![]() ចំណុចប្រទាក់ USB CIU-2
ចំណុចប្រទាក់ USB CIU-2
ចំណុចប្រទាក់ USB CIU-3
សៀវភៅណែនាំកម្មវិធី S-Link
កម្មវិធី CIU-2 S-Link
ប៉ារ៉ាម៉ែត្រប្រតិបត្តិការនៃ servos ដែលត្រូវគ្នានឹងកម្មវិធី S-Link អាចត្រូវបានផ្លាស់ប្តូរដោយប្រើកម្មវិធី S-Link នេះ។ ទោះជាយ៉ាងណាក៏ដោយ កម្មវិធីនេះត្រូវបានប្រើក្នុងស្ថានភាពដែលកុំព្យូទ័រ និង servos ត្រូវបានភ្ជាប់ ដោយប្រើអាដាប់ទ័រ USB CIU-2/CIU-3 ដែលបានលក់ដាច់ដោយឡែក ថ្ម servo និងអាដាប់ទ័រ PC-Link (ឬមជ្ឈមណ្ឌល S-BUS) ។
*ចំណាំ៖ កម្មវិធី S-Link គឺសម្រាប់ Windows10/ Windows8.1/ Windows7/ Windows Vista ប្រើ ហើយមិនឆបគ្នាជាមួយប្រព័ន្ធប្រតិបត្តិការផ្សេងទៀតទេ។
*ចំណាំ៖ កម្មវិធី S-Link នេះមិនត្រូវគ្នាជាមួយ S907*SB Series និង S3171SB ទេ។
ការចែកចាយ និងការលើកលែងការទទួលខុសត្រូវ
- Microsoft និង Windows គឺជាពាណិជ្ជសញ្ញាដែលបានចុះបញ្ជីរបស់សាជីវកម្ម Microsoft នៅសហរដ្ឋអាមេរិក និងប្រទេសដទៃទៀត។
- សាជីវកម្ម Futaba នឹងមិនទទួលខុសត្រូវចំពោះការខូចខាតណាមួយដែលបណ្តាលមកពីការប្រើប្រាស់កម្មវិធីនេះដោយមិនគិតពីមូលដ្ឋានច្បាប់ឡើយ។ ប្រើកម្មវិធីនេះដោយផ្អែកលើកិច្ចព្រមព្រៀងនេះ។
- ការរក្សាសិទ្ធិនៃកម្មវិធី និងឯកសារនេះស្ថិតនៅជាមួយសាជីវកម្ម Futaba ។ ការចែកចាយឡើងវិញដោយគ្មានការយល់ព្រមពីម្ចាស់កម្មសិទ្ធិបញ្ញាត្រូវបានហាមឃាត់។
- វិស្វកម្មបញ្ច្រាស និងការកែប្រែកម្មវិធីនេះត្រូវបានហាមឃាត់យ៉ាងតឹងរ៉ឹង។
Zip ដែលបានទាញយក file ការទាញយក (decompression)
ឯកសារ S-Link_En_V1100 ដែលបានទាញយកគឺជាឯកសារទម្រង់ Zip ។ ស្រង់ចេញ (បង្រួម) ឯកសារនេះ។
- ជាមួយ Windows Vista/XP ចុចពីរដងលើឯកសារ S-Link_En_V1100 ដើម្បីបង្ហាញមាតិការបស់វា។
- ចុច "ស្រង់ចេញឯកសារទាំងអស់" ។ អ្នកជំនួយការស្រង់ចេញចាប់ផ្តើម។
- ស្រង់ចេញ (ពន្លា) Zip fil le S-Link_En_V1100 ទៅកាន់ទីតាំងដូចគ្នាទៅនឹងទីតាំងផ្ទុកឯកសារ Zip ។

ស្រង់ចេញ (បង្រួម) file ការបញ្ជាក់
ចូរកំណត់ឯកសារដែលបានស្រង់ចេញ (បានបង្ហាប់) ។
- នៅចុងបញ្ចប់នៃការស្រង់ចេញ (ការបង្ហាប់) ថតមួយដែលមានឈ្មោះថា S-Link_En_V1100 ដូចបានបង្ហាញខាងក្រោមត្រូវបានបង្កើត។
- ចុចពីរដង “S-Link_En_V1100”។ មាតិកានៃថតត្រូវបានបង្ហាញ។

ការដំឡើងកម្មវិធី S-Link
មុនពេលដំឡើងកម្មវិធី S-Link សូមបញ្ជាក់ថាកម្មវិធីផ្សេងទៀតទាំងអស់ត្រូវបានបិទ។
បិទការត្រួតពិនិត្យមេរោគទាំងអស់ និងកម្មវិធីស្នាក់នៅផ្សេងទៀត ប្រសិនបើមាន។
កម្មវិធីនេះត្រូវការ Microsoft .NET Framewowk 3.5 ។
ប្រសិនបើ .NET Framework 3.5 មិនត្រូវបានដំឡើងនៅក្នុងកុំព្យូទ័ររបស់អ្នកទេ វាត្រូវបានទាញយក និងដំឡើងពីអ៊ីនធឺណិតដោយស្វ័យប្រវត្តិ។
សូមចំណាំ៖ កុំព្យូទ័ររបស់អ្នកត្រូវតែភ្ជាប់ទៅអ៊ីនធឺណិត។
- ជ្រើសរើស និងចុចពីរដងលើ Folder ដែលមានឈ្មោះថា S-Link_En_V1100 ដែលបង្កើតឡើងដោយ Zip ដែលបានទាញយក file ការស្រង់ចេញ (ការបង្ហាប់) ។ មាតិកានៃថតត្រូវបានបង្ហាញ។

- ចុចទ្វេដងលើឯកសារ EXE ដែលមានឈ្មោះថា "ដំឡើង" ។
- ប្រសិនបើ “.NET Frameforwk 3.5. បង្អួច "ដំឡើង" លេចឡើងចុច "យល់ព្រម" ។
.NET Frameforwk 3.5 ត្រូវបានទាញយក និងដំឡើងពីអ៊ីនធឺណិតដោយស្វ័យប្រវត្តិ។
- បន្ទាប់ពីបង្អួច "Welcome the S-Link Setup Wizard" លេចឡើងសូមចុច "Next" ។

- បានជ្រើសរើសដើម្បីដំឡើងកម្មវិធីនេះសម្រាប់ "គ្រាន់តែខ្ញុំ" ឬសម្រាប់ "មនុស្សគ្រប់គ្នា" ។ បញ្ជាក់ថតកម្មវិធី (រក្សាទុកទិសដៅ) នៅ "ថតឯកសារ៖" ហើយចុច "បន្ទាប់" ។ ដើម្បីផ្លាស់ប្តូរថតចុច "រកមើល ... " ហើយបញ្ជាក់ថតដែលត្រូវរក្សាទុកកម្មវិធីហើយបន្ទាប់មកចុច "បន្ទាប់" ។

- បន្ទាប់ពីបង្អួច "បញ្ជាក់ការដំឡើង" លេចឡើងសូមចុច "បន្ទាប់" ។

- បន្ទាប់ពី "ការបញ្ចប់ការដំឡើង" ត្រូវបានបង្ហាញសូមចុច "បិទ" ។
ខាងលើបញ្ចប់ការដំឡើងកម្មវិធី S-Link ។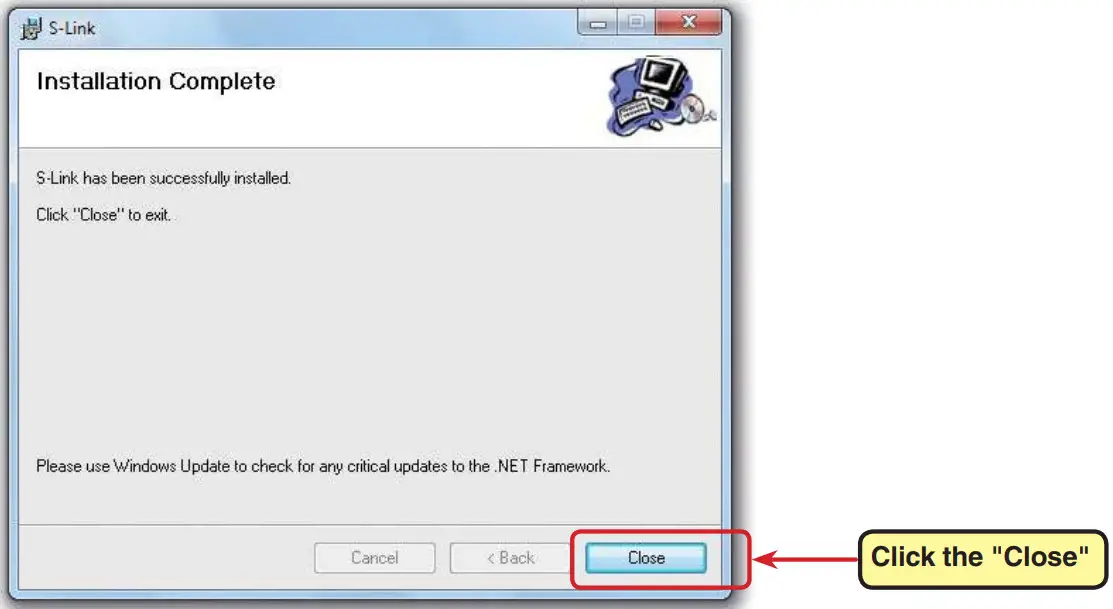
ការដកកម្មវិធី S-Link (uminstall)
- ជ្រើសរើស និងចុចពីរដងលើ Folder ដែលមានឈ្មោះថា S-Link_ En_V1100 ដែលបង្កើតឡើងដោយ Zip ដែលបានទាញយក file ការស្រង់ចេញ (ការបង្ហាប់) ។ មាតិកានៃថតត្រូវបានបង្ហាញ។

- ចុចទ្វេដងលើឯកសារ EXE ដែលមានឈ្មោះថា "S-LinkSetup-en" ។
- បន្ទាប់ពីបង្អួច "Welcome to the S-Link Setup Wizard" បើក ជ្រើសរើស "Remove S-Link" ហើយចុច "Finish"។
- បន្ទាប់ពីបង្អួច "ការដក S-Link" បើកហើយអេក្រង់ "ដំឡើងពេញលេញ"
 លេចឡើងចុច "បិទ" ។ នេះបញ្ចប់ការដកកម្មវិធី S-Link (លុបចេញ)។
លេចឡើងចុច "បិទ" ។ នេះបញ្ចប់ការដកកម្មវិធី S-Link (លុបចេញ)។
របៀបប្រើកម្មវិធី S-Link
* ដំឡើងកម្មវិធីបញ្ជាឧបករណ៍ CIU-2
អាដាប់ទ័រ USB CIU-2 គឺចាំបាច់ដើម្បីដំណើរការកម្មវិធីនេះ។ មុនពេលប្រើកម្មវិធីនេះ សូមដំឡើងកម្មវិធីបញ្ជាឧបករណ៍ CIU-2 ។ ប្រសិនបើកម្មវិធីបញ្ជាឧបករណ៍ USB CIU-2 ត្រូវបានដំឡើងរួចហើយ សូមបន្តទៅជំហានបន្ទាប់។
*កម្មវិធីបញ្ជាឧបករណ៍ CIU-2 មាននៅជ្រុងទាញយកនៃទំព័រដើមរបស់អ្នកលួច Futaba របស់អ្នក។
- ភ្ជាប់ CIU-2/3 ទៅរន្ធ USB របស់កុំព្យូទ័រដែលត្រូវប្រើ។ អំពូល LED CIU-2/3 មានពណ៌បៃតង។
- ភ្ជាប់អាដាប់ទ័រតំណ PC ឬ S.BUS hub ទៅ CIU-2/3 ។
- ភ្ជាប់ servo ទៅនឹង PC link adapter ឬ S.BUS hub ។
- ជាចុងក្រោយ ភ្ជាប់តាមលំដាប់ថ្ម។
ចំណាំ៖ នៅពេលភ្ជាប់ និងកំណត់ servo ផ្សេងទៀតផ្តាច់ថ្មជាមួយនឹង CIU-2 ដែលបានបញ្ចូលនៅច្រក USB របស់កុំព្យូទ័រ សូមភ្ជាប់ servo បន្ទាប់ហើយបន្ទាប់មកភ្ជាប់ថ្មឡើងវិញ។

ចាប់ផ្តើមកម្មវិធី S-Link
- នៅក្នុងស្ថានភាពដែល servo ត្រូវបានភ្ជាប់ទៅកុំព្យូទ័រដោយវិធីតភ្ជាប់ដែលបានពិពណ៌នាពីមុន សូមចុចពីរដងលើរូបតំណាង "S-Link Shortcut" ។
 S-Link Shortcut រូបតំណាង
S-Link Shortcut រូបតំណាង - អេក្រង់ដំឡើងប៉ារ៉ាម៉ែត្រដែលបង្ហាញខាងក្រោមលេចឡើងហើយ CIU-2 លីត្រamp អេក្រង់មានពន្លឺពណ៌បៃតង។

* នៅពេលដែល CIU-2 លីត្រamp អេក្រង់មិនមានពន្លឺពណ៌បៃតងទេ ហើយសារខាងក្រោមត្រូវបានបង្ហាញថា CIU-2/3 មិនត្រូវបានភ្ជាប់ត្រឹមត្រូវទៅកុំព្យូទ័រ។ ចុច "យល់ព្រម" ហើយពិនិត្យមើលការតភ្ជាប់។

* ការភ្ជាប់កម្មវិធី S-Link និង servo
នៅពេលភ្ជាប់ និងកំណត់ 1 servo ដូចដែលបានបង្ហាញក្នុងរូបភាពមុន បង្ហាញលេខសម្គាល់ និងប៉ារ៉ាម៉ែត្រនៃការដំឡើងបច្ចុប្បន្នដោយស្វ័យប្រវត្តិដោយចុចប៊ូតុង "ភ្ជាប់" ឬជ្រើសរើស "ភ្ជាប់" ពីម៉ឺនុយ "ឧបករណ៍" ។ សឺវ៉ូអិលamp នៅលើអេក្រង់មានពន្លឺពណ៌បៃតង។

នៅពេលភ្ជាប់ servo ច្រើនក្នុងពេលដំណាលគ្នាដោយប្រើ S.BUS hub ធីកប្រអប់ធីកនៅផ្នែកខាងឆ្វេងនៃ “ID Enable” បញ្ចូល ID នៃ servo ដែលអ្នកចង់កំណត់ ហើយចុចប៊ូតុង “Connect” ។ ប៉ារ៉ាម៉ែត្រនៃការដំឡើងបច្ចុប្បន្ននៃ servo នោះត្រូវបានបង្ហាញ និង Servo lamp នៅលើអេក្រង់មានពន្លឺពណ៌បៃតង។

នៅពេលដែល Servo លីត្រamp នៅលើអេក្រង់មិនមានពន្លឺពណ៌បៃតងទេ ហើយសារខាងក្រោមត្រូវបានបង្ហាញសូមចុច "យល់ព្រម" ហើយពិនិត្យដូចខាងក្រោម៖

- ភ្ជាប់ Servo?
- ថ្មដែលមានសមត្ថភាពគ្រប់គ្រាន់បានតភ្ជាប់?
- នៅក្នុងស្ថានភាពដែល “ID Enable” ត្រូវបានគូស តើលេខសម្គាល់ដែលបញ្ចូលដោយដៃ និងលេខសម្គាល់ដែលបានបង្ហាញត្រូវគ្នានឹង servo ដែលបានភ្ជាប់ទេ? (នៅពេលដែល 1 servo ត្រូវបានភ្ជាប់ ដោះធីក “ID Enable”)
* ការកំណត់និងកែតម្រូវប៉ារ៉ាម៉ែត្រ
ប៉ារ៉ាម៉ែត្រនីមួយៗត្រូវបានកែតម្រូវ។
* សូមមើល "ការពិពណ៌នាអំពីប៉ារ៉ាម៉ែត្រ" (P13) សម្រាប់ការពិពណ៌នាអំពីមាតិកា និងវិធីសាស្រ្តនៃប្រតិបត្តិការប៉ារ៉ាម៉ែត្រនីមួយៗ។
* សរសេរប៉ារ៉ាម៉ែត្រដំឡើង និងចាប់ផ្តើម servo
- សរសេរមាតិកាដែលបានកំណត់ទៅ servo ដោយចុចប៊ូតុង "សរសេរ" ។ មាតិកាដែលបានកំណត់ក៏អាចត្រូវបានសរសេរទៅ servo ជាមួយ "សរសេរ" នៃម៉ឺនុយ "ឧបករណ៍" ។

នៅពេលដែលការសរសេរប៉ារ៉ាម៉ែត្រនៃការដំឡើងបញ្ចប់ជាធម្មតាសារ "ជោគជ័យក្នុងការសរសេរទិន្នន័យ" ។ បង្ហាញខាងក្រោម (ខាងឆ្វេង) ។ បញ្ចប់ការសរសេរដោយចុច "យល់ព្រម" ។ ប្រសិនបើសារ "បរាជ័យក្នុងការសរសេរទិន្នន័យ" ។ បង្ហាញខាងក្រោម (ផ្នែកខាងស្តាំ) ចុចលើ "យល់ព្រម" ហើយពិនិត្យដូចខាងក្រោមៈ
- Servo ត្រូវបានភ្ជាប់យ៉ាងរឹងមាំ?
- ថ្មដែលមានសមត្ថភាពគ្រប់គ្រាន់ត្រូវបានភ្ជាប់?

ដើម្បីត្រឡប់មាតិកាដែលបានកំណត់នៅក្នុង servo ទៅការកំណត់របស់រោងចក្រ ចាប់ផ្តើម servo ដោយចុចប៊ូតុង "លំនាំដើម" ។ មាតិកានៃការដំឡើងរបស់ servo ក៏អាចចាប់ផ្តើមជាមួយ "លំនាំដើម" ពីម៉ឺនុយ "ឧបករណ៍" ។

* ដើម្បីចាប់ផ្តើម servo លេខសម្គាល់របស់វាត្រូវតែមានសុពលភាព។ នៅពេលដែល servo ដែលលេខសម្គាល់ត្រូវបានទទួលស្គាល់ដោយស្វ័យប្រវត្តិនៅការកំណត់ servo ឯករាជ្យត្រូវបានចាប់ផ្តើមសារព្រមានលេខសម្គាល់ត្រូវបានបង្ហាញ។ ចុច "យល់ព្រម" ហើយបន្ទាប់មកផ្តាច់កម្មវិធី S-Link និង servo ដោយចុចប៊ូតុង "ផ្តាច់" ។ បន្ទាប់ពីធីកប្រអប់ធីកនៅផ្នែកខាងឆ្វេងនៃ "ID Enable" ហើយភ្ជាប់កម្មវិធី S-Link និង servo ឡើងវិញ "លំនាំដើម" ត្រូវបានប្រតិបត្តិ។

នៅពេលចាប់ផ្តើមត្រូវបានប្រតិបត្តិ សារបញ្ជាក់ដែលបង្ហាញខាងក្រោមត្រូវបានបង្ហាញ។ ចុច "យល់ព្រម" ។

នៅពេលដែលការចាប់ផ្តើមបញ្ចប់ជាធម្មតាសារ "បានជោគជ័យ" ។ បង្ហាញខាងក្រោម (ខាងឆ្វេង) ។ បញ្ចប់ដោយចុចប៊ូតុង "យល់ព្រម" ។ ប្រសិនបើសារ "កំហុសក្នុងការតភ្ជាប់!" បង្ហាញនៅខាងក្រោម (ខាងស្តាំ) ចុចលើ "យល់ព្រម" ហើយពិនិត្យមើលដូចខាងក្រោម:
- Servo ត្រូវបានភ្ជាប់យ៉ាងរឹងមាំ?
- ថ្មដែលមានសមត្ថភាពគ្រប់គ្រាន់ត្រូវបានភ្ជាប់?

2. ចុចប៊ូតុង "ផ្តាច់" ។ ឬជ្រើសរើស "ផ្តាច់" ពីម៉ឺនុយ "ឧបករណ៍" ។
3. ដក servo ។

ចំណាំ៖ កុំទាញខ្សែភ្លើងចេញ ឬបិទថាមពល ខណៈពេលដែលប៉ារ៉ាម៉ែត្រកំពុងត្រូវបានសរសេរ។
ចំណាំ៖ បន្ទាប់ពីប៉ារ៉ាម៉ែត្រត្រូវបានសរសេរឡើងវិញពិនិត្យមើលទិសដៅប្រតិបត្តិការ។ ល។ ដោយការធ្វើតេស្តឋិតិវន្ត។
* ការរក្សាទុកប៉ារ៉ាម៉ែត្រដំឡើង និងការអានរក្សាទុកប៉ារ៉ាម៉ែត្រដំឡើង
មាតិកាដែលបានកំណត់អាចត្រូវបានរក្សាទុកនិងអានតែនៅក្នុងស្ថានភាព "ភ្ជាប់" ដែល servo lamp គឺបៃតង។

រក្សាទុកប៉ារ៉ាម៉ែត្រដំឡើងទៅ file
- ជ្រើសរើស "រក្សាទុក" ឬ "រក្សាទុកជា" ពី "File"ម៉ឺនុយ។
* "រក្សាទុក" សរសេរឡើងវិញនូវប៉ារ៉ាម៉ែត្រនៃការដំឡើងដែលបានបង្ហាញបច្ចុប្បន្ន។
- នៅពេលបង្កើតថ្មី។ file ដោយប្រើ "រក្សាទុកជា" ចាប់តាំងពីប្រអប់រក្សាទុកទិន្នន័យបើក ជ្រើសរើសទីតាំងរក្សាទុក ហើយរក្សាទុកកាលបរិច្ឆេទនៃការដំឡើងអេក្រង់កំណត់ប៉ារ៉ាម៉ែត្រទៅកុំព្យូទ័រដោយចុច "រក្សាទុក" ។
* ទោះយ៉ាងណាក៏ដោយ ការកំណត់ S.BUS CH មិនត្រូវបានរក្សាទុកទេ។
ការអានរក្សាទុកប៉ារ៉ាម៉ែត្រដំឡើង
- ជ្រើសរើស "បើក" ពី "File"ម៉ឺនុយ។

- នៅពេលដែលបានរក្សាទុកប៉ារ៉ាម៉ែត្រនៃការដំឡើងត្រូវបានអានចាប់តាំងពីសារដែលបានបង្ហាញខាងក្រោមដែលផ្ទេរមាតិកាដោយស្វ័យប្រវត្តិទៅ servo ត្រូវបានបង្ហាញ ដើម្បីប្រតិបត្តិពាក្យបញ្ជាអានសូមចុច "យល់ព្រម" ។

- បង្ហាញទិន្នន័យដំឡើងនៅលើអេក្រង់ដំឡើងប៉ារ៉ាម៉ែត្រ ហើយផ្ទេរមាតិការបស់វាដោយស្វ័យប្រវត្តិទៅ servo ដោយជ្រើសរើសទីតាំងរក្សាទុកនៅប្រអប់រក្សាទុកទិន្នន័យ ហើយចុច "បើក"។
ទោះយ៉ាងណាក៏ដោយ ដើម្បីទន្ទេញទិន្នន័យនោះនៅ servo ចុចប៊ូតុង "សរសេរ" នៃ P8 ហើយសរសេរទិន្នន័យទៅ servo ឬប្រតិបត្តិ "សរសេរ" ពីម៉ឺនុយ "ឧបករណ៍" ។
*ការផ្តាច់កម្មវិធី S-Link និង servo និងបញ្ចប់កម្មវិធី S-Link
- ការផ្តាច់កម្មវិធី S-Link និង servo
បន្ទាប់ពីបញ្ចប់ការងារ និងមុនពេលបិទថាមពល servo សូមបញ្ចប់ការទំនាក់ទំនងដោយចុចប៊ូតុង "ផ្តាច់" ឬដោយជ្រើសរើស "ផ្តាច់" ពីម៉ឺនុយ "ឧបករណ៍" ។ សឺវ៉ូអិលamp បិទ ហើយកម្មវិធី S-Link និង servo ត្រូវបានផ្តាច់។
- ការបញ្ចប់កម្មវិធី S-Link
ដើម្បីបញ្ចប់កម្មវិធី S-Link សូមចុច "ចេញ" នៃ "File"ម៉ឺនុយ។
ប្រសិនបើ CIU-2/3 ត្រូវបានផ្តាច់ចេញពីរន្ធ USB របស់កុំព្យូទ័រ ខណៈពេលដែលកម្មវិធី S-Link កំពុងចាប់ផ្តើម សារដែលបង្ហាញខាងក្រោមត្រូវបានបង្ហាញ។ ទោះយ៉ាងណាក៏ដោយ មិនមានបញ្ហាពិសេសជាមួយសារបញ្ជាក់នេះទេ។ ចុច "យល់ព្រម" ហើយពិនិត្យមើលការភ្ជាប់ CIU-2/3 និងការភ្ជាប់រន្ធ USB របស់កុំព្យូទ័រ។

ការពិពណ៌នាអំពីមុខងារនៃប៉ារ៉ាម៉ែត្រនីមួយៗ
* អេក្រង់ប៉ារ៉ាម៉ែត្រ
អេក្រង់ប៉ារ៉ាម៉ែត្រមានមុខងារដូចខាងក្រោមៈ
* មានមុខងារមួយចំនួនដែលមិនអាចប្រើបានអាស្រ័យលើ servo ដែលប្រើ។ នៅពេលដែលតម្លៃកំណត់មិនសមស្រប លំយោលអាចកើតឡើង ប៉ុន្តែនេះមិនមែនជាបញ្ហា servo ទេ។ ទោះយ៉ាងណាក៏ដោយ ការភ្ជាប់ servo ដែលមានលំយោលអាចបណ្តាលឱ្យម៉ូទ័រឡើងកំដៅ ហើយនាំឱ្យមានបញ្ហា។ ត្រឡប់ការកំណត់ទៅតម្លៃដើមរបស់វាភ្លាមៗ។

តម្លៃកំណត់អាចត្រូវបានផ្លាស់ប្តូរដោយចុច ឬអូសលេខទូរសព្ទ និងដងថ្លឹងនៃប៉ារ៉ាម៉ែត្រនីមួយៗ។ លើសពីនេះទៀតបន្ទាប់ពីការចុចឬកម្រិតត្រូវបានជ្រើសរើសដោយការចុច ប្រតិបត្តិការដោយកង់កណ្ដុរ និងគ្រាប់ចុចព្រួញក្តារចុចក៏អាចធ្វើទៅបានផងដែរ។
| 1) "ការបង្ហាញទិន្នន័យទីតាំង Servo និងការកំណត់" 2) ប៊ូតុង "ភ្ជាប់" 3) ប៊ូតុង "ផ្តាច់" 4) "ការបង្ហាញស្ថានភាពការតភ្ជាប់" 5) "លេខសម្គាល់។ ការដំឡើង S.BUS CH” ៦) "អព្យាក្រឹតភាព" 7) "ការកែតម្រូវការធ្វើដំណើរ" 8) "ក្រុមតន្រ្តីស្លាប់" 9) "ជំរុញ" 10) "បើក / បិទ" |
១១) ការគ្រប់គ្រងល្បឿន ១២) “ឃampកត្តា” 13) "ការទទួលបាន Stretcher" ១៤) “ការចាប់ផ្តើមទន់” 15) "បញ្ច្រាស" 16) "របៀបបញ្ឈប់" 17) "Buzzer" 18) "រលោង" 19) ប៊ូតុង "សរសេរ" 20) ប៊ូតុង "លំនាំដើម" |
ការបង្ហាញព័ត៌មានទីតាំង Servo និងការកំណត់
ការកំណត់នេះផ្លាស់ប្តូរទីតាំង servo ។ ប្រតិបត្តិការ Servo បន្ទាប់ពីការផ្លាស់ប្តូរប៉ារ៉ាម៉ែត្រក៏អាចត្រូវបានត្រួតពិនិត្យផងដែរ។
- ឧបករណ៍វាស់ស្ទង់ព័ត៌មានទីតាំង (angie)
ម្ជុលម៉ែត្របង្ហាញទីតាំង servo និងត្រូវបានភ្ជាប់ជាមួយទីតាំងរំកិល។ - ព័ត៌មានទីតាំង PWM ទទឹង (ys)
បង្ហាញទីតាំង servo ដោយទទឹង PWM - អត្រាព័ត៌មានទីតាំង (%)
បង្ហាញទីតាំង servo ជាមួយកណ្តាល 0% និង 60 ដឺក្រេជា 100% ។
- ប្រអប់អត្ថបទផ្លាស់ប្តូរទីតាំង
បង្ហាញទីតាំង servo ដោយទទឹង PWM ។ ទីតាំងអាចត្រូវបានផ្លាស់ប្តូរដោយប្រើប៊ូតុងឡើងលើ/ចុះក្រោមនៅខាងស្តាំ។ - គ្រាប់រំកិល
នៅពេលដែលគ្រាប់រំកិលត្រូវបានផ្លាស់ទីខណៈពេលចុចដោយប្រើកណ្ដុរ servo ដំណើរការលើសពីជួរអតិបរមា 600 ឆ្វេង និងស្តាំ ដោយមានចំណុចកណ្តាលជា Odegrees ។ - ជួរផ្លាស់ទី
បង្ហាញទីតាំងកណ្តាលអុហ្វសិតដោយការលៃតម្រូវអព្យាក្រឹត និងជួរផ្លាស់ទីដោយការលៃតម្រូវការធ្វើដំណើរ។ - ការកំណត់ទីតាំងផ្ទាល់
នៅពេលដែលប៊ូតុងកំណត់ទទឹង PWM ត្រូវបានចុច servo ផ្លាស់ទីទៅទីតាំងទទឹង PWM ដែលបានបញ្ជាក់។
ប៊ូតុង "ភ្ជាប់" និង "ផ្តាច់"
ភ្ជាប់ និងផ្តាច់ទំនាក់ទំនងរវាងកម្មវិធី S-Link និង servo ។

- ប៊ូតុង "ភ្ជាប់"
នៅពេលចុចប៊ូតុង "ភ្ជាប់" កម្មវិធីទាក់ទងជាមួយ servo និងអានប៉ារ៉ាម៉ែត្រនៃ servo នោះហើយបង្ហាញពួកវានៅលើអេក្រង់។ - ប៊ូតុង "ផ្តាច់"
នៅពេលចុចប៊ូតុង "ផ្តាច់" ការទំនាក់ទំនងជាមួយ servo ត្រូវបានរំខាន។ ប៊ូតុង "ផ្តាច់" មិនមានប្រសិទ្ធភាពទេ ប្រសិនបើការទទួលស្គាល់ servo ដោយ "ភ្ជាប់" មិនជោគជ័យ។
ការបង្ហាញស្ថានភាពការតភ្ជាប់
បង្ហាញ CIU-2/3 និងកុំព្យូទ័រ និងកម្មវិធី S-Link និងស្ថានភាពការតភ្ជាប់ servo ។

- CIU-2 លីត្រamp
នៅពេលដែល CIU-2/3 ត្រូវបានភ្ជាប់ទៅកុំព្យូទ័រ, នេះ lamp ភ្លើងពណ៌បៃតង។ - Servo លីត្រamp
នៅពេលដែល servo ត្រូវបានភ្ជាប់ដោយប៊ូតុង "ភ្ជាប់" នេះ lamp ភ្លើងពណ៌បៃតង។ - S.BUS2 លីត្រamp
នៅពេលដែល servo ដែលបានតភ្ជាប់គឺត្រូវគ្នាជាមួយប្រព័ន្ធ S-BUS2 នេះ lamp ភ្លើងពណ៌បៃតង។
លេខសម្គាល់។ ការកំណត់ S.BUS CH (ឆានែល)
- ID
នៅពេលភ្ជាប់ 1 servo ទៅ CiU-2/3 ដោះធីកប្រអប់ "ID Enable" បន្ទាប់មកចុចប៊ូតុង "Connect" ឬជ្រើសរើស "Connect" ពី "Tool" menu ។ ប៉ារ៉ាម៉ែត្រត្រូវបានអានហើយលេខសម្គាល់ servo ត្រូវបានបង្ហាញ។ លេខសម្គាល់មិនអាចផ្លាស់ប្តូរបានទេ។ ប្រសិនបើប្រអប់ធីក “ID Enable” ត្រូវបានគូស សារព្រមានខាងក្រោម (ខាងឆ្វេង) នឹងត្រូវបានបង្ហាញ។ នៅពេលភ្ជាប់ servos ជាច្រើនទៅ CiIU-2/3 ធីកប្រអប់ធីក “ID Enable” បញ្ចូលលេខសម្គាល់ ID នៃត្រា ID ដែលភ្ជាប់ទៅ servo ដែលប៉ារ៉ាម៉ែត្រត្រូវអាន ហើយចុចប៊ូតុង “Connect” ឬជ្រើសរើស “ ភ្ជាប់" ពីម៉ឺនុយ "ឧបករណ៍" ។ ប្រសិនបើលេខសម្គាល់មានភាពមិនស៊ីគ្នា នោះសារកំហុសដែលបង្ហាញខាងក្រោម (ផ្នែកខាងស្តាំ) នឹងត្រូវបានបង្ហាញ ហើយទំនាក់ទំនងនឹងមិនត្រូវបានបង្កើតឡើងទេ។
នៅពេលភ្ជាប់ servos ជាច្រើនទៅ CiIU-2/3 ធីកប្រអប់ធីក “ID Enable” បញ្ចូលលេខសម្គាល់ ID នៃត្រា ID ដែលភ្ជាប់ទៅ servo ដែលប៉ារ៉ាម៉ែត្រត្រូវអាន ហើយចុចប៊ូតុង “Connect” ឬជ្រើសរើស “ ភ្ជាប់" ពីម៉ឺនុយ "ឧបករណ៍" ។ ប្រសិនបើលេខសម្គាល់មានភាពមិនស៊ីគ្នា នោះសារកំហុសដែលបង្ហាញខាងក្រោម (ផ្នែកខាងស្តាំ) នឹងត្រូវបានបង្ហាញ ហើយទំនាក់ទំនងនឹងមិនត្រូវបានបង្កើតឡើងទេ។
- S.BUS CH (ឆានែល) (S.BUS servo ប៉ុណ្ណោះ)
នេះគឺជាឆានែលដែលបានកំណត់ទៅ servo នៅពេលប្រើជាមួយប្រព័ន្ធ S.BUS ។ តែងតែកំណត់ឆានែលមុនពេលប្រើ។ នៅពេលចុចប៊ូតុង "ភ្ជាប់" លេខ CH នៃ servo ត្រូវបានបង្ហាញ។ កិច្ចការ CH អាចត្រូវបានផ្លាស់ប្តូរនៅទីនេះ។ - ប៊ូតុង "ផ្លាស់ប្តូរ"
ប៊ូតុងនេះត្រូវបានប្រើជាមួយប្រព័ន្ធ S.BUS ហើយនៅពេលផ្លាស់ប្តូរឆានែលដែលបានកំណត់ទៅ servo ។
របៀបផ្លាស់ប្តូរ S.BUS CH (channel) change

"មានតែការដំឡើង S.BUS CH (channel) ប៉ុណ្ណោះដែលត្រូវបានបញ្ចប់ដោយចុចប៊ូតុង "សរសេរ" ។
អុហ្វសិតអព្យាក្រឹត
ទីតាំងអព្យាក្រឹតអាចត្រូវបានផ្លាស់ប្តូរ។ ទោះជាយ៉ាងណាក៏ដោយនៅពេលដែលទីតាំងអព្យាក្រឹតត្រូវបានផ្លាស់ប្តូរយ៉ាងខ្លាំង ការបោះ servo អាចនឹងលើសពីការធ្វើដំណើរអតិបរមា ហើយក្រុមតន្រ្តីស្លាប់ដែល servo មិនដំណើរការអាចត្រូវបានបង្កើត។
(ការកំណត់ជួរ៖ -32.0deg ដល់ +31.75deg ដោយផ្អែកលើទីតាំងលំនាំដើម)
- កំណត់ការប្ដូរតម្លៃហៅទូរសព្ទ
ផ្លាស់ប្តូរតម្លៃកំណត់អុហ្វសិត។ - កំណត់តម្លៃបង្ហាញលេខ
បង្ហាញតម្លៃកំណត់ជាតម្លៃលេខ។ តម្លៃលេខមិនអាចបញ្ចូលបានទេ។
- ការបង្ហាញអុហ្វសិត
បង្ហាញក្រាហ្វិកអុហ្វសិត។ - ប៊ូតុងកំណត់ឡើងវិញ
ត្រឡប់ទៅតម្លៃកំណត់ដែលបានសរសេរចុងក្រោយ។
ការកែតម្រូវការធ្វើដំណើរ
ការធ្វើដំណើរឆ្វេង និងស្តាំអតិបរមាដែលផ្តោតលើទីតាំងអព្យាក្រឹតអាចត្រូវបានកំណត់ដោយឯករាជ្យ។ (ការកំណត់ជួរ៖ ៥០% ទៅ ១៤៩.៦%)
- ការកំណត់ការលៃតម្រូវការធ្វើដំណើរខាងឆ្វេង ប្តូរតម្លៃចុច
ផ្លាស់ប្តូរតម្លៃកំណត់ការកំណត់ការធ្វើដំណើរ។ - ការកំណត់តម្លៃកំណត់ការលៃតម្រូវការធ្វើដំណើរស្តាំ
ផ្លាស់ប្តូរតម្លៃកំណត់ការកំណត់ការធ្វើដំណើរ។
- កំណត់តម្លៃបង្ហាញលេខ
បង្ហាញការកែតម្រូវការធ្វើដំណើរជាតម្លៃលេខ។ តម្លៃលេខមិនអាចបញ្ចូលបានទេ។ - ប៊ូតុងកំណត់ឡើងវិញ
ត្រឡប់ទៅតម្លៃកំណត់ដែលបានសរសេរចុងក្រោយ។
ក្រុមតន្រ្តីស្លាប់
អាចកំណត់ទីតាំងបញ្ឈប់ជួរក្រុមដែលស្លាប់ (មុំ)។ (ជួរកំណត់: 0.00deg ដល់ 3.98deg)
ទំនាក់ទំនងរវាងតម្លៃកំណត់នៃក្រុមតន្រ្តីស្លាប់ និងប្រតិបត្តិការ servo
Dead band small: បញ្ឈប់ទីតាំង dead band width តូច។ servo ឆ្លើយតបភ្លាមៗចំពោះការផ្លាស់ប្តូរសញ្ញានាទី។
ក្រុមស្លាប់ធំ៖ ទីតាំងឈប់ ទទឹងក្រុមតន្រ្តីធំ។ servo មិនឆ្លើយតបទៅនឹងការផ្លាស់ប្តូរសញ្ញានាទី។
ចំណាំ៖ ប្រសិនបើមុំទទឹងក្រុមតន្រ្តីស្លាប់តូចពេក។ ចាប់តាំងពី servo នឹងដំណើរការជាបន្តបន្ទាប់។ ការប្រើប្រាស់បច្ចុប្បន្ននឹងកើនឡើង ហើយអាយុកាលរបស់ servo នឹងត្រូវបានខ្លី។
- កំណត់ការប្ដូរតម្លៃហៅទូរសព្ទ
ផ្លាស់ប្ដូរតម្លៃកំណត់ក្រុមដែលស្លាប់។ - កំណត់តម្លៃបង្ហាញលេខ
បង្ហាញក្រុមដែលស្លាប់ជាតម្លៃលេខ។ តម្លៃលេខមិនអាចបញ្ចូលបានទេ។
- ប៊ូតុងកំណត់ឡើងវិញ
ត្រឡប់ទៅតម្លៃកំណត់ដែលបានសរសេរចុងក្រោយ។
ជំរុញ
ការជំរុញអប្បបរមាដែលបានអនុវត្តចំពោះម៉ូទ័រខាងក្នុងនៅពេលដែល servo ត្រូវបានជំរុញអាចត្រូវបានកំណត់។ (ការកំណត់ជួរ៖ ៣% ទៅ ៤៥%)
ដោយសារម៉ូទ័រមិនត្រូវបានចាប់ផ្តើមដោយការជំរុញអប្បបរមា សំខាន់វាមានអារម្មណ៍ថាខ្សែរស្លាប់បានពង្រីក។
ដូច្នេះសូមកែតម្រូវការជំរុញអប្បបរមានៅពេលចាប់ផ្តើមដើម្បីឱ្យម៉ូទ័រចាប់ផ្តើមភ្លាមៗ។
ទំនាក់ទំនងរវាងតម្លៃកំណត់ជំរុញ និងប្រតិបត្តិការ servo
ជំរុញតូច៖ ឆ្លើយតបទៅនឹងពាក្យបញ្ជានាទី ហើយប្រតិបត្តិការក្លាយជារលូន។
បង្កើនទំហំធំ៖ ការឆ្លើយតបដំបូងគឺល្អ ហើយកម្លាំងបង្វិលជុំទិន្នផលមានទំហំធំ ប៉ុន្តែប្រសិនបើធំពេក ប្រតិបត្តិការនឹងរដុប។
- កំណត់ការប្ដូរតម្លៃហៅទូរសព្ទ
ផ្លាស់ប្តូរតម្លៃកំណត់ជំរុញ។ - កំណត់តម្លៃបង្ហាញលេខ
បង្ហាញការជំរុញជាតម្លៃលេខ។ តម្លៃលេខមិនអាចបញ្ចូលបានទេ។
- ប៊ូតុងកំណត់ឡើងវិញ
ត្រឡប់ទៅតម្លៃកំណត់ដែលបានសរសេរចុងក្រោយ។
បើក/បិទ
ប្តូររវាងរបៀបដែលបើកមុខងារជំរុញតែនៅពេលដែល servo ត្រូវបានដំណើរការក្នុងល្បឿនយឺត និងរបៀបដែលបើកការជំរុញធម្មតា។
បើកក្នុងល្បឿនយឺត (ជាធម្មតាប្រើនៅការកំណត់នេះ។)
ជាធម្មតាបើក (នៅពេលចង់បានប្រតិបត្តិការរហ័ស)

ការត្រួតពិនិត្យល្បឿន
កំណត់ល្បឿនប្រតិបត្តិការ។ ឥទ្ធិពលនៃវ៉ុលtage កម្លាំងបង្វិលជុំ ម៉ូទ័រ និងការផ្លាស់ប្តូរផ្សេងទៀតអាចត្រូវបានលុបចោល ហើយល្បឿននៃ servos ច្រើនអាចត្រូវបានផ្គូផ្គង។
(ជួរការកំណត់៖ អតិបរមា 0.047 វិ / 60 ដឺក្រេដល់ 12 វិ / 60 ដឺក្រេ ឬគ្មាន)
ទោះយ៉ាងណាក៏ដោយ សូមចំណាំថា ទោះបីជាកំណត់លើសល្បឿនអតិបរមានៃ servo នៅវ៉ុលប្រតិបត្តិការនីមួយៗក៏ដោយ។tage ល្បឿនមិនក្លាយជាល្បឿនលើសពីល្បឿនអតិបរមាទេ។
- កំណត់ការប្ដូរតម្លៃហៅទូរសព្ទ
ផ្លាស់ប្តូរតម្លៃកំណត់នៃការគ្រប់គ្រងល្បឿន។ - កំណត់តម្លៃបង្ហាញលេខ
បង្ហាញការគ្រប់គ្រងល្បឿនជាតម្លៃលេខ។ តម្លៃលេខមិនអាចបញ្ចូលបានទេ។ - ប៊ូតុងកំណត់ឡើងវិញ
ត្រឡប់ទៅតម្លៃកំណត់ដែលបានសរសេរចុងក្រោយ។ - ការគ្រប់គ្រងល្បឿនបើក / បិទ
នៅពេលធីក ការកំណត់ការគ្រប់គ្រងល្បឿនត្រូវបានបើក។
(ដែនកំណត់ខាងលើល្បឿន servo ពិតប្រាកដអាស្រ័យលើដំណើរការនៃ servo នីមួយៗ។ )

Dampកត្តា
លក្ខណៈនៅពេលដែល servo ឈប់អាចត្រូវបានកំណត់។ (ជួរកំណត់៖ ០ ដល់ ២៥៥)
នៅពេលដែលតូចជាងតម្លៃស្ដង់ដារ ចរិតលក្ខណៈក្លាយទៅជាហួសហេតុ (ត្រឡប់មកវិញបន្ទាប់ពីធ្វើដំណើរឆ្ងាយពេក) លក្ខណៈ។ នៅពេលដែលតម្លៃធំ ការកំណត់ឈប់ប្រើហ្វ្រាំងមុនពេលទីតាំងឈប់។
ធ្វើឱ្យវាពិបាកជាពិសេសសម្រាប់ servo ក្នុងការបរបាញ់ (បាតុភូតដែលបណ្តាលឱ្យ servo ទៅជាលំយោល) ដោយការទប់ស្កាត់ការហៀរចេញដោយសារតែនិចលភាពនៅពេលដែលបន្ទុកធំត្រូវបានអនុវត្ត។
នៅពេលដែលការបរបាញ់កើតឡើង ទោះបីជា Dead Band, Stretcher និងប៉ារ៉ាម៉ែត្រផ្សេងទៀតគឺសមរម្យ លៃតម្រូវប៉ារ៉ាម៉ែត្រនេះទៅតម្លៃធំជាងតម្លៃដំបូង។
ទំនាក់ទំនងរវាង ឃampការកំណត់តម្លៃនិងប្រតិបត្តិការ servo
Dampតូច៖ នៅពេលអ្នកចង់ជ្រុល។ កំណត់ដូច្នេះការបរបាញ់មិនកើតឡើង។
Dampធំ : នៅពេលអ្នកចង់ធ្វើប្រតិបត្តិការដូចជាការហ្វ្រាំងត្រូវបានអនុវត្ត។ ទោះយ៉ាងណាក៏ដោយ វាហាក់ដូចជាការឆ្លើយតបរបស់ servo ខ្សោយ។
ចំណាំ៖ នៅពេលប្រើក្នុងស្ថានភាពដែលការបរបាញ់កើតឡើងមិនត្រឹមតែការកើនឡើងនៃការប្រើប្រាស់នាពេលបច្ចុប្បន្នប៉ុណ្ណោះទេ ប៉ុន្តែអាយុកាលរបស់ servo ក៏នឹងខ្លីផងដែរ។
- កំណត់ការប្ដូរតម្លៃហៅទូរសព្ទ
ផ្លាស់ប្តូរ ឃampទទួលបានតម្លៃកំណត់។ - កំណត់តម្លៃបង្ហាញលេខ
បង្ហាញ ឃampការកើនឡើងជាតម្លៃលេខ។ តម្លៃលេខមិនអាចបញ្ចូលបានទេ។
- ប៊ូតុងកំណត់ឡើងវិញ
ត្រឡប់ទៅតម្លៃកំណត់ដែលបានសរសេរចុងក្រោយ។
ផលចំណេញរបស់ stretcher
លក្ខណៈនៃការសង្កត់ servo អាចត្រូវបានកំណត់។ (ជួរការកំណត់៖ x0.125 ដល់ x8)
នៅពេលដែលទីតាំង servo បច្ចុប្បន្នងាកចេញពីទីតាំងគោលដៅ កម្លាំងបង្វិលជុំដែលព្យាយាមត្រឡប់ servo ទៅទីតាំងគោលដៅអាចត្រូវបានកែតម្រូវ។ វាត្រូវបានប្រើដើម្បីបញ្ឈប់ការបរបាញ់។
ទំនាក់ទំនងរវាងតម្លៃកំណត់របស់ stretcher និងប្រតិបត្តិការ servo
Stretcher តូច៖ កម្លាំងទប់ Servo ខ្សោយ
Stretcher ធំ : Servo កាន់កម្លាំងខ្លាំង
ចំណាំ៖ នៅពេលដែល stretcher មានទំហំធំ។ ការប្រើប្រាស់បច្ចុប្បន្នកើនឡើង។
- កំណត់ការប្ដូរតម្លៃហៅទូរសព្ទ
ផ្លាស់ប្តូរតម្លៃកំណត់នៃការទទួលបាន stretcher ។ - កំណត់តម្លៃបង្ហាញលេខ
បង្ហាញការទទួលបាន stretcher ជាតម្លៃលេខ។ តម្លៃលេខមិនអាចបញ្ចូលបានទេ។
- ប៊ូតុងកំណត់ឡើងវិញ
ត្រឡប់ទៅតម្លៃកំណត់ដែលបានសរសេរចុងក្រោយ។
ការចាប់ផ្តើមទន់
ដាក់កម្រិតប្រតិបត្តិការក្នុងទិសដៅដែលបានបញ្ជាក់ភ្លាមៗដែលថាមពលត្រូវបានបើក។ តាមរយៈការកំណត់នេះ មានតែប្រតិបត្តិការដំបូងប៉ុណ្ណោះ នៅពេលដែលថាមពលត្រូវបានបើកយឺតៗ ផ្លាស់ទី servo ទៅទីតាំងដែលបានបញ្ជាក់។
(ជួរកំណត់៖ ០.៨ វិ / ៦០ ដឺក្រេដល់ ១២ វិនាទី / ៦០ ដឺក្រេឬគ្មាន)
- កំណត់ការប្ដូរតម្លៃហៅទូរសព្ទ
ផ្លាស់ប្តូរតម្លៃកំណត់ការពន្យាពេលចាប់ផ្តើមទន់។ - កំណត់តម្លៃបង្ហាញលេខ
បង្ហាញការពន្យាពេលចាប់ផ្តើមទន់ជាតម្លៃលេខ។ តម្លៃលេខមិនអាចបញ្ចូលបានទេ។
- ប៊ូតុងកំណត់ឡើងវិញ
ត្រឡប់ទៅតម្លៃកំណត់ដែលបានសរសេរចុងក្រោយ។ - ការពន្យាពេលចាប់ផ្តើមទន់ បើក/បិទ
នៅពេលធីកការកំណត់ការបង្ហាញការចាប់ផ្តើមទន់ត្រូវបានបើក។
Servo បញ្ច្រាស (ធម្មតា / បញ្ច្រាស)
ទិសដៅនៃការបង្វិល servo អាចត្រូវបានផ្លាស់ប្តូរ។
នៅពេលអ្នកចង់ឱ្យ servo បង្វិលក្នុងទិសដៅផ្ទុយពីទិសស្តង់ដារ កំណត់ទៅ "បញ្ច្រាស" ។

របៀបបញ្ឈប់ (ឥតគិតថ្លៃ/សង្កត់)
ស្ថានភាពនៃ servo នៅពេលដែលសញ្ញាបញ្ចូល servo ត្រូវបានរំខានអាចត្រូវបានបញ្ជាក់។
ទោះយ៉ាងណាក៏ដោយនៅពេលដែល "ទំនេរ" servo ខ្សោយហើយនៅពេលដែល "សង្កត់" មុំភ្លាមៗមុនពេលសញ្ញាត្រូវបានរំខានត្រូវបានប្រារព្ធឡើង។
របៀបរក្សា servo អាចត្រូវបានកំណត់សូម្បីតែជាមួយប្រព័ន្ធ AM និង FM ក៏ដោយ។
ទោះយ៉ាងណាក៏ដោយមិនមានមុខងារសុវត្ថិភាពបរាជ័យទេ។

Buzzer (បើក/បិទ)
នៅពេលដែលសំឡេងរោទិ៍ត្រូវបានកំណត់ទៅ ON នៅពេលដែលថាមពល servo ត្រូវបានបើកជាលើកដំបូងដោយគ្មានឧបករណ៍បញ្ជូនដែលបញ្ចេញរលកវិទ្យុ servo បន្តបញ្ចេញសំឡេង buzzer 2.5 ដង / វិនាទី។
(សូម្បីតែនៅពេលដែលរលកវិទ្យុបញ្ជូនចេញដំបូងក៏ដោយ ក៏សំឡេងរោទិ៍រហូតដល់សញ្ញា servo ចេញជាធម្មតា ប៉ុន្តែនេះគឺជារឿងធម្មតា។ )
នៅពេលដែលថាមពលបញ្ជូនត្រូវបានបិទដំបូងនៅចុងបញ្ចប់នៃប្រតិបត្តិការ សំឡេងរោទិ៍ 1.25 ដង/វិនាទី ជាសំឡេងរោទិ៍ដែលអ្នកភ្លេចបិទថាមពល servo ។
ទោះយ៉ាងណាក៏ដោយ វាប្រហែលជាមិនកើតឡើងទេ អាស្រ័យលើប្រភេទនៃ servo ។

(ប្រសិនបើឧបករណ៍ភ្ជាប់ servo ត្រូវបានផ្តាច់ខណៈពេលដែលថាមពលអ្នកទទួលត្រូវបានបើក ដោយសារ servo ដែលភ្ជាប់ S-BUS នឹងត្រូវបានទទួលស្គាល់ដោយខុស ហើយសំឡេងបញ្ជាក់អាចនឹងត្រូវបានបង្កើត កុំផ្តាច់ឧបករណ៍ភ្ជាប់ខណៈពេលដែលថាមពលត្រូវបានបើក។ )
ចំណាំ៖ ដោយសារសំឡេង buzzer ត្រូវបានបង្កើតដោយការយោលម៉ូទ័រ servo ហើយចរន្តត្រូវបានប្រើប្រាស់ ហើយកំដៅត្រូវបានបង្កើត សូមកុំដំណើរការលើសពីការចាំបាច់ ឬបន្តបន្លឺសំឡេងរោទិ៍រយៈពេលយូរ។
រលោង (បើក/បិទ)
មុខងារនេះធ្វើឱ្យប្រតិបត្តិការ servo រលូន។ កំណត់វាតាមរសជាតិរបស់អ្នក។ ជាធម្មតាកំណត់វាទៅ ON ។ កំណត់វាឱ្យបិទនៅពេលដែលចង់បាន ជាពិសេសប្រតិបត្តិការរហ័ស។
នៅពេលដែលមុខងាររលោងត្រូវបានកំណត់ទៅ ON ហើយ servo ត្រូវបានដំណើរការ ចម្ងាយរហូតដល់ទីតាំងគោលដៅត្រូវបានផ្លាស់ប្តូរជាជំហានៗ ដូច្នេះចលនាគឺរលូន។

ប៊ូតុងសរសេរ
នៅពេលដែលប៉ារ៉ាម៉ែត្រនៅលើអេក្រង់មេ S-Link ត្រូវបានផ្លាស់ប្តូរ ប៉ារ៉ាម៉ែត្រ servo ត្រូវបានផ្លាស់ប្តូរជាបណ្តោះអាសន្ន ហើយនៅពេលដែលថាមពលត្រូវបានបិទ ពួកវាត្រឡប់ទៅតម្លៃរបស់ពួកគេវិញមុនពេលការផ្លាស់ប្តូរ។ ដូច្នេះ ដើម្បីកត់ត្រាប៉ារ៉ាម៉ែត្រដែលបានផ្លាស់ប្តូរនៅ servo សូមចុចប៊ូតុង សរសេរ”។

ប៊ូតុងលំនាំដើម
ប៊ូតុង "លំនាំដើម" ត្រឡប់ប៉ារ៉ាម៉ែត្រ servo ទៅការកំណត់រោងចក្ររបស់ពួកគេ។
* "លំនាំដើម" ទាមទារអត្តសញ្ញាណប័ណ្ណដែលមានសុពលភាព។ នៅពេលដែលលេខសម្គាល់ត្រូវបានទទួលស្គាល់ដោយស្វ័យប្រវត្តិដោយការកំណត់ servo ឯករាជ្យចុចប៊ូតុង "ផ្តាច់" ដើម្បីផ្តាច់កម្មវិធី S.Link និង servo ។ បន្ទាប់ពីធីកប្រអប់ធីកនៅផ្នែកខាងឆ្វេងនៃ "ID Enable" ហើយភ្ជាប់កម្មវិធីនិង servo ឡើងវិញដោយប្រើប៊ូតុង "Connect" ប្រតិបត្តិ "លំនាំដើម" ។

* ម៉ឺនុយឧបករណ៍
ម៉ឺនុយឧបករណ៍មានមុខងារ "ភាសា" និង "ការកំណត់" បន្ថែមពីលើមុខងារ "ភ្ជាប់" "ផ្តាច់" "សរសេរ" និង "លំនាំដើម" ដែលបានពិពណ៌នានៅទីនេះ។
"ភាសា"
មុខងារនេះអនុញ្ញាតឱ្យអ្នកជ្រើសរើសភាសាបង្ហាញកម្មវិធី S-Link ពីក្នុងចំណោមភាសាអង់គ្លេស ជប៉ុន និង Deutsch ។

"ការកំណត់"
នៅពេលដែល "ការកំណត់" នៅក្នុងម៉ឺនុយ "ឧបករណ៍" ត្រូវបានចុច អេក្រង់ដែលបង្ហាញខាងក្រោមនឹងលេចឡើង។

"នៅពេល "នៅពេលបញ្ចប់ ទិន្នន័យនៅលើអេក្រង់មិនត្រូវបានរក្សាទុកទេ។" ប្រអប់ធីកមិនត្រូវបានធីកមុនពេលចាប់ផ្តើមទិន្នន័យប៉ារ៉ាម៉ែត្រនៅចុងបញ្ចប់នៃវគ្គចុងក្រោយត្រូវបានបង្ហាញ។
"នៅពេលដែល "ឆានែល S.BUS2 មិនត្រូវបានបង្ហាញ។" ប្រអប់ធីកត្រូវបានធីក ប្រព័ន្ធ S-BUS2 ដែលឧទ្ទិស CH បង្ហាញនៅបង្អួចដំឡើង S.BUS CH (ឆានែល) ដែលបានពិពណ៌នានៅលើ P15 ត្រូវបានលាក់។

បន្ទាប់ពីផ្លាស់ប្តូរការកំណត់សូមបិទបង្អួចដោយចុច "អនុវត្ត" ។
* ម៉ឺនុយជំនួយ
មាន "ជំនួយ S-Link" និង "អំពី" នៅក្នុងម៉ឺនុយជំនួយ។
"ជំនួយ S-Link" បង្ហាញការពិពណ៌នាអំពីមុខងារប៉ារ៉ាម៉ែត្រ។
“អំពី” បង្ហាញកំណែកម្មវិធី S-Link និងតំណទៅកាន់ Futaba webគេហទំព័រ។

© FUTABA CORPORATION
៩, ៩៧៧២ (២០១៩)
ឯកសារ/ធនធាន
 |
កម្មវិធី Futaba CIU-2 S-Link [pdf] សេចក្តីណែនាំ CIU-2, CIU-3, CIU-2 S-Link កម្មវិធី, កម្មវិធីភ្ជាប់, កម្មវិធី |