ម៉ោងមូលដ្ឋាន 2 x 16 ប៊ីត ដើម្បីជំរុញ DAC |
| ចំណុចប្រទាក់ទំនាក់ទំនង | ចំណុចប្រទាក់ល្បឿន USB 2.0 ពេញលេញ ចំណុចប្រទាក់ SDIO ចំណុចប្រទាក់ CAN (2.0B សកម្ម) |
1.4 Chassis Overview និងជម្រើសថ្ម
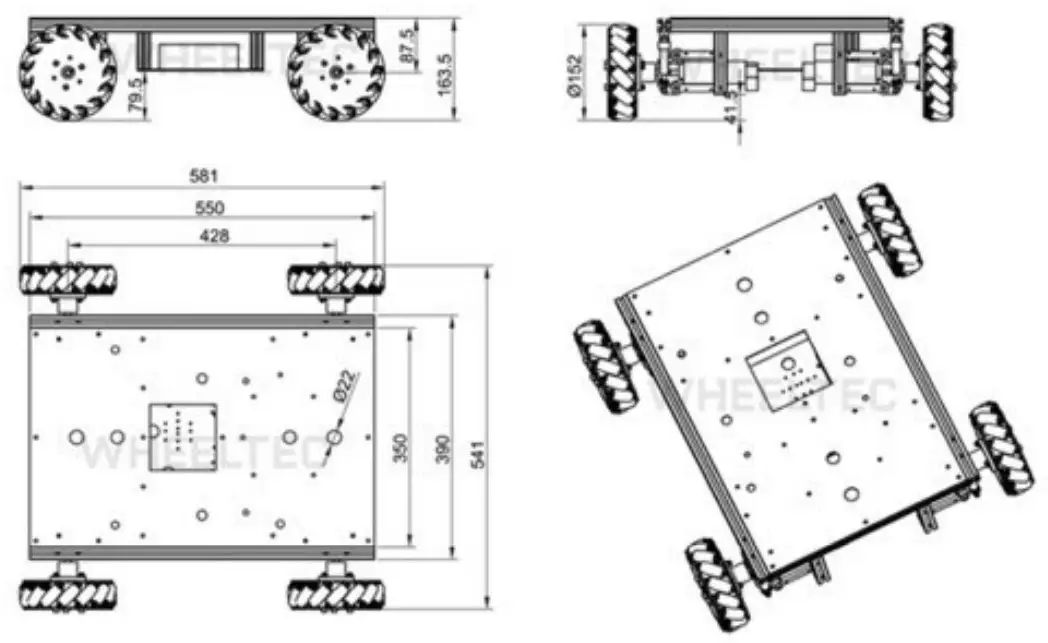
Pickerbot Pro ត្រូវបានបំពាក់ដោយកង់ Mecanum omnidirectional ដែលនីមួយៗមាន rollers offset 45-degree ដែលជួយសម្រួលចលនាគ្រប់ទិសដៅ។ វាសំខាន់ណាស់ក្នុងការកត់សម្គាល់ថាកង់ទាំងនេះត្រូវបានផ្គត់ផ្គង់ជាគូ ដោយគូនីមួយៗមាន rollers តម្រង់ទិសខុសៗគ្នា។ កំឡុងពេលដំឡើងនៅលើមនុស្សយន្ត សូមប្រាកដថាកង់ផ្ទុយអង្កត់ទ្រូងមាន rollers ចង្អុលទៅទិសដូចគ្នា។ ប្រសិនបើមនុស្សយន្តផ្លាស់ទីដោយមិននឹកស្មានដល់ នោះគ្រាន់តែបង្វិលកង់គូ។
ការពិចារណាត្រូវតែធ្វើឡើងនៅពេលបង្កើនasinសមត្ថភាពថ្ម g។ Pickerbot Pro ភ្ជាប់មកជាមួយថ្ម 5000 mAh ជាស្តង់ដារ ហើយអាចដំឡើងទៅជាជម្រើស 10,000 ឬ 20,000 mAh ដោយគិតថ្លៃបន្ថែម។ ថ្ម 20,000 mAh មានទំហំធំពេកមិនអាចដាក់ក្នុងតួរបស់ Pickerbot Pro បានទេ ហើយអាចដំឡើងបានតែនៅផ្នែកខាងលើនៃតួមនុស្សយន្តប៉ុណ្ណោះ។ សូមមើលតារាងខាងក្រោមសម្រាប់ប៉ារ៉ាម៉ែត្រទម្ងន់ និងទំហំ។
| ប៉ារ៉ាម៉ែត្រថ្ម | លក្ខណៈពិសេស | ||
| 5000 mAh | 10000 mAh | 20000 mAh | |
| វ៉ុលថ្មtage | 22.2V | 22.2V | 22.2V |
| ទំហំ | 124 * 71 * 42 មម | 124 * 71 * 71 មម | 156 * 122 * 71 មម |
