![]() ការណែនាំអំពីការដំឡើង
ការណែនាំអំពីការដំឡើង MCE100A,B
MCE100A,B
ឧបករណ៍បញ្ជាការបញ្ជូន PID
ការដាក់ពាក្យ
ឧបករណ៍បញ្ជា PID ផ្តល់នូវមធ្យោបាយនៃការគ្រប់គ្រងល្បឿន shaft ទិន្នផលនៃការបញ្ជូន hydrostatic ។
ដោយការប្រៀបធៀបល្បឿនម៉ូទ័រពិតប្រាកដធៀបនឹងពាក្យបញ្ជា setpoint និងប្រើសមាមាត្រ អាំងតេក្រាល និង de-rivative stages ដែលដំណើរការលើកំហុស ការត្រួតពិនិត្យត្រឹមត្រូវ និងឆ្លើយតបត្រូវបានសម្រេច។
កម្មវិធីដែលមិនមានលក្ខណៈធម្មតា ឧបករណ៍បញ្ជា PID រក្សាល្បឿនអ័ក្សទិន្នផលត្រឹមត្រូវនៅលើការបញ្ជូនអ៊ីដ្រូស្តាទិចដែលភ្ជាប់ជាមួយដ្រាយរំញ័រនៃម៉ាស៊ីនបង្រួមរមូរ។ កម្មវិធីផ្សេងទៀតរួមមានការគ្រប់គ្រងប្រេកង់ម៉ូទ័រ gen-erator ការគ្រប់គ្រងល្បឿនម៉ូទ័រសម្រាប់ប្រព័ន្ធធ្នឹម resonant ការគ្រប់គ្រងល្បឿនទៅមុខរបស់ crawler ឬការត្រួតពិនិត្យកម្លាំងបង្វិលសម្រាប់ស្នប់សម្ពាធ។
ស៊េរីនៃប៉ារ៉ាម៉ែត្រគឺប្រែប្រួលសម្រាប់កម្មវិធីនីមួយៗ។
MCE100A ដឹងពីល្បឿនទិន្នផលដោយប្រើជីពចរ ឬ adctachometerfeedback។ ចំពោះករណីដែលការឆ្លើយតបអតិបរមាចំពោះការផ្លាស់ប្តូរ RPM គឺចាំបាច់នោះ ឧបករណ៍បញ្ជា MC របស់ feedforward ក៏មានផងដែរ។
លក្ខណៈពិសេស
- ទប់ទល់នឹងស្ថានភាពរំញ័រ និងឆក់ឧបករណ៍ចល័ត
- សមាសធាតុអេឡិចត្រូនិចត្រូវបានជ្រើសរើស និងសាកល្បងសម្រាប់លក្ខខណ្ឌបរិស្ថានចល័ត
- បន្ទះសៀគ្វីបោះពុម្ពដែលស្រោបដោយថ្នាំកូតអនុលោមតាមអេឡិចត្រូនិចសម្រាប់ការពារសំណើម
- ការការពាររាងប៉ូលបញ្ច្រាស
- ការការពារសៀគ្វីខ្លី
- សន្ទះបិទបើកខ្លី + សំណនឹងមិនធ្វើឱ្យខូចឯកតាទេ។
- ការការពារការបាត់បង់មតិត្រឡប់សម្រាប់ការបើកឬខ្សែភ្លើងខ្លី
- រក្សាចំណុចកំណត់នៅពេលបាត់បង់ឧបករណ៍ចាប់សញ្ញាបញ្ជូនបន្ត
- Ramp stanub
លក្ខណៈបច្ចេកទេស
អគ្គិសនី
បញ្ចូលវ៉ុលTAGអ៊ីជួរ
11 ទៅ 16 Vdc (ម៉ូដែល 12 វ៉ុល)
20 ទៅ 28 Vdc (ម៉ូដែល 24 វ៉ុល)
ការផ្គត់ផ្គង់ចរន្ត (មិនរាប់បញ្ចូលបន្ទុកពេលជួល)
100 ma, អតិបរមា
វ៉ុលអូតូTAGE AT 4 VOLT TERMINAL (VR ±4 .4Vde
មតិយោបល់បញ្ចូល VOLTAGE
.5 - 20 វ៉ុល ពីកំពូលទៅកំពូល (ជីពចរឡើង)
0 -4 វ៉ុល dc (ការពារដល់ 16 Vdc) (dc tachome-ter)
ភាពមិនអនុគ្រោះនៃការបញ្ចូលមតិ
.01 pf ស្របជាមួយ 50 k Ω (pulse pickup) 40 k Ω (dc tachometer)
វដ្តកាតព្វកិច្ចរបស់មតិប្រតិកម្ម (PULSE PickUP)
30 - 70%
FEEDFORWARD បញ្ចូល VOLTAGE
.5 ទៅ 20 Vdc, ពីកំពូលទៅកំពូល (ជីពចរយក)
ជួរកែតម្រូវ FEEDFORWARD
425 Hz, អតិបរមា (ជីពចរយក)
100 Hz, អប្បបរមា (ជីពចរយក)
សម្រាប់ប្រេកង់មិនស្តង់ដារ សូមមើលព័ត៌មានការបញ្ជាទិញ
ផលប៉ះពាល់នៃការបញ្ចូល FEEDFORWARD
.01 microfarads ស្របគ្នាជាមួយ 50 គីឡូហឺត (ជីពចរភីកអាប់)
ការបញ្ចូលពាក្យបញ្ជាខាងក្រៅ VOLTAGអ៊ីជួរ
0 ទៅ 4 Vdc
ភាពមិនប្រក្រតីនៃការបញ្ចូលពាក្យបញ្ជាខាងក្រៅ
200 គីឡូម៉ែត្រ, អប្បបរមា
បញ្ចេញជួរបច្ចុប្បន្ន (ប្រភពបច្ចុប្បន្ន)
300 ma, អតិបរមា (V7058)
150 ma, អតិបរមា (MCV101A)
QUTPUT Load Resistance
10 ohms, អប្បបរមា
ចេញសេចក្តីណែនាំអំពីការផ្ទុក
.4 henries, អតិបរមា
ការលៃតម្រូវម៉ែត្របច្ចុប្បន្ន
450 ទៅ 800 មីក្រូamps នៅចំណុចកំណត់អតិបរមា
ប៉ូលបញ្ច្រាស
ធាតុបញ្ចូលថាមពល និងដីអាចត្រឡប់វិញបានដោយមិនមានការខូចខាតដល់ឧបករណ៍។
ការការពារសៀគ្វីខ្លី
ទិន្នផលសន្ទះបិទបើកនឹងទ្រទ្រង់រយៈពេលខ្លីមិនកំណត់
សៀគ្វីទៅដី។
ការការពារឆ្លងកាត់
លទ្ធផលនៃសន្ទះបិទបើកនឹងទ្រទ្រង់ការផ្លាស់ប្តូរអាំងឌុចស្យុងដែលតិចជាង 15 មីលីជូល។
បើកការការពារមតិ
150 mss, អតិបរមា
បានកំណត់ថាជាពេលវេលាពីការបាត់បង់មតិត្រឡប់ទៅសូន្យទិន្នផលបច្ចុប្បន្ន នៅពេលដំណើរការនៅ 50% នៃពាក្យបញ្ជាខ្នាតពេញ។ សម្រាប់តម្លៃមិនស្តង់ដារ សូមមើលព័ត៌មានការបញ្ជាទិញ។
បរិស្ថាន
សីតុណ្ហភាពប្រតិបត្តិការ
ពី -29 °ទៅ +66 ° C (-20 °ទៅ +150 ° F)
សីតុណ្ហភាពផ្ទុក
ពី -34 °ទៅ +66 ° C (-30 °ទៅ +150 ° F)
រំញ័រ
ទប់ទល់នឹងការធ្វើតេស្តរំញ័រដែលត្រូវបានរចនាឡើងសម្រាប់ការគ្រប់គ្រងឧបករណ៍ចល័តដែលមានពីរផ្នែក៖
- ជិះកង់ពី 5 ទៅ 2000 Hz ក្នុងអ័ក្សទាំងបី។
- Resonance រស់នៅសម្រាប់មួយលានវដ្តក្នុងអ័ក្សទាំងបី។
ចាប់ពី 1 ក្រាមដល់ 8 ក្រាម។ កម្រិតបង្កើនល្បឿនប្រែប្រួលទៅតាមប្រេកង់។
រន្ធត់
50 ក្រាមសម្រាប់ 11 មិល្លីវិនាទី។ ការឆក់ទាំងបីទិសទាំងសងខាងនៃអ័ក្សកាត់គ្នាទាំងបីសម្រាប់ការឆក់សរុបចំនួន 18 ។
សំណើម
បន្ទាប់ពីត្រូវបានដាក់ក្នុងបរិយាកាសគ្រប់គ្រងនៃសំណើម 95% នៅសីតុណ្ហភាព 38 ° C (100 ° F) រយៈពេល 10 ថ្ងៃ ឧបករណ៍បញ្ជានឹងដំណើរការក្នុងដែនកំណត់ជាក់លាក់។
ភ្លៀង
បន្ទាប់ពីត្រូវបានងូតទឹកពីគ្រប់ទិសទីដោយទុយោសម្ពាធខ្ពស់ចុះមក ឧបករណ៍បញ្ជានឹងដំណើរការក្នុងដែនកំណត់ជាក់លាក់។
ការសម្តែង
ការកំណត់ស្ថេរភាព
តិចជាង .5% នៃការកំណត់លើសពីជួរផ្គត់ផ្គង់ តិចជាង 2% នៃការកំណត់លើសពីជួរសីតុណ្ហភាព កំណត់ជាភាគរយនៃការប្រែប្រួលពីការកំណត់នៅក្នុងទិន្នផលរបស់រុក្ខជាតិនៅក្នុងការគ្រប់គ្រងរង្វិលជុំដែលមានស្ថេរភាព។
កម្រិតពាក្យបញ្ជា
30 ± 2%, 18 ± 2%, 10 ± 2%, 2.5%
កំណត់ជាភាគរយtage នៃមាត្រដ្ឋានពេញលេញសម្រាប់ការគ្រប់គ្រងរង្វិលជុំបិទទាបបំផុត។
បញ្ជា RAMP អត្រាឡើង
4.4 ± 8 វិនាទី,04±.2,25±.8,20±.8
បានកំណត់ថាជាពេលវេលាសម្រាប់សញ្ញាបញ្ចូលពាក្យបញ្ជាដើម្បីឈានដល់ 90% នៃមាត្រដ្ឋានពេញលេញ ជាមួយនឹងពាក្យបញ្ជាខាងក្នុង ឬខាងក្រៅកំណត់ជាមាត្រដ្ឋានពេញ។
DUAL RAMP អត្រាឡើង
.45 ± .07 វិនាទីដើម្បីឈានដល់ 40%
6.3 ± .6 វិនាទីដើម្បីឈានដល់ 90%
បានកំណត់ថាជាពេលវេលាសម្រាប់សញ្ញាបញ្ចូលពាក្យបញ្ជាដើម្បីឈានដល់ 90% នៃមាត្រដ្ឋានពេញលេញ ជាមួយនឹងពាក្យបញ្ជាខាងក្នុង ឬខាងក្រៅកំណត់ជាមាត្រដ្ឋានពេញ។
ភាពញឹកញាប់នៃការឆ្លើយតប
500 Hz, 1khz ± 1%, 1.1 khz ± 1%, 5 khz ± 1%,
3khz ± 1%, 1.65 khz ± 1%
កំណត់ដោយពាក្យបញ្ជាកំណត់ទៅអតិបរមា (+4 Vdc) និងជាមួយនឹងការគ្រប់គ្រងរង្វិលជុំបិទដែលមានស្ថេរភាព។ សម្រាប់ប្រេកង់មតិត្រឡប់មិនស្តង់ដារ សូមមើលព័ត៌មានការបញ្ជាទិញ។
មុំនៃដំណាក់កាលមតិ
41° ± 5° ដំណាក់កាលនាំមុខនៅម៉ូឌុល 2 Hz 0°±5°
បានកំណត់ថាជាដំណាក់កាលនាំមុខពីប្រេកង់ប្រែប្រួល sinusoidally របស់មតិត្រឡប់ទៅកាន់ធាតុបញ្ចូល។
ការផ្លាស់ប្តូរបច្ចុប្បន្ននៃការផ្ទុក FEEDFORWARD
100+ 5 ម៉ា
បានកំណត់ថាជាការផ្លាស់ប្តូររង្វិលជុំបើកចំហនៅក្នុងទិន្នផលបច្ចុប្បន្នផ្ទុកសម្រាប់ការផ្លាស់ប្តូរប្រេកង់បញ្ចូលពី 1 khz ទៅ 5khz ។ ការផ្លាស់ប្តូរមិនស្តង់ដារ សូមមើលព័ត៌មានការបញ្ជាទិញ។
ប្រាក់ចំណេញតាមសមាមាត្រ
.43 t0 3.5 ma/%
.27 t0 2.4 ma/%
.29 t0 2.4 ma/%
23210 2.0 ma/%
.11 ដល់ .85 ma/%
5 ទៅ 3.5 ma/%
.05 ដល់ .43 ma/%
បានកំណត់ថាជាអត្រាកើនឡើងនៅចុងទាប និងខ្ពស់នៃការកែតម្រូវការទទួលបានសមាមាត្រ។ សម្រាប់ការកំណត់ដែលមិនមែនជាស្តង់ដារ សូមមើលការបញ្ជាទិញព័ត៌មាន។
ពេលវេលារួមបញ្ចូលថេរ
ពី 100 ទៅ 300 msec, 100 ទៅ 1100 msec
សម្រាប់ការកំណត់មិនស្តង់ដារ សូមមើល Ordering Infor-mation។
ថេរវេលានៃដេរីវេ
ពី 0 ទៅ 550 mss
សម្រាប់ការកំណត់មិនស្តង់ដារ សូមមើល Ordering Infor-mation។
វិមាត្រ
សូមមើលរូបភាពទី 1 ។
ទ្រឹស្តីប្រតិបត្តិការ
សញ្ញាបញ្ជាខាងក្នុងឬខាងក្រៅសមាមាត្រទៅនឹងល្បឿនបញ្ជូនអ៊ីដ្រូស្តាទិចដែលចង់បានគឺបញ្ចូលទៅឧបករណ៍បញ្ជា MCE100 PID ។ សូមមើលរូបភាពទី 2 ។
សៀគ្វីម៉ាស៊ីនត្រជាក់ពាក្យបញ្ជាផ្តល់នូវ r យឺតamp ឡើង ដើម្បីការពារការបង្កើនល្បឿនចាប់ផ្តើមលើស និង r រហ័សamp ចុះក្រោមដើម្បីសុវត្ថិភាពក្នុងការឈប់ភ្លាមៗ។ កម្រិតដែនកំណត់ទាបត្រូវតែឆ្លងកាត់ មុនពេលសកម្មភាពត្រួតពិនិត្យណាមួយចាប់ផ្តើម។ ដែនកំណត់ល្បឿនទាបនេះត្រូវបានបង្កឡើងដោយឧបសគ្គដែលជាប់ទាក់ទងនឹងអត្រាជីពចរមតិត្រឡប់នៅក្នុងប្រព័ន្ធគ្រប់គ្រងរង្វិលជុំបិទដែលឆ្លើយតប និងដោយការបាត់បង់ការពិចារណាលើមតិកែលម្អ។
នៅពេលដែលពាក្យបញ្ជាលើសពីចំណុចចាប់ផ្ដើម វាត្រូវបានប្រៀបធៀបទៅនឹងសញ្ញាមតិត្រឡប់ពីការលើកជីពចរដំបូង។ សូមមើលរូបភាពទី 3. មតិត្រឡប់ត្រូវបានបំប្លែងពីប្រេកង់ទៅជាវ៉ុលឌីស៊ីtage ប្រសិនបើឧបករណ៍ចាប់សញ្ញាគឺជាការចាប់យកជីពចរ។ ប្រសិនបើ dc tachometer ត្រូវបានជំនួស នេះគឺមិនចាំបាច់ទេ។ បន្ទាប់ពីមតិត្រឡប់ត្រូវបានដកចេញពីពាក្យបញ្ជា សៀគ្វីបាត់បង់មតិត្រឡប់ត្រួតពិនិត្យលទ្ធផល។ ប្រសិនបើសញ្ញាមានបញ្ហាច្រើនលើសលប់មានក្នុងរយៈពេលយូរជាងនេះ (ការបាត់បង់សញ្ញាផ្តល់មតិត្រឡប់) ឧបករណ៍បញ្ជានឹងបិទ (នៅលើគ្រឿងខ្លះ)។ វដ្តបិទថាមពល និងបម្រុងទុកនឹងមានប្រសិទ្ធិភាពកំណត់ឡើងវិញ។
បន្ទាប់មកសញ្ញាកំហុសត្រូវបានបញ្ជូនទៅ PID stages.
របៀបកែដំបូង សមាមាត្រ (P) បង្កើនទិន្នផល cormective ក្នុងការឆ្លើយតបទៅនឹងទំហំនៃកំហុស – កំហុសកាន់តែធំ ការឆ្លើយតបកាន់តែធំ។ សមាមាត្រ stage អនុញ្ញាតឱ្យប្រព័ន្ធឆ្លើយតបស្ទើរតែភ្លាមៗចំពោះការផ្លាស់ប្តូរ។ វាដើរតួជាស៊េរីជាមួយប៉ារ៉ាឡែលនិង D stages ដូចដែលបានបង្ហាញក្នុងរូបភាពទី 2. របៀបកែតម្រូវទីពីរ អាំងតេក្រាល (I) បង្កើនទិន្នផលជាមួយនឹងអាំងតេក្រាលនៃពេលវេលា – កំហុសត្រូវបានបូកសរុបនៅពេលដែលពេលវេលាដើរទៅមុខ ហើយដោយការបន្ថែមសញ្ញាទាំងនេះបន្ថែមម៉ោង សូម្បីតែកំហុសតូចតាចក៏អាចត្រូវបានទទួលស្គាល់ និងកែតម្រូវបានដែរ។ ការគ្រប់គ្រងសូន្យ-droop ផ្តល់ឱ្យ។ របៀបកែតម្រូវទីបី ដេរីវេ (D) បង្កើនទិន្នផលជាមួយនឹង deriva-tive នៃពេលវេលា – ការផ្លាស់ប្តូរលឿនបង្កើតសញ្ញាកែតម្រូវធំ។ និស្សន្ទវត្ថុ stage បន្ថែមស្ថេរភាពដល់ប្រព័ន្ធភាគច្រើន។
feedforward stage គឺជាជម្រើសមួយសម្រាប់កម្មវិធីទាំងនោះដែលត្រូវការការឆ្លើយតបបន្ថែមទៀតនៅក្នុងប្រព័ន្ធរបស់ពួកគេ។
សូមមើលរូបភាពទី 4. ការចាប់យកជីពចរទីពីរនៅលើស្នប់បញ្ចូលស្នប់ ដឹងពីការផ្លាស់ប្តូរល្បឿននៃការបញ្ចូលបឋមនៃការផ្លាស់ប្តូរ មុនពេលពួកវាត្រូវបានឆ្លុះបញ្ចាំងនៅអ័ក្សទិន្នផលម៉ូទ័រ។ ជាថ្មីម្តងទៀត ទាំងឧបករណ៍ចាប់ជីពចរ ឬឧបករណ៍វាស់ស្ទង់ DC អាចត្រូវបានប្រើប្រាស់ ហើយកម្រិតចាប់ផ្ដើមទំនេរទាបត្រូវតែឆ្លងកាត់ មុនពេលសកម្មភាពកែតម្រូវចាប់ផ្តើម។
ដោយសារតែសញ្ញា feedforward ត្រូវបានបន្ថែម algebrai-cally ទៅ output stage, ឧបករណ៍ចាប់សញ្ញាដែលមានកំហុស ឬខ្សែដែលខូចនឹងមិនបញ្ឈប់សកម្មភាពគ្រប់គ្រងនោះទេ។ potenti-ometers ចំនួនពីរកំណត់សូន្យ និងវិសាលភាពនៃ feedforward ac-tion។
សញ្ញាទាំងបួនត្រូវបានបន្ថែមនៅក្នុង ssumming stage ដែលពួកវាត្រូវបានបំប្លែងទៅជាទិន្នផលបច្ចុប្បន្នទៅម៉ាស៊ីនបូមទឹក (V7058 ឬការគ្រប់គ្រងការផ្លាស់ទីលំនៅអគ្គិសនី)។ កម្រិតបច្ចុប្បន្នប្រែប្រួលដោយឧបករណ៍បញ្ជាដើម្បីរក្សាល្បឿនដែលចង់បានពីអ័ក្សទិន្នផលរបស់ម៉ូទ័រធារាសាស្ត្រ។ 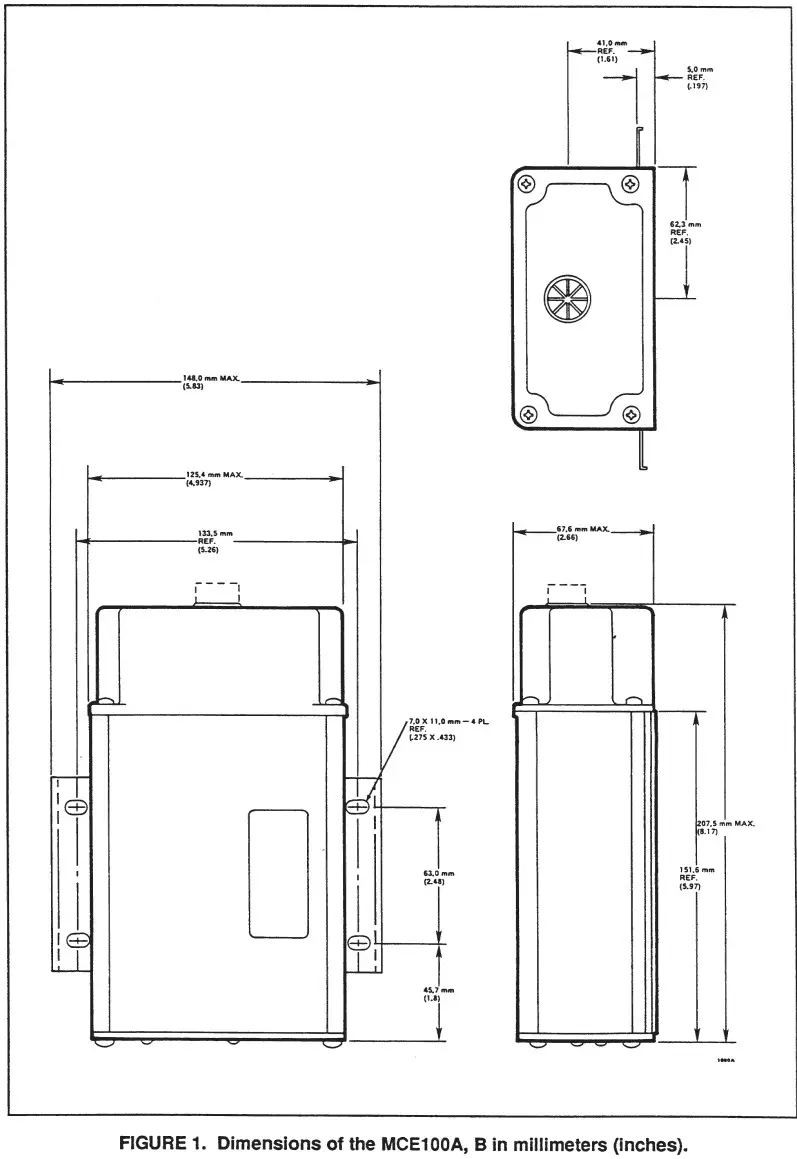

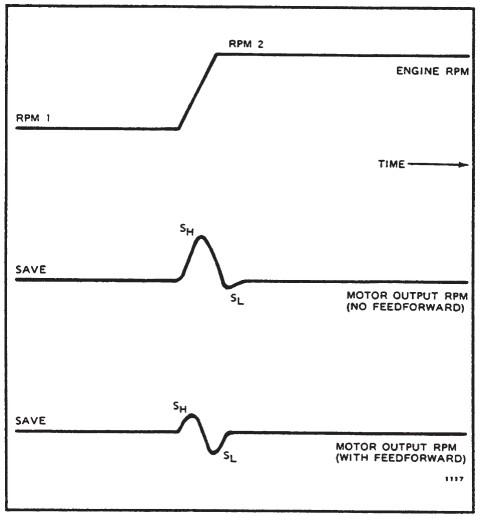 រូបភាពទី 4. ឥទ្ធិពលនៃ feedforward លើសកម្មភាពត្រួតពិនិត្យ។ Peaks S និង S មានមតិព័ត៌មានដូចគ្នា។ ampLitude និងតូចជាងមតិស្ថាបនាតែប៉ុណ្ណោះ។
រូបភាពទី 4. ឥទ្ធិពលនៃ feedforward លើសកម្មភាពត្រួតពិនិត្យ។ Peaks S និង S មានមតិព័ត៌មានដូចគ្នា។ ampLitude និងតូចជាងមតិស្ថាបនាតែប៉ុណ្ណោះ។
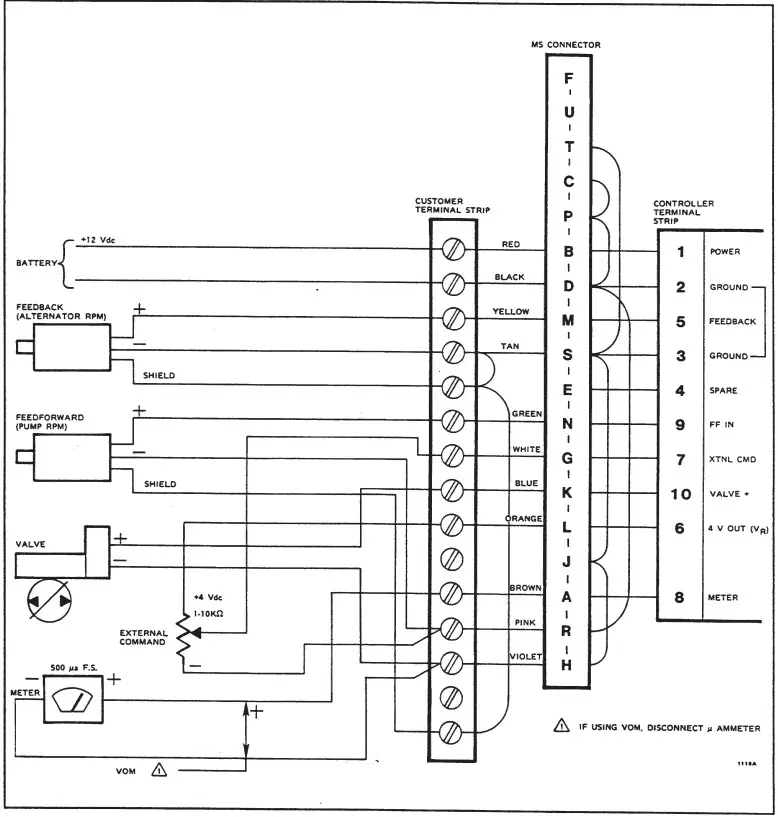
ខ្សែភ្លើង
រូបភាពទី 5 បង្ហាញពីការតភ្ជាប់ខ្សែធម្មតាសម្រាប់រង្វិលជុំត្រួតពិនិត្យ PID ។ ខ្សែដែលលាតសន្ធឹងពីឧបករណ៍បញ្ជាបញ្ចប់នៅក្នុងឧបករណ៍ភ្ជាប់ដែលភ្ជាប់ជាមួយឧបករណ៍ភ្ជាប់ MS ភេទស្រី លេខផ្នែក Bendix PT06-14-188S (ផ្នែកខាងឆ្វេងនៃឧបករណ៍ភ្ជាប់ ដូចដែលបានគូសបញ្ជាក់)។
ឧបករណ៍ភ្ជាប់ MS ភ្ជាប់ទៅនឹងខ្សែដែលមានកូដពណ៌ ដែលត្រូវបានបំភាយចូលទៅក្នុង termi-nalstrip ដែលផ្គត់ផ្គង់ដោយអតិថិជន។ ប្រសិនបើអតិថិជនជ្រើសរើសភ្ជាប់ដោយផ្ទាល់ទៅបន្ទះស្ថានីយនោះ ដៃគូទៅស្ថានីយគឺលេខ 4 spade lug ។
ឧបករណ៍ភ្ជាប់ខ្សែ/ឧបករណ៍ភ្ជាប់ខាងក្រោមអាចប្រើបាន។ សូមមើលរូបភាពទី 6 ។
- ខ្សែប្រវែងប្រាំមួយហ្វីតដែលមានឧបករណ៍ភ្ជាប់ MS ដែលបានបញ្ជាក់ខាងលើ។
- ខ្សែវ៉ាល់មួយខ្សែប្រវែងម្ភៃហ្វីតពីរជាមួយ ampឧបករណ៍ភ្ជាប់ henol 44-103-10002 និងមិត្តរួម។
- ខ្សែពីរខ្សែ Belden 9318 មួយខ្សែប្រវែងម្ភៃហ្វីត ការពារការបញ្ជូនបន្ត ឬខ្សែផ្តល់មតិត្រឡប់ ដោយមានគូស្ពតលេខ 6 មួយគូនៅលើចុងម្ខាង និងស្ថានីយរុញច្រានទំហំ 1/4 អ៊ីញមួយគូនៅម្ខាងទៀត។
ការដំឡើងបឋម
ការពិចារណាលើប្រព័ន្ធទាំងមូល
សម្រាប់ការគ្រប់គ្រងល្បឿនរង្វិលជុំបិទដែលមានស្ថេរភាព និងឆ្លើយតប លក្ខណៈនៃរង្វិលជុំបើកចំហនៃប្រព័ន្ធដែលនៅសល់គួរតែត្រូវបានធ្វើឱ្យប្រសើរជាមួយនឹងគំនិតសំខាន់ៗដូចខាងក្រោម។
- ប្រព័ន្ធត្រូវតែមានសមត្ថភាពបញ្ជូនចំណុចកំណត់ RPM ដែលបានជ្រើសរើសលើជួរពេញលេញនៃល្បឿនបញ្ចូលម៉ាស៊ីន និងបន្ទុកទិន្នផល។ សមាមាត្រទំហំបូមទៅម៉ូទ័រតូចបំផុតគួរតែត្រូវបានជ្រើសរើសដែលបំពេញតាមលក្ខណៈវិនិច្ឆ័យនេះ។
- បំពង់បូម / ម៉ូទ័រភ្ជាប់គ្នាគឺជាធាតុផ្ទុកថាមពល។ ប្រវែង និង/ឬអង្កត់ផ្ចិតហួសប្រមាណ បណ្តាលឱ្យមានរង្វិលជុំបើកចំហរមិនល្អ និងបាត់បង់ស្ថេរភាពនៅក្រោមការគ្រប់គ្រងរង្វិលជុំបិទជិត។ ដូច្នេះប្រវែងបំពង់មិនគួរលើសពីដប់ហ្វីតទេ ហើយខ្សែលើសពីបីហ្វីតមិនគួរលើសពីបីភាគបួនអ៊ីញក្នុងអង្កត់ផ្ចិតសម្រាប់ទុយោសម្ពាធខ្ពស់។ ខ្សែវែងអាចត្រូវការបំពង់រឹង។
- បំរែបំរួលនៃការផ្ទុកមិនគួរបណ្តាលឱ្យមានចលនាធំទូលាយនៅក្នុងកម្រិត RPM ម៉ាស៊ីនទេ។ អភិបាលម៉ាស៊ីន "ទន់" នឹងធ្វើឱ្យមានការឆ្លើយតបតិច និងមានស្ថេរភាពតិចតួច។
- ប្រេកង់ feedforward ស្តង់ដារពី Ppump pulse pickup គឺ 333 Hz នៅ 2000 RPM (10 tooth gear) ដែលគ្រប់គ្រងដោយឧបករណ៍បញ្ជាស្តង់ដារ។
ជួរប្រេកង់ផ្សេងទៀតអាចត្រូវបានដាក់ដូចជា 500 Hz ពីឧបករណ៍ flywheel ម៉ាស៊ីន។
ការទទួលយកជីពចរ voltages:
500 MV ឡើងដល់កំពូលអប្បបរមា,
វ៉ុលកំពូល 20 វ៉ុលដល់កំពូលអតិបរមា។ - សញ្ញាដ្រាយពីឧបករណ៍បញ្ជាដែលចាំបាច់សម្រាប់ដំណើរការល្អបំផុតគឺអាស្រ័យលើប្រភេទនៃស្នប់ដែលប្រើ។
- ឧបករណ៍បញ្ជាមានសម្រាប់ប្រព័ន្ធ 12 ឬ 24 Vdc ។
- ដោយសារតែសមត្ថភាពផ្ទុកថាមពលរបស់ពួកគេ តម្រងសម្ពាធនៅក្នុងផ្នែកខ្ពស់នៃរង្វិលជុំអ៊ីដ្រូស្តាទិចគឺរំខានដល់ការគ្រប់គ្រងដំណើរការ។
- ការរួមបញ្ចូលគ្នានៃស្នប់ និងម៉ូទ័រទាំងអស់អាចត្រូវបានបំពាក់ជាមួយនឹងការគ្រប់គ្រងល្បឿន។ ទោះយ៉ាងណាក៏ដោយ ការកំណត់ប៉ារ៉ាម៉ែត្រល្អប្រសើរបំផុតនឹងប្រែប្រួលទៅតាមការរួមបញ្ចូលគ្នានីមួយៗ ក៏ដូចជាការគ្រប់គ្រងដំណើរការផងដែរ។
 រូបភាពទី 5. ការភ្ជាប់ខ្សែទៅនឹងឧបករណ៍បញ្ជា។ ខ្សែទាំងអស់មានចុងម្ខាងដោយគ្មានការបញ្ចប់; អ្នកប្រើប្រាស់កាត់ប្រវែង និងបញ្ចប់។
រូបភាពទី 5. ការភ្ជាប់ខ្សែទៅនឹងឧបករណ៍បញ្ជា។ ខ្សែទាំងអស់មានចុងម្ខាងដោយគ្មានការបញ្ចប់; អ្នកប្រើប្រាស់កាត់ប្រវែង និងបញ្ចប់។ 
នីតិវិធីកែតម្រូវ
នៅពេលដែលស្គាល់កម្មវិធីរបស់អ្នកប្រើហើយ ឧបករណ៍បញ្ជា PID អាចត្រូវបានដឹកជញ្ជូនទៅរោងចក្រជាមួយនឹងការកំណត់ potentiometer ស្តង់ដារ។ ប្រសិនបើកម្មវិធីថ្មី ឬប្រសិនបើការកំណត់ត្រូវការការកែតម្រូវឡើងវិញដោយសារតែការពាក់នៅក្នុងការបញ្ជូនសន្ទនីយស្តាទិច ទុយោ វ៉ាល់បញ្ជា។ល។ នីតិវិធីដែលបានរាយខាងក្រោមគួរតែត្រូវបានអនុវត្តតាម ដើម្បីបង្កើនប្រសិទ្ធភាពឧបករណ៍បញ្ជា។ proce-dure សន្មត់ថាអ្នកប្រើប្រាស់មាន voltmeter ឬ oscilloscope ភ្ជាប់ជាមួយ controller ដើម្បីតាមដានការឆ្លើយតបរបស់ sys-tem។
នៅពេលធ្វើការផ្លាស់ប្តូរការទទួលបាន និងការធ្វើតេស្តសម្រាប់ស្ថេរភាព itis បានផ្តល់អនុសាសន៍ថាការកែតម្រូវតិចតួចត្រូវបានធ្វើឡើងមុនពេលធ្វើឱ្យប្រព័ន្ធរំខាន និងសង្កេតមើលពីរបៀបដែលវាងើបឡើងវិញ។ ប្រព័ន្ធ Asthe ខិតទៅជិតអស្ថិរភាពវានឹងមានទំនោរទៅ "រោទ៍" បន្តិចមុនពេលដោះស្រាយ។ វាជួយកំណត់អត្តសញ្ញាណនៅពេលដែលអស្ថិរភាពកំពុងត្រូវបានខិតជិត និងកាត់បន្ថយឱកាសនៃកម្រិតអស្ថិរភាពដ៏គ្រោះថ្នាក់ដែលអាចបំផ្លាញឧបករណ៍។
- ជាមួយនឹងប្រព័ន្ធបានភ្ជាប់យ៉ាងពេញលេញ ដោះគម្របរបស់ឧបករណ៍បញ្ជាចេញ ហើយកំណត់ទីតាំងជួរនៃប្រដាប់វាស់ថាមពលនៅលើបន្ទះមេ និងកាត់ផ្នែកបញ្ជូនបន្តនៅលើបន្ទះទីពីរ (ប្រសិនបើប្រើ)។ ពួកវាមានទីតាំងនៅជិតគម្របផ្លាស្ទិច។ សូមមើលរូបភាពទី 7 ។
 រូបភាពទី 7. ទីតាំងនៃ setpoint trim poten-tiometers នៅលើបន្ទះសៀគ្វីបោះពុម្ពសំខាន់របស់ Controller ។
រូបភាពទី 7. ទីតាំងនៃ setpoint trim poten-tiometers នៅលើបន្ទះសៀគ្វីបោះពុម្ពសំខាន់របស់ Controller ។ - ភ្ជាប់ voltmeter ពីស្ថានីយ 8 ទៅដី។ microammeter អាចត្រូវបានជំនួសសម្រាប់ VOM ។ ផ្តាច់ microammeter ប្រសិនបើប្រើ VOM ។
- លៃតម្រូវចំណុចកំណត់ខាងក្នុងច្រាសទ្រនិចនាឡិការហូតដល់ការចុចបន្តិចត្រូវបានឮ ដែលបង្ហាញពីចំណុចកំណត់អប្បបរមា។ បន្ទាប់មកលៃតម្រូវការកំណត់តាមទ្រនិចនាឡិកា (បង្កើនល្បឿន) ដើម្បីនាំប្រព័ន្ធទៅល្បឿនដែលចង់បាន។ potenti-ometer នឹងតម្រូវឱ្យមានការបត់ជាច្រើនដងដើម្បីឱ្យលើសកម្រិតកំណត់ ហើយមកដល់ល្បឿនត្រឹមត្រូវ។ ចំណុចកំណត់ខាងក្រៅនឹងត្រូវបានដំណើរការស្រដៀងគ្នា។
- កំណត់ P potentiometer 90° តាមទ្រនិចនាឡិកាពីអប្បបរមា; កំណត់ | ទីតាំងកណ្តាល។ កំណត់ D ទៅចំណុចកណ្តាលរបស់វា ដែលបង្ហាញក្នុងរូបភាពទី 8 ។ នៅលើបន្ទះសៀគ្វី feedfor-ward កំណត់ការកើនឡើង និងសូន្យ potenti-ometers ទៅចំណុចកណ្តាលរបស់ពួកគេ។
- កំណត់ម៉ាស៊ីននៅ RPM អតិបរមា។
 រូបភាពទី 8. ជួរលៃតម្រូវនៃ potentiometers កំណត់ P, I, D និង M ។
រូបភាពទី 8. ជួរលៃតម្រូវនៃ potentiometers កំណត់ P, I, D និង M ។ - អនុវត្តថាមពលទៅឧបករណ៍បញ្ជា។ ប្រសិនបើប្រព័ន្ធចាប់ផ្តើមញ័រ ដូចដែលបានបង្ហាញដោយ vi-bration ធ្ងន់ធ្ងរនៅក្នុងការបញ្ជូនអ៊ីដ្រូស្តាទិច សូមបិទថាមពលទៅឧបