ROBOWORKS N10 Robot Educational Programable មនុស្សយន្តចល័ត

លក្ខណៈបច្ចេកទេស
| ឈ្មោះផលិតផល | សមាមាត្រកាត់បន្ថយម៉ូទ័រ | ល្បឿនអតិបរមា | ទម្ងន់ | បន្ទុកអតិបរមា | ទំហំ | កាំបង្វិលអប្បបរមា |
|---|---|---|---|---|---|---|
| មនុស្សយន្ត ២ | ១៦:៩ | 1.3m/s | 5.92 គីឡូក្រាម | 16 គីឡូក្រាម | 445 * 360 * 206 មម | 0.77 ម។ |
| Rosbot Pro | ១៦:៩ | 1.65m/s | 19.54 គីឡូក្រាម | 35 គីឡូក្រាម | 774 * 570 * 227 មម | 1.02 ម។ |
| Rosbot បូក | ១៦:៩ | 2.33m/s | 35.16 គីឡូក្រាម | 22 គីឡូក្រាម | 766 * 671 * 319 មម | 1.29 ម។ |
អាយុកាលថ្ម និងការផ្គត់ផ្គង់ថាមពល៖
- មនុស្សយន្តទី 2៖ ប្រហែល 9.5 ម៉ោង (មិនផ្ទុក) ប្រហែល 8.5 ម៉ោង (ផ្ទុកពេញ)
- Robot Pro: ប្រហែល 4.5 ម៉ោង (មិនផ្ទុក) ប្រហែល 3 ម៉ោង (ផ្ទុកពេញ)
- ការផ្គត់ផ្គង់ថាមពល៖ ថ្ម 24v 6000 mAh + ឆ្នាំងសាកឆ្លាតវៃបច្ចុប្បន្ន 3A
ប្រព័ន្ធចង្កូត និងបើកបរ៖
សមាសធាតុសំខាន់ៗរួមមានៈ
- ឧបករណ៍ចង្កូត៖ S20F 20kg torque servo ឌីជីថល
- កង់៖ WH060 60kg torque digital servo, 125mm អង្កត់ផ្ចិតកង់កៅស៊ូរឹងសម្រាប់ Rosbot 2, កង់កៅស៊ូរឹង 150mm សម្រាប់ Robot Pro និង
- អ៊ិនកូដឌ័រ៖ 500 បន្ទាត់ AB ដំណាក់កាល AB ឧបករណ៍បំលែងកូដភាពជាក់លាក់ខ្ពស់។
- ប្រព័ន្ធផ្អាក៖ ប្រព័ន្ធព្យួរប៉ោល Coaxial សម្រាប់មនុស្សយន្ត 2 ប្រព័ន្ធព្យួរឯករាជ្យ 4W សម្រាប់មនុស្សយន្ត Pro និង
- ចំណុចប្រទាក់គ្រប់គ្រង៖ កម្មវិធី iOS និង Android តាមរយៈ Bluetooth ឬ Wifi, PS2, CAN, Serial Port, USB
ការណែនាំអំពីឧបករណ៍បញ្ជា ROS៖
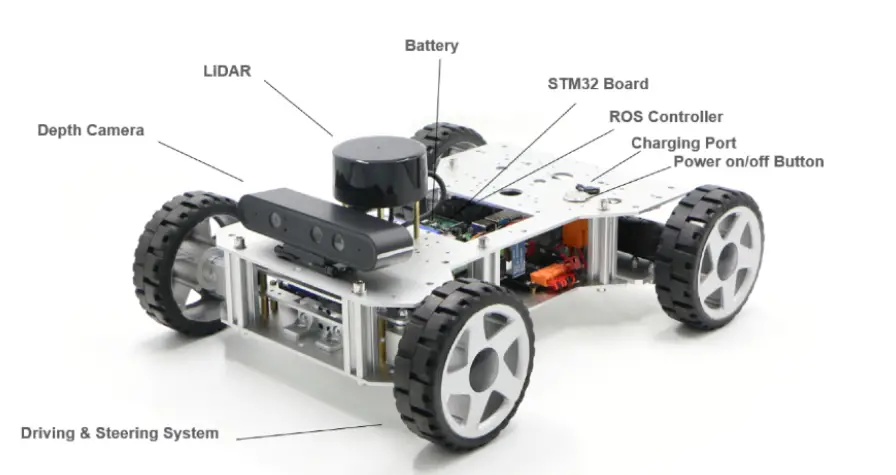
RRobotsare ទាំងអស់បំពាក់ដោយកាមេរ៉ា Orbbec Astra Depth Camera សម្រាប់ការប្រើប្រាស់ផ្សេងៗ រួមទាំងការគ្រប់គ្រងកាយវិការ ការតាមដានគ្រោងឆ្អឹង និងការស្កែន 3D។
បន្ទះ STM32៖
បន្ទះនេះមានស្នូល STM32F103RC ជាមួយនឹងមុខងារជាច្រើនរួមមាន Memories, Clock, Reset and SupplyManagement, Power DMA, Debug Mode, I/O ports, Timers និង Communication Interface។
សំណួរដែលសួរញឹកញាប់
Q: តើខ្ញុំសាកថ្មដោយរបៀបណា?
A: ប្រើឆ្នាំងសាកឆ្លាតវៃបច្ចុប្បន្ន 3A ដែលមានថាមពលថ្ម 24v 6000mAh ដើម្បីសាក RRobot
សំណួរ៖ តើអាយុកាលថ្មរបស់ Rosbot Pro គឺជាអ្វី?
A: Robot Pro មានថាមពលថ្មប្រហែល 4.5 ម៉ោងដោយមិនមានបន្ទុក និងប្រហែល 3 ម៉ោងក្រោមលក្ខខណ្ឌផ្ទុកពេញ។
សំណួរ៖ តើខ្ញុំអាចគ្រប់គ្រង Rosbot ដោយប្រើស្មាតហ្វូនបានទេ?
ចម្លើយ៖ បាទ អ្នកអាចគ្រប់គ្រង Rosbot ដោយប្រើកម្មវិធី iOS និង Android តាមរយៈ Bluetooth ឬ Wifi ។
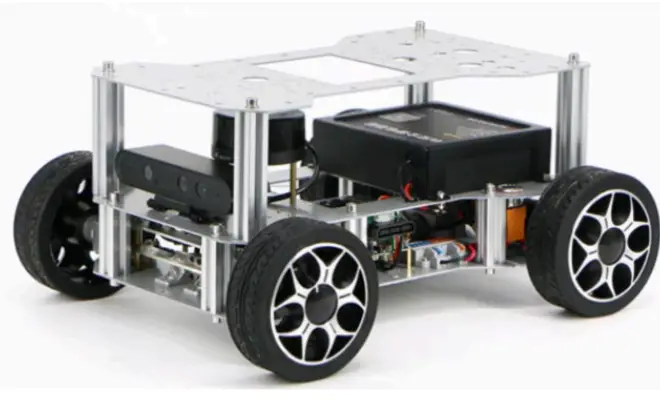
សមាសធាតុសំខាន់
| Varia% បើក | រូបភាព |
| មនុស្សយន្ត ២ | 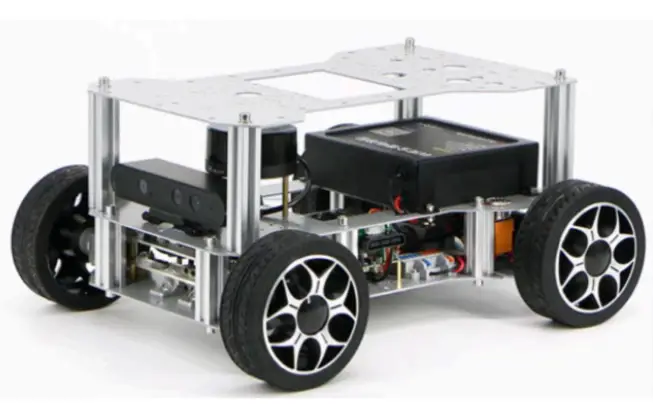 |
| មនុស្សយន្ត Pro |  |
| មនុស្សយន្តបូក |  |
លក្ខណៈបច្ចេកទេសផលិតផល
|
ម៉ាទ្រីសផលិតផល |
 |
 |
 |
| ឈ្មោះផលិតផល | មនុស្សយន្ត ២ | មនុស្សយន្ត Pro | មនុស្សយន្តបូក |
| សមាមាត្រកាត់បន្ថយម៉ូទ័រ | ១៦:៩ | ១៦:៩ | ១៦:៩ |
| ល្បឿនអតិបរមា | 1.3m/s | 1.65m/s | 2.33m/s |
| ទម្ងន់ | 5.92 គីឡូក្រាម | 19.54 គីឡូក្រាម | 35.16 គីឡូក្រាម |
| បន្ទុកអតិបរមា | 16 គីឡូក្រាម | 35 គីឡូក្រាម | 22 គីឡូក្រាម |
| ទំហំ | 445 * 360 * 206 មម | 774 * 570 * 227 មម | 766 * 671 * 319 មម |
| កាំបង្វិលអប្បបរមា | 0.77 ម។ | 1.02 ម។ | 1.29 ម។ |
| អាយុកាលថ្ម | ប្រហែល 9.5 ម៉ោង (មិនផ្ទុក) ប្រហែល 8.5 ម៉ោង (ផ្ទុកពេញ) | ប្រហែល 4.5 ម៉ោង (មិនផ្ទុក) ប្រហែល 3 ម៉ោង (ផ្ទុកពេញ) | |
| ការផ្គត់ផ្គង់ថាមពល | ថ្ម 24v 6000 mAh + ឆ្នាំងសាកឆ្លាតវៃបច្ចុប្បន្ន 3A | ||
| ឧបករណ៍ចង្កូត | S20F 20kg torque servo ឌីជីថល | WH060 60kg torque servo ឌីជីថល | |
| កង់ | កង់កៅស៊ូរឹង អង្កត់ផ្ចិត 125mm | កង់កៅស៊ូរឹង អង្កត់ផ្ចិត 150mm | កង់កៅស៊ូអតិផរណា 254 ម។ |
| ឧបករណ៍បំលែងកូដ | 500 បន្ទាត់ AB ដំណាក់កាលអ៊ីនកូដភាពជាក់លាក់ខ្ពស់។ | ||
| ប្រព័ន្ធផ្អាក | ប្រព័ន្ធព្យួរ Coaxial Pendulum | ប្រព័ន្ធផ្អាក 4W ឯករាជ្យ | |
| ចំណុចប្រទាក់គ្រប់គ្រង | កម្មវិធី iOS និង Android តាមរយៈ Bluetooth ឬ Wifi, PS2, CAN, Serial Port, USB | ||
ការណែនាំអំពីឧបករណ៍បញ្ជា ROS
មានឧបករណ៍បញ្ជា ROS 2 ប្រភេទដែលអាចប្រើបានជាមួយ RRobot ផ្អែកលើវេទិកា Vidia Jetson ។ Jetson Orin Nano គឺស័ក្តិសមបន្ថែមទៀតចំពោះការស្រាវជ្រាវ និងការអប់រំ។ Jetson Orin NX គឺល្អសម្រាប់ការបង្កើតគំរូផលិតផល និងកម្មវិធីពាណិជ្ជកម្ម។ តារាងខាងក្រោមបង្ហាញពីភាពខុសគ្នាផ្នែកបច្ចេកទេសសំខាន់ៗរវាងឧបករណ៍បញ្ជាផ្សេងៗដែលមានពី Roboworks ។ ក្តារទាំងពីរនេះអនុញ្ញាតឱ្យមានការគណនាកម្រិតខ្ពស់ និងស័ក្តិសមជាមួយកម្មវិធីមនុស្សយន្តកម្រិតខ្ពស់ដូចជា ចក្ខុវិស័យកុំព្យូទ័រ ការរៀនស៊ីជម្រៅ និងការធ្វើផែនការចលនា។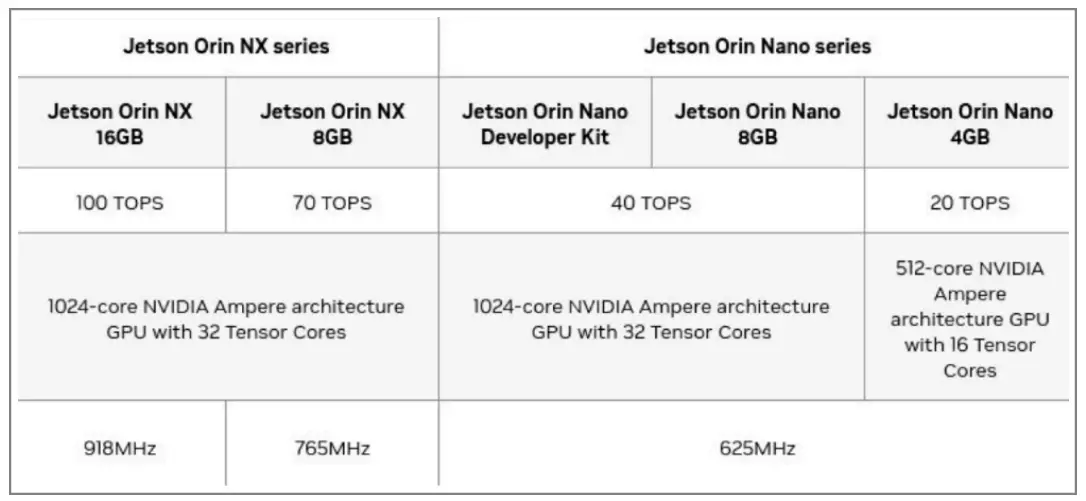
ប្រព័ន្ធចាប់សញ្ញា៖ LiDAR & Depth Camera
Leishen LSLiDAR ត្រូវបានដំឡើងនៅលើបំរែបំរួល Rosbot ទាំងអស់ជាមួយនឹងម៉ូដែល N10 ឬ M10 ដែលត្រូវបានប្រើ។ LLiDAR ទាំងនេះផ្តល់ជូននូវការស្កេន 3360-3360 ដឺក្រេ និងការយល់ឃើញជុំវិញ និងមាន ESI តូច និងស្រាល។ ពួកវាមានអនុបាតសញ្ញារំខានខ្ពស់ និងដំណើរការរាវរកដ៏ល្អឥតខ្ចោះលើវត្ថុដែលឆ្លុះបញ្ចាំងខ្ពស់/ទាប និងដំណើរការបានល្អក្នុងស្ថានភាពពន្លឺខ្លាំង។ ពួកគេមានជួររាវរក 30 ម៉ែត្រ និងប្រេកង់ស្កេន 12Hz ។ LiDAR នេះរួមបញ្ចូលយ៉ាងរលូនទៅក្នុង Robots ដោយធានាថាការប្រើប្រាស់ផែនទី និងការរុករកទាំងអស់អាចសម្រេចបានយ៉ាងងាយស្រួលនៅក្នុងគម្រោងរបស់អ្នក។ តារាងខាងក្រោមសង្ខេបអំពីលក្ខណៈបច្ចេកទេសនៃគ្រាប់រំកិល៖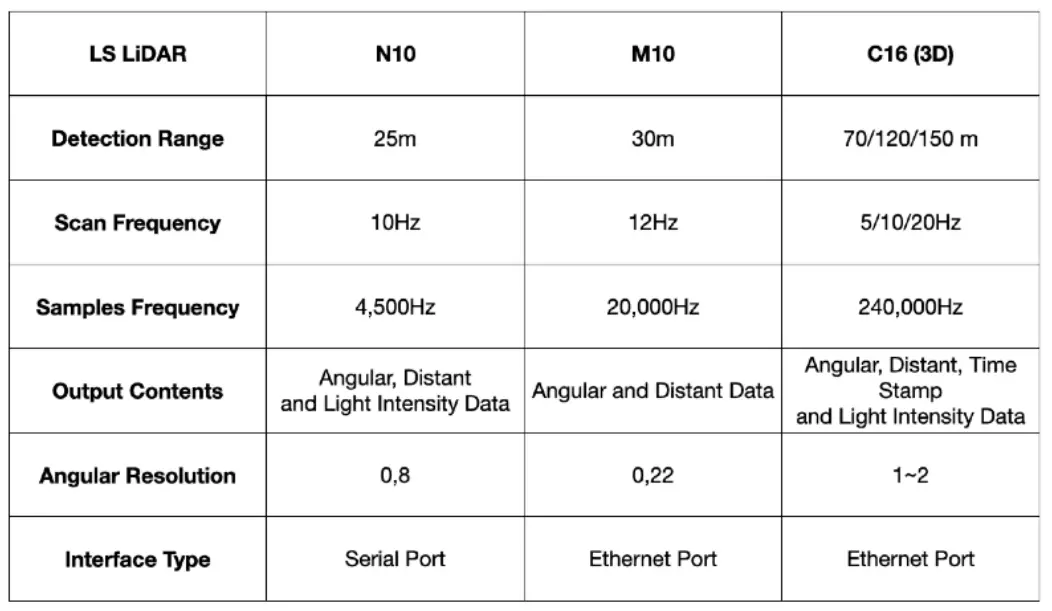
លើសពីនេះ Robots ទាំងអស់ត្រូវបានបំពាក់ដោយ Orbbec Astra Depth Camera ដែលជាកាមេរ៉ា RGBD។ កាមេរ៉ានេះត្រូវបានធ្វើឱ្យប្រសើរសម្រាប់ការប្រើប្រាស់ជាច្រើន រួមទាំងការគ្រប់គ្រងកាយវិការ ការតាមដានគ្រោងឆ្អឹង ការស្កេន 3D និងការអភិវឌ្ឍន៍ពពកចំណុច។ តារាងខាងក្រោមសង្ខេបអំពីលក្ខណៈបច្ចេកទេសនៃកាមេរ៉ាជម្រៅ។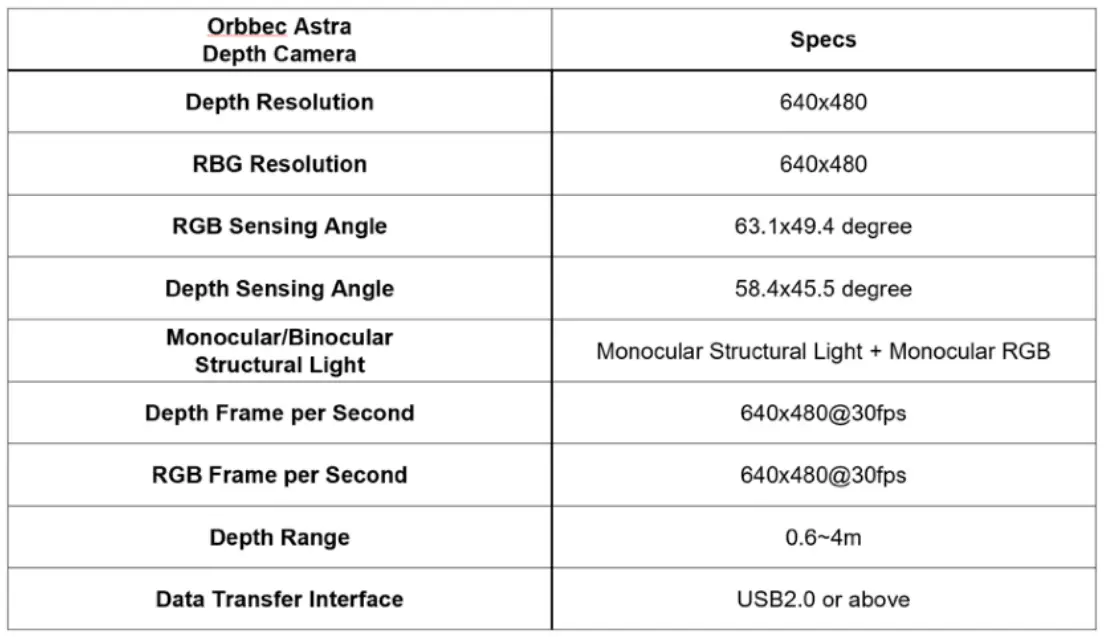
បន្ទះ STM32 (ការគ្រប់គ្រងម៉ូទ័រ ការគ្រប់គ្រងថាមពល និង IMU)
បន្ទះ STM32F103RC គឺជា microcontroller ដែលប្រើនៅក្នុង Rosbots ទាំងអស់។ វាមានដំណើរការខ្ពស់ ARM Cortex-M3 32-bit RISC core ដំណើរការនៅប្រេកង់ 72MHz រួមជាមួយនឹងអង្គចងចាំបង្កប់ដែលមានល្បឿនលឿន។ វាដំណើរការក្នុងជួរសីតុណ្ហភាព -40°C ដល់ +105°C ដែលសាកសមនឹងកម្មវិធីមនុស្សយន្តទាំងអស់នៅក្នុងអាកាសធាតុទូទាំងពិភពលោក។ មានរបៀបសន្សំថាមពលដែលអនុញ្ញាតឱ្យរចនាកម្មវិធីថាមពលទាប។ កម្មវិធីមួយចំនួននៃ microcontroller នេះរួមមាន motor drives, application control, robotic apps and handheld applications, PC and gaming peripherals, GPS platforms, industrial applications, alarm system video intercoms, and scanners។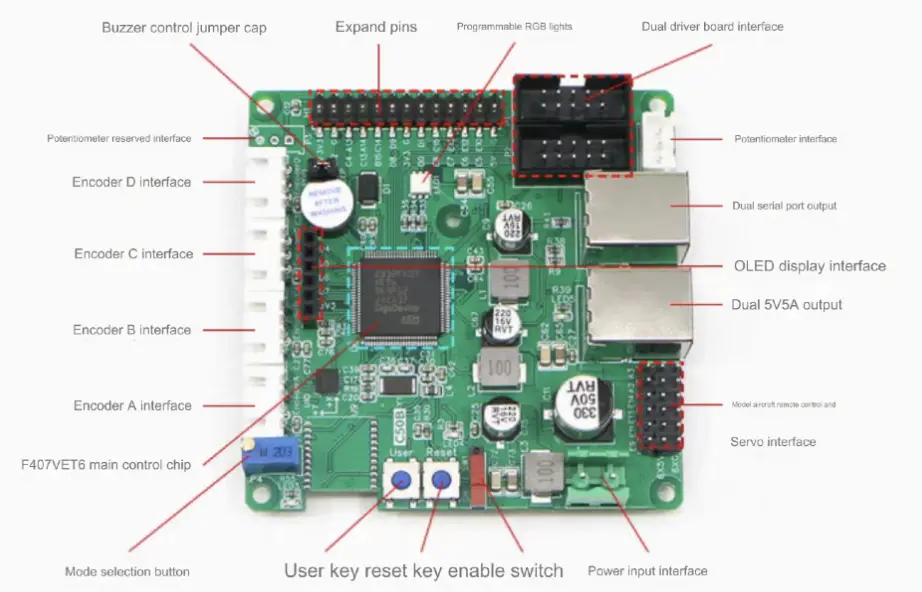
| STM32F103RC | លក្ខណៈពិសេស |
| ស្នូល | ARM32-bit Cortex –M3 CPU ល្បឿនអតិបរមា 72 MHz |
| អនុស្សាវរីយ៍ | 512 KB នៃអង្គចងចាំ Flash 64kB នៃ SRAM |
| នាឡិកា កំណត់ឡើងវិញ និងការគ្រប់គ្រងការផ្គត់ផ្គង់ | ការផ្គត់ផ្គង់កម្មវិធី 2.0 ទៅ 3.6 V និង I/Os |
|
ថាមពល |
របៀបគេង បញ្ឈប់ និងរង់ចាំ
ការផ្គត់ផ្គង់ V សម្រាប់ RTC និងការចុះឈ្មោះបម្រុងទុក BAT |
| ឌីអេមអេ | ឧបករណ៍បញ្ជា DMA 12 ឆានែល |
| របៀបបំបាត់កំហុស | SWD និង JTAG ចំណុចប្រទាក់ Cortex-M3 Embedded Trace Macrocell |
| ច្រក I/O | ច្រក I/O ចំនួន 51 (អាចគូសនៅលើវ៉ិចទ័ររំខានខាងក្រៅ 16 និង 5V អត់ឱន) |
|
កម្មវិធីកំណត់ម៉ោង |
កម្មវិធីកំណត់ម៉ោង 4 × 16 ប៊ីត
ឧបករណ៍កំណត់ម៉ោងគ្រប់គ្រងម៉ូទ័រ 2 x 16 ប៊ីត PWM (ជាមួយនឹងការឈប់សង្គ្រោះបន្ទាន់) កម្មវិធីកំណត់ម៉ោងឃ្លាំមើល 2 x (ឯករាជ្យ និងបង្អួច) កម្មវិធីកំណត់ម៉ោង SysTick (បញ្ជរចុះក្រោម 24 ប៊ីត) កម្មវិធីកំណត់ម៉ោងមូលដ្ឋាន 2 x 16 ប៊ីត ដើម្បីជំរុញ DAC |
|
ចំណុចប្រទាក់ទំនាក់ទំនង |
ចំណុចប្រទាក់ USB 2.0 ល្បឿនពេញ SDIO
ចំណុចប្រទាក់ CAN (2.0B សកម្ម) |
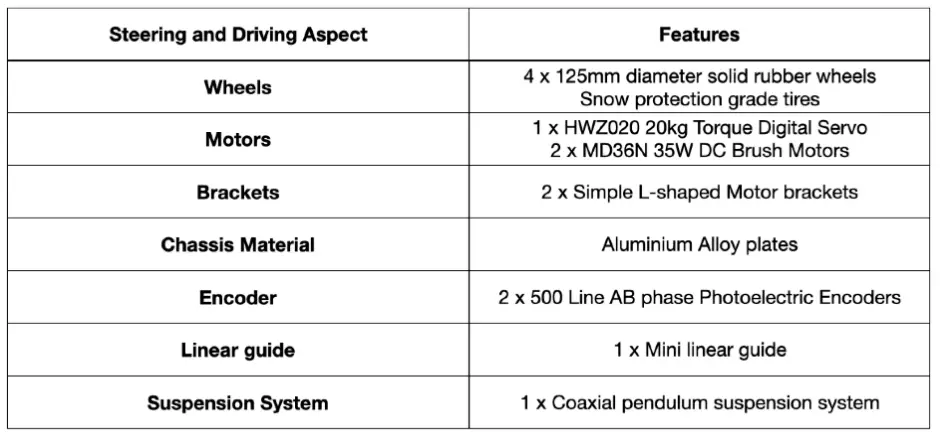
ប្រព័ន្ធចង្កូត និងបើកបរ
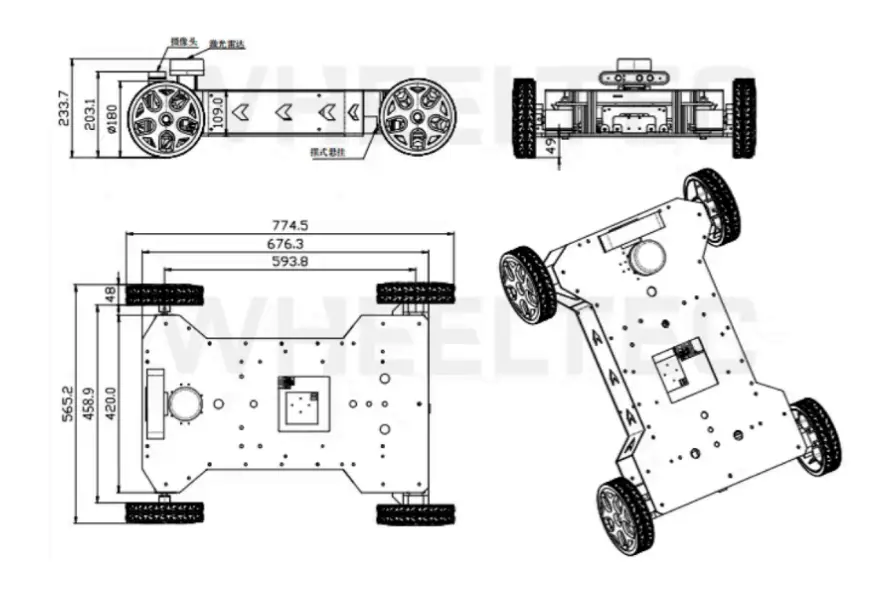
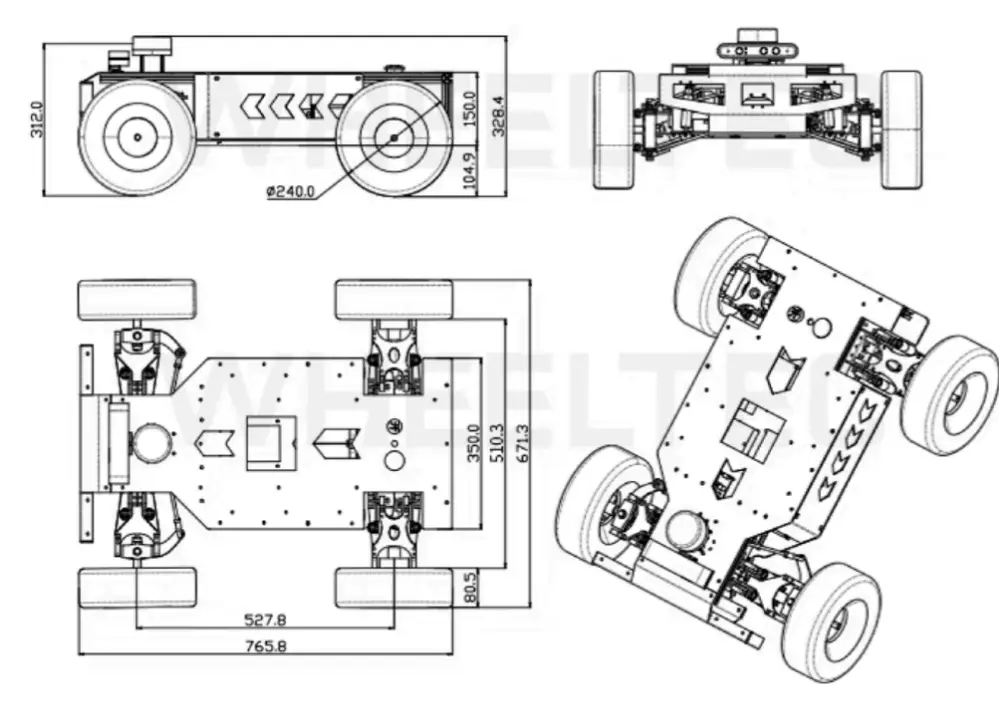
ប្រព័ន្ធ Steering and Driving system ត្រូវបានរួមបញ្ចូលជាមួយនឹងការរចនា និងបង្កើតរបស់ Robot។ អាស្រ័យលើម៉ូដែលដែលបានទិញ វានឹងក្លាយជាដ្រាយកង់ 2 ឬកង់ 4 ជាមួយនឹងជម្រើសទាំងពីរគឺសមរម្យសម្រាប់គោលបំណងស្រាវជ្រាវ និងអភិវឌ្ឍន៍ផ្សេងៗគ្នា។ កង់នៅលើ Robots ទាំងអស់សុទ្ធតែជាកៅស៊ូរឹង ជាមួយនឹងសំបកកង់ការពារព្រិល។ មានប្រព័ន្ធព្យួរ pendulum coaxial ហើយជួរមនុស្សយន្តត្រូវបានបំពាក់ដោយឧបករណ៍ស្រូបទាញជាមួយនឹងប្រព័ន្ធព្យួរឯករាជ្យ ដែលធានាថាពួកគេអាចរុករកដោយជោគជ័យនូវដីលំបាក។
លក្ខណៈបច្ចេកទេសនៃការគ្រប់គ្រង និងការបើកបរ៖
ដ្យាក្រាមរចនាតួមនុស្សយន្ត៖
មនុស្សយន្ត ២

មនុស្សយន្ត Pro
មនុស្សយន្តបូក
ការគ្រប់គ្រងថាមពល
Power Mag - ថ្ម LFP ម៉ាញ៉េទិច៖
Rosbots ទាំងអស់មានថាមពល 6000 mAh Power Mag, ថ្មម៉ាញេទិក LFP (Lithium Iron Phosphate) និងឆ្នាំងសាកថាមពល។ អតិថិជនអាចដំឡើងថ្មដល់ 20000 mAh ដោយគិតថ្លៃបន្ថែម។ ថ្ម LFP គឺជាប្រភេទថ្មលីចូម-អ៊ីយ៉ុង ដែលគេស្គាល់សម្រាប់ស្ថេរភាព សុវត្ថិភាព និងអាយុកាលវែង។ មិនដូចថ្មលីចូម-អ៊ីយ៉ុងប្រពៃណីដែលប្រើ cobalt ឬនីកែលនោះទេ ថ្ម LFP ពឹងផ្អែកលើផូស្វ័រដែក ដែលផ្តល់នូវជម្រើសប្រកបដោយនិរន្តរភាព និងជាតិពុលតិច។ ពួកវាមានភាពធន់នឹងកំដៅខ្ពស់ កាត់បន្ថយហានិភ័យនៃការឡើងកំដៅ និងភ្លើង។ ខណៈពេលដែលពួកគេមានដង់ស៊ីតេថាមពលទាបជាងបើប្រៀបធៀបទៅនឹងថ្មលីចូម-អ៊ីយ៉ុងផ្សេងទៀត ថ្ម LFP មានភាពធន់ អាយុកាលប្រើប្រាស់បានយូរ ការសាកថ្មលឿន និងដំណើរការប្រសើរជាងមុនក្នុងសីតុណ្ហភាពខ្លាំង ដែលធ្វើឱ្យវាល្អសម្រាប់រថយន្តអគ្គិសនី (EVs) និងប្រព័ន្ធផ្ទុកថាមពល។ Power Mag អាចត្រូវបានភ្ជាប់ទៅនឹងផ្ទៃលោហៈណាមួយនៃមនុស្សយន្ត ដោយសារតែការរចនាមូលដ្ឋានម៉ាញ៉េទិចរបស់វា។ វាធ្វើឱ្យការផ្លាស់ប្តូរថ្មលឿន និងងាយស្រួល។
លក្ខណៈបច្ចេកទេស៖
| គំរូ | 6000 mAh | 20000 mAh |
| កញ្ចប់ថ្ម |
22.4V 6000mAh |
22.4V 20000mAh |
|
សម្ភារៈស្នូល |
ផូលីតដែកលីចូម |
ផូលីតដែកលីចូម |
| វ៉ុលtage | ១២ វ | ១២ វ |
|
Full Voltage |
១២ វ |
១២ វ |
| ចរន្តសាក | 3A | 3A |
| សម្ភារៈសែល |
លោហៈ |
លោហៈ |
| ការសម្តែងការបង្ហូរចេញ | 15A ការហូរចេញជាបន្តបន្ទាប់ | 20A ការហូរចេញជាបន្តបន្ទាប់ |
|
ដោត |
ឧបករណ៍ភ្ជាប់ស្រី DC4017MM (សាក) ឧបករណ៍ភ្ជាប់ស្រី XT60U-F (បញ្ចេញ) |
ឧបករណ៍ភ្ជាប់ស្រី DC4017MM (សាក) ឧបករណ៍ភ្ជាប់ស្រី XT60U-F (បញ្ចេញ) |
|
ទំហំ |
177 * 146 * 42 មម |
208 * 154 * 97 មម |
|
ទម្ងន់ |
1.72 គីឡូក្រាម |
4.1 គីឡូក្រាម |
ការការពារថ្ម
សៀគ្វីខ្លី ចរន្តលើស បន្ទុកលើស ការការពារការហូរលើស គាំទ្រការសាកថ្មពេលកំពុងប្រើប្រាស់ សន្ទះសុវត្ថិភាពដែលភ្ជាប់មកជាមួយ បន្ទះការពារអណ្តាតភ្លើង។
ស្ថានីយ៍សាកដោយស្វ័យប្រវត្តិ (Power+)៖
ស្ថានីយ៍បញ្ចូលថ្មដោយស្វ័យប្រវត្តិត្រូវបានរួមបញ្ចូលជាមួយម៉ូដែល Rosbot 2+ ហើយអាចត្រូវបានទិញដាច់ដោយឡែកដើម្បីធ្វើការជាមួយ Rosbot 2, Rosbot Pro និង Rosbot Plus ។
ROS 2 ការចាប់ផ្តើមរហ័ស
នៅពេលដែលមនុស្សយន្តត្រូវបានបើកដំណើរការដំបូង វាត្រូវបានគ្រប់គ្រងដោយ ROS តាមលំនាំដើម។ មានន័យថា បន្ទះឧបករណ៍បញ្ជាតួ STM32 ទទួលពាក្យបញ្ជាពីឧបករណ៍បញ្ជា ROS 2 - The Jetson Orin ។ ការដំឡើងដំបូងគឺរហ័ស និងងាយស្រួល ពីកុំព្យូទ័រម៉ាស៊ីនរបស់អ្នក (អ៊ូប៊ុនទូលីនុចដែលបានណែនាំ) ភ្ជាប់ទៅកាន់ Wi-Fi hotspot របស់មនុស្សយន្ត។ ពាក្យសម្ងាត់តាមលំនាំដើមគឺ "Dongguan"។ បន្ទាប់មក ភ្ជាប់ទៅមនុស្សយន្តដោយប្រើ SSH តាមរយៈ Linuxterminatee l អាសយដ្ឋាន P គឺ 192.168.0.10 និង 0 ហើយពាក្យសម្ងាត់លំនាំដើមគឺ Dongguan ។
ជាមួយនឹងការចូលប្រើស្ថានីយទៅកាន់មនុស្សយន្ត អ្នកអាចរុករកទៅកាន់ថតកន្លែងធ្វើការ ROS 2 នៅក្រោម “wheeltec_ROS 2” មុនពេលដំណើរការកម្មវិធីសាកល្បង សូមចូលទៅកាន់ wheeltec_ROS 2/turn_on_wheeltec_robot/ ហើយកំណត់ទីតាំង wheeltec_udev.sh – ស្គ្រីបនេះត្រូវតែដំណើរការជាធម្មតាតែម្តងប៉ុណ្ណោះ ដើម្បីធានាបាននូវ peripherals ត្រឹមត្រូវ។ ឥឡូវនេះ អ្នកអាចសាកល្បងមុខងាររបស់មនុស្សយន្ត ដើម្បីបើកដំណើរការមុខងារឧបករណ៍បញ្ជា ROS 2 សូមដំណើរការ៖ “បើកដំណើរការ turn_on_wheeltec_robot turn_on_wheeltec_robot.launch”
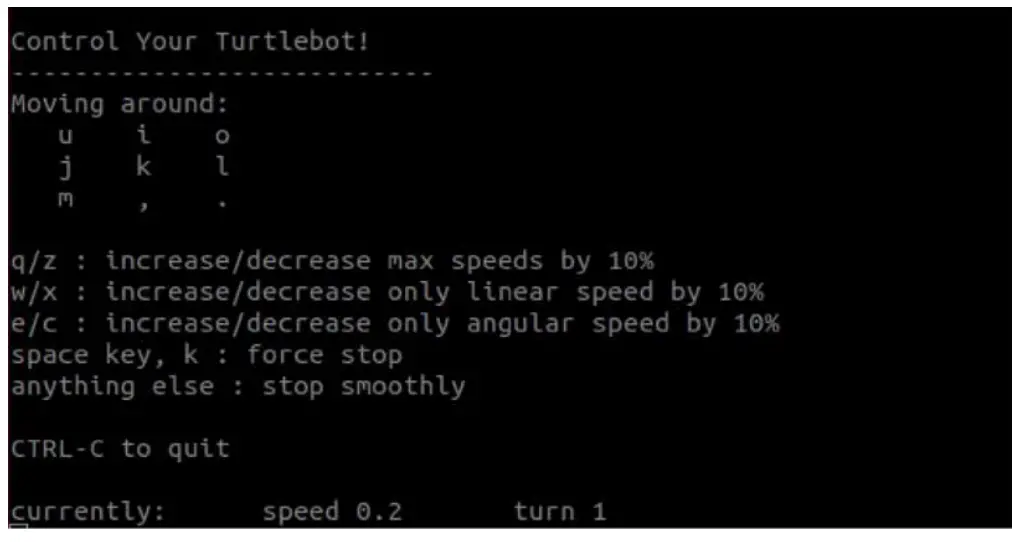
នៅក្នុងស្ថានីយទីពីរ អ្នកអាចប្រើថ្នាំង keyboard_teleop ដើម្បីធ្វើសុពលភាពការគ្រប់គ្រងតួ នេះជាកំណែដែលបានកែប្រែនៃ ROS 2 Turtlebot ex ដ៏ពេញនិយមampលេ ប្រភេទ៖ “បើកដំណើរការឡើងវិញ wheeltec_robot_rc keyboard_teleop.launch”
ROS 2 Humble Packages ដែលបានដំឡើងជាមុន
ខាងក្រោមនេះជាកញ្ចប់ដែលផ្តោតលើអ្នកប្រើប្រាស់ ខណៈពេលដែលកញ្ចប់ផ្សេងទៀតអាចមានវត្តមាន ទាំងនេះគ្រាន់តែជាភាពអាស្រ័យប៉ុណ្ណោះ។
- turn_on_wheeltec_robot
កញ្ចប់នេះគឺមានសារៈសំខាន់សម្រាប់ការបើកដំណើរការមុខងារមនុស្សយន្ត និងការទំនាក់ទំនងជាមួយឧបករណ៍បញ្ជាតួ។ ស្គ្រីបចម្បង “turn_on_wheeltec_robot.launch” ត្រូវតែប្រើនៅពេលចាប់ផ្ដើមនីមួយៗ ដើម្បីកំណត់រចនាសម្ព័ន្ធ ROS 2 និងឧបករណ៍បញ្ជា។ - wheeltec_rviz2
មានការបើកដំណើរការ files ដើម្បីបើកដំណើរការ viz ជាមួយនឹងការកំណត់ផ្ទាល់ខ្លួនសម្រាប់ Pickerbot Pro ។ - wheeltec_robot_slam
SLAM Mapping និងកញ្ចប់មូលដ្ឋានីយកម្មជាមួយនឹងការកំណត់ផ្ទាល់ខ្លួនសម្រាប់ Pickerbot Pro ។ - wheeltec_robot_rrt2
ការរុករកយ៉ាងរហ័សនូវក្បួនដោះស្រាយដើមឈើចៃដន្យ – កញ្ចប់នេះអនុញ្ញាតឱ្យ Pickerbot Pro រៀបចំផែនការផ្លូវទៅកាន់ទីតាំងដែលចង់បាន ដោយបើកដំណើរការថ្នាំងរុករក។ - wheeltec_robot_keyboard
កញ្ចប់ងាយស្រួលសម្រាប់ផ្ទៀងផ្ទាត់មុខងារមនុស្សយន្ត និងការគ្រប់គ្រងដោយប្រើក្តារចុច រួមទាំងពីកុំព្យូទ័រម៉ាស៊ីនពីចម្ងាយ។ - wheeltec_robot_nav2
កញ្ចប់ថ្នាំង ROS 2 Navigation 2 ។ - wheeltec_lidar_ros2
កញ្ចប់ ROS 2 Lidar សម្រាប់កំណត់រចនាសម្ព័ន្ធ Leishen M10/N10 ។ - wheeltec_joy
កញ្ចប់គ្រប់គ្រងយ៉យស្ទីកមានការចាប់ផ្តើម files សម្រាប់ថ្នាំងយ៉យស្ទីក។ - simple_follower_ros2
វត្ថុ និងបន្ទាត់មូលដ្ឋានតាមក្បួនដោះស្រាយដោយប្រើទាំងការស្កែនឡាស៊ែរ ឬកាមេរ៉ាជម្រៅ។ - ros2_astra_camera
កញ្ចប់កាមេរ៉ាជម្រៅ Astra ជាមួយកម្មវិធីបញ្ជា និងបើកដំណើរការ files.
សង្ខេប
មនុស្សយន្តត្រូវបានរចនាឡើងសម្រាប់អ្នកអភិវឌ្ឍន៍ ROS (Robot Operating System) អ្នកអភិវឌ្ឍន៍ អ្នកអប់រំ និងសិស្ស។ បេះដូងនៃ Rosbot គឺជាក្របខ័ណ្ឌកម្មវិធីដែលអាចសរសេរកម្មវិធីបានពេញលេញ និងស្ថាបត្យកម្មផ្នែករឹងដែលអាចកំណត់រចនាសម្ព័ន្ធបានដោយផ្អែកលើវេទិកាមនុស្សយន្តដ៏ពេញនិយមបំផុត - ROS ។
មនុស្សយន្តនេះមានបីប្រភេទ៖
- មនុស្សយន្ត ២- សាកសមសម្រាប់អ្នកចាប់ផ្តើមដំបូង ROS និងគម្រោងថវិកាទាប។
- Robot Pro - ស័ក្តិសមសម្រាប់អ្នកអភិវឌ្ឍន៍ និងអ្នកអប់រំ ROS ដែលត្រូវការប្រព័ន្ធដែលអាចប្រើប្រាស់បានសម្រាប់ការធ្វើគំរូ ឬបង្រៀនយ៉ាងឆាប់រហ័ស។
- Rosbot បូក - នេះគឺជាកំណែ 4WD របស់ Rosbot ជាមួយនឹងប្រព័ន្ធ Suspension ឯករាជ្យ។ ប្រភេទនេះគឺធ្ងន់ធ្ងរគ្រប់គ្រាន់ដើម្បីពិចារណាសម្រាប់ការអភិវឌ្ឍន៍ឧស្សាហកម្ម និងពាណិជ្ជកម្ម។ មនុស្សយន្តនេះភ្ជាប់មកជាមួយឧបករណ៍បញ្ជា ROS ដ៏ពេញនិយមដូចជា៖
- Jetson Orin Nano
- Jetson Orin NX
រៀបចំដោយ: Wayne Liu, Reilly Smithers & Tara Hercz ថ្ងៃទី 30 ខែកញ្ញា ឆ្នាំ 2024
កំណែ #៖ 20240930
ឯកសារ/ធនធាន
 |
ROBOWORKS N10 Robot Educational Programable មនុស្សយន្តចល័ត [pdf] សៀវភៅណែនាំអ្នកប្រើប្រាស់ N10 មនុស្សយន្តសម្រាប់កម្មវិធីអប់រំសម្រាប់មនុស្សយន្ត, N10, មនុស្សយន្តសម្រាប់កម្មវិធីអប់រំមនុស្សយន្ត, មនុស្សយន្តចល័តសម្រាប់កម្មវិធីអប់រំ, មនុស្សយន្តចល័តកម្មវិធីបាន, មនុស្សយន្តចល័ត, មនុស្សយន្ត |