| ឆ្នាំងសាកថាមពល | ដុំសាក DC 5.5 ឧបករណ៍បំលែងរាងអក្សរ T |
ដុំសាក DC 5.5 ឧបករណ៍បំលែងរាងអក្សរ T |
ដុំសាក DC 5.5 ឧបករណ៍បំលែងរាងអក្សរ T |
| ការសម្តែង | 15A បន្ត d គិតថ្លៃ |
30A ការហូរចេញជាបន្តបន្ទាប់ | 60A ការហូរចេញជាបន្តបន្ទាប់ |
| ទម្ងន់ | 0.66 គីឡូក្រាម | 1.25 គីឡូក្រាម | 2.4 គីឡូក្រាម |
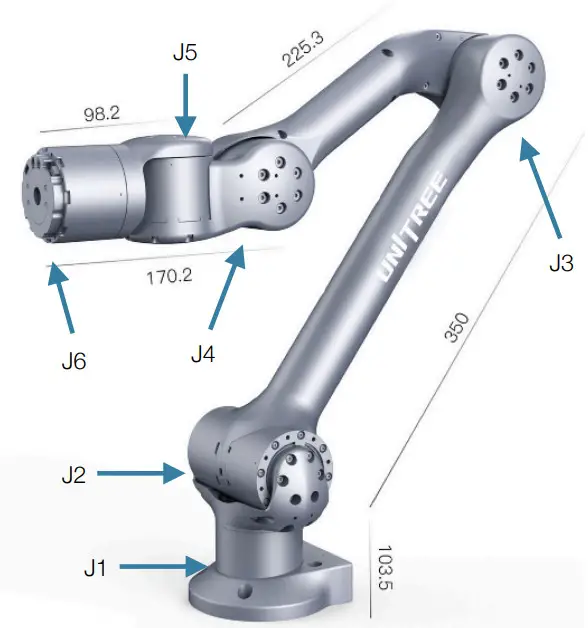
1.5 Unitree Z1 Pro Robotic Arm
Pickerbot Pro រួមបញ្ចូលដៃមនុស្សយន្ត Unitree Z1 Pro ដែលផ្តល់នូវភាពទាក់ទាញគួរឱ្យចាប់អារម្មណ៍ជាមួយនឹង 6 ដឺក្រេនៃសេរីភាព និងឈានដល់ 740mm ។ សូមយោងទៅតារាងប៉ារ៉ាម៉ែត្ររួមខាងក្រោមសម្រាប់ការប្ដូរតាមបំណង kinematics ដើម្បីបំពេញតាមតម្រូវការជាក់លាក់របស់អ្នក។
| រួម | ជួរនៃចលនា | ល្បឿនអតិបរមា | កម្លាំងបង្វិលជុំអតិបរមា |
| J1 | ± 150° | 180°/s | 33N ·m |
| J2 | 0-180° | 180°/s | 33N ·m |
| J3 | -165°—0 | 180°/s | 33N ·m |
| J4 | ± 80° | 180°/s | 33N ·m |
| J5 | ± 85° | 180°/s | 33N ·m |
| J6 | ±160 | 180°/s | 33N ·m |
| ប៉ារ៉ាម៉ែត្រ | Z1 Pro |
| ទម្ងន់ | 4.5 គីឡូក្រាម |
| បន្ទុក | 3 គីឡូក្រាម |
| ឈានដល់ | 740 ម។ |
| ភាពអាចធ្វើម្តងទៀត | ~ 0.1 ម។ |
| ការផ្គត់ផ្គង់ថាមពល | 24V |
| ចំណុចប្រទាក់ | អ៊ីសឺរណិត |
| ប្រព័ន្ធប្រតិបត្តិការដែលត្រូវគ្នា។ | អ៊ូប៊ុនទូ |
| ថាមពលអតិបរមា | 500 វ៉ |
| បង្ខំមតិកែលម្អ | បាទ |
កម្មវិធី និងការចាប់ផ្តើម
2.1 ROS 2 ការចាប់ផ្តើមរហ័ស
នៅពេលដែលមនុស្សយន្តត្រូវបានបើកដំណើរការដំបូង វាត្រូវបានគ្រប់គ្រងដោយ ROS តាមលំនាំដើម។ មានន័យថា បន្ទះឧបករណ៍បញ្ជាតួ STM32 ទទួលពាក្យបញ្ជាពីឧបករណ៍បញ្ជា ROS 2 - The Jetson Orin ។
ការដំឡើងដំបូងគឺរហ័ស និងងាយស្រួល ពីកុំព្យូទ័រម៉ាស៊ីនរបស់អ្នក (អ៊ូប៊ុនទូលីនុចដែលបានណែនាំ) ភ្ជាប់ទៅកាន់ Wi-Fi hotspot របស់មនុស្សយន្ត។ ពាក្យសម្ងាត់តាមលំនាំដើមគឺ "ដុងក្វាន់"។
បន្ទាប់មក ភ្ជាប់ទៅមនុស្សយន្តដោយប្រើ SSH តាមរយៈស្ថានីយលីនុច អាសយដ្ឋាន IP គឺ 192.168.0.100 ពាក្យសម្ងាត់លំនាំដើមគឺដុងក្វាន់។
![]()
ជាមួយនឹងការចូលប្រើស្ថានីយទៅកាន់មនុស្សយន្ត អ្នកអាចរុករកទៅកាន់ថតកន្លែងធ្វើការ ROS 2 នៅក្រោម “wheeltec_ROS 2” មុនពេលដំណើរការកម្មវិធីសាកល្បង សូមចូលទៅកាន់ wheeltec_ROS 2/turn_on_wheeltec_robot/ ហើយកំណត់ទីតាំង wheeltec_udev.sh – ស្គ្រីបនេះត្រូវតែដំណើរការជាធម្មតាតែម្តងប៉ុណ្ណោះ។ ដើម្បីធានាបាននូវការកំណត់ត្រឹមត្រូវនៃគ្រឿងកុំព្យូទ័រ។
ឥឡូវនេះ អ្នកអាចសាកល្បងមុខងាររបស់មនុស្សយន្ត ដើម្បីបើកដំណើរការមុខងារឧបករណ៍បញ្ជា ROS 2 សូមដំណើរការ៖ “roslaunch turn_on_wheeltec_robot turn_on_wheeltec_robot.launch”
![]()
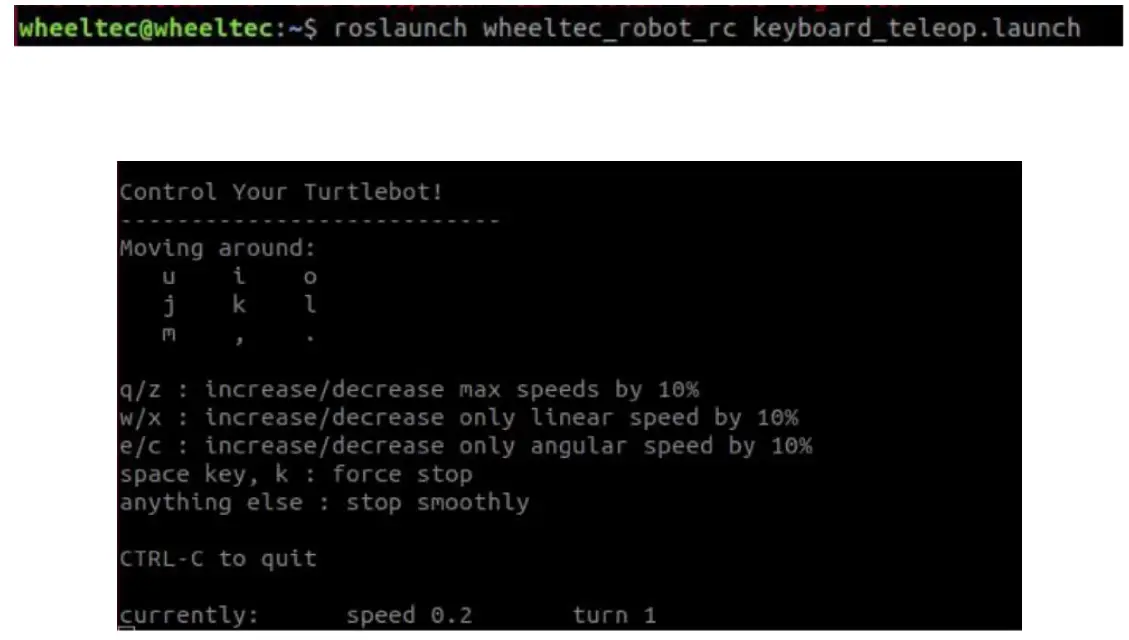
នៅក្នុងស្ថានីយទីពីរ អ្នកអាចប្រើថ្នាំង keyboard_teleop ដើម្បីធ្វើសុពលភាពការគ្រប់គ្រងតួ នេះជាកំណែដែលបានកែប្រែនៃ ROS 2 Turtlebot ex ដ៏ពេញនិយមampលេ ប្រភេទ៖ “roslaunch wheeltec_robot_rc keyboard_teleop.launch”
2.2 កញ្ចប់ ROS 2 ដែលបានដំឡើងជាមុនសម្រាប់តួ
ខាងក្រោមនេះជាកញ្ចប់ដែលផ្តោតលើអ្នកប្រើប្រាស់ ខណៈពេលដែលកញ្ចប់ផ្សេងទៀតអាចមានវត្តមាន ទាំងនេះគ្រាន់តែជាភាពអាស្រ័យប៉ុណ្ណោះ។
turn_on_wheeltec_robot
កញ្ចប់នេះគឺមានសារៈសំខាន់សម្រាប់ការបើកដំណើរការមុខងារមនុស្សយន្ត និងការទំនាក់ទំនងជាមួយឧបករណ៍បញ្ជាតួ។
ស្គ្រីបចម្បង “turn_on_wheeltec_robot.launch” ត្រូវតែប្រើនៅពេលចាប់ផ្ដើមនីមួយៗ ដើម្បីកំណត់រចនាសម្ព័ន្ធ ROS 2 និងឧបករណ៍បញ្ជា។
wheeltec_rviz2
មានឯកសារបើកដំណើរការដើម្បីបើកដំណើរការ rviz ជាមួយនឹងការកំណត់ផ្ទាល់ខ្លួនសម្រាប់ Pickerbot Pro ។
wheeltec_robot_slam
ការគូសផែនទី SLAM និងកញ្ចប់មូលដ្ឋានីយកម្មជាមួយនឹងការកំណត់ផ្ទាល់ខ្លួនសម្រាប់ Pickerbot Pro ។
wheeltec_robot_rrt2
ការរុករកយ៉ាងរហ័សនូវក្បួនដោះស្រាយដើមឈើចៃដន្យ – កញ្ចប់នេះអនុញ្ញាតឱ្យ Pickerbot Pro រៀបចំផែនការផ្លូវទៅកាន់ទីតាំងដែលចង់បាន ដោយបើកដំណើរការថ្នាំងរុករក។
wheeltec_robot_keyboard
កញ្ចប់ងាយស្រួលសម្រាប់ផ្ទៀងផ្ទាត់មុខងារមនុស្សយន្ត និងការគ្រប់គ្រងដោយប្រើក្តារចុច រួមទាំងពីកុំព្យូទ័រម៉ាស៊ីនពីចម្ងាយ។
wheeltec_robot_nav2
កញ្ចប់ថ្នាំង ROS 2 Navigation 2 ។
wheeltec_lidar_ROS ២
កញ្ចប់ ROS 2 Lidar សម្រាប់កំណត់រចនាសម្ព័ន្ធ Leishen M10/N10 ។
wheeltec_joy
កញ្ចប់គ្រប់គ្រងយ៉យស្ទីក មានឯកសារបើកដំណើរការសម្រាប់ថ្នាំងយ៉យស្ទីក។
simple_follower_ROS ២
វត្ថុ និងបន្ទាត់មូលដ្ឋានតាមក្បួនដោះស្រាយដោយប្រើទាំងការស្កែនឡាស៊ែរ ឬកាមេរ៉ាជម្រៅ។
ROS 2_astra_camera
កញ្ចប់កាមេរ៉ាជម្រៅ Astra ជាមួយកម្មវិធីបញ្ជា និងបើកដំណើរការឯកសារ។
ការរួមបញ្ចូលដៃមនុស្សយន្ត
3.1 សមាសធាតុខ្សែដៃមនុស្សយន្ត
Unitree Z1 ខ្សែភ្លើងដែលបានណែនាំ
ខាងក្រោមនេះគឺជាធាតុផ្សំខ្សែភ្លើងដែលបានណែនាំសម្រាប់ដៃ Unitree Z1។ វាគួរតែមានឧបករណ៍ភ្ជាប់ 2-pole dean ភេទស្រីដែលអាចប្រើបាននៅលើការដាច់បន្ទាប់ពីកុងតាក់ថាមពល។ ភ្ជាប់សមាសធាតុជាស៊េរី។ ត្រូវប្រាកដថាការភ្ជាប់ឧបករណ៍ភ្ជាប់ +/GND ត្រូវគ្នា។ អ្នកកាន់ផ្លុំហ្វុយស៊ីបគួរតែអង្គុយលើខ្សែថាមពលវិជ្ជមាន។
| សមាសភាគ | បរិមាណ |
| ឧបករណ៍ភ្ជាប់បង្គោល 2 រចនាប័ទ្មបុរសបុរស | x1 |
| ឧបករណ៍ភ្ជាប់បង្គោល 60 រចនាប័ទ្មបុរស xt2 | x1 |
| អ្នកកាន់ fuse blade ខាងក្នុង | x1 |
| ខ្សែ 14 AWG 2 ស្នូល | x1 |
| 7.5 Blade fuse | x1 |
ដោយសារដៃមានតែឧបករណ៍បំប្លែងដែលទាក់ទង វាត្រូវតែត្រូវបានកំណត់ឡើងវិញទៅទីតាំងដដែលនៅរាល់ការចាប់ផ្ដើម។ អ្នកអាចឃើញថាវាមានប្រយោជន៍ក្នុងការភ្ជាប់កុងតាក់ជាស៊េរីនៅក្នុងខ្សែ ដើម្បីងាយស្រួលបើក និងបិទដៃសម្រាប់ការកំណត់ឡើងវិញ។
ចំណាំ៖ ឯកសារ Unitree និយាយថាដៃត្រូវបានវាយតម្លៃសម្រាប់ 20A ។ នេះមិនត្រឹមត្រូវ។ ហ្វុយហ្ស៊ីប 10A SMD ត្រូវបានភ្ជាប់ជាស៊េរីសម្រាប់ការផ្គត់ផ្គង់ថាមពលនីមួយៗ។ ការប្រើប្រាស់ហ្វុយហ្ស៊ីប 7.5A នឹងផ្លុំមុនពេលហ្វុយហ្ស៊ីប 10A SMD ហើយនឹងងាយស្រួលជំនួសយ៉ាងខ្លាំង។
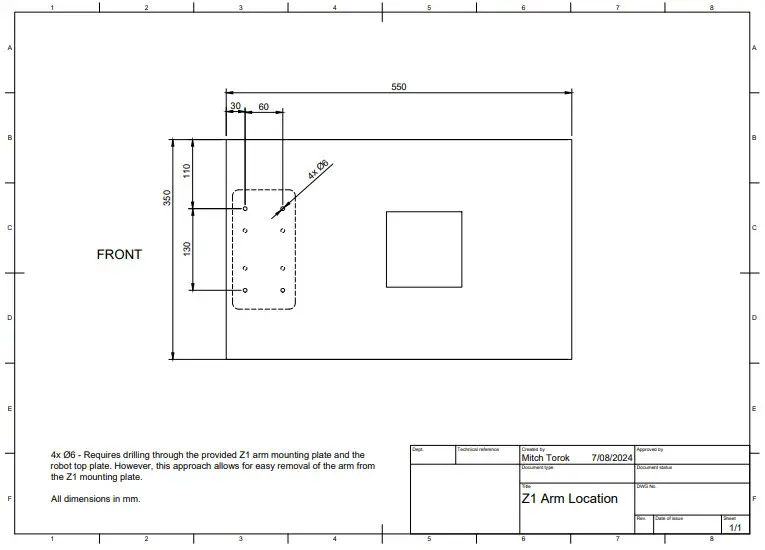
ចំណាំ៖ ដោយសារតែទម្ងន់បន្ថែមនៃដៃ Unitree Z1 នៅលើប្រព័ន្ធ រន្ធខាងមុខមិនអាចទ្រទ្រង់ដៃបានទេ។ ស្ទ្រីមបង្ហាប់ 70mm * 16mm អាចត្រូវបានរកឃើញ និងប្រើជំនួសកន្លែងស្តុក។ ម៉្យាងទៀត រន្ធទឹកធំៗដែលហ៊ុមព័ទ្ធការឆក់ អាចត្រូវបានប្រើ។
3.2 គំនូរដំឡើងដៃមនុស្សយន្ត
០៣ សample កូដសម្រាប់ដៃមនុស្សយន្ត
នៅពេលនៃសៀវភៅណែនាំអ្នកប្រើប្រាស់នេះត្រូវបានរៀបចំ SDK របស់ Unitree សម្រាប់ Z1 Pro គាំទ្រតែ ROS 1 Melodic ឬ Noetic ប៉ុណ្ណោះ។
ក្រុមផលិតផល Pickerbot Pro បានបង្កើត sample កូដនៅក្នុង ROS 2 Humble ត្រូវគ្នាជាមួយតួ។
សample កូដដើម្បីរួមបញ្ចូលដៃមនុស្សយន្ត Z1 Pro ជាមួយនឹងតួអាចត្រូវបានរកឃើញពីឃ្លាំង GitHub ខាងក្រោម៖
https://github.com/roboworksdev/pickerbotproarm
www.roboworks.net
រក្សាសិទ្ធិ © 2024 Roboworks ។ រក្សារសិទ្ធគ្រប់យ៉ាង។
ឯកសារ/ធនធាន
 |
ROBOWORKS Pickerbot Pro ជ្រើសរើស និងទម្លាក់មនុស្សយន្តចល័ត [pdf] សៀវភៅណែនាំអ្នកប្រើប្រាស់ Pickerbot Pro, Pickerbot Pro Pick and Drop Mobile Robot, Pick and Drop Mobile Robot, Drop Mobile Robot, Mobile Robot, Robot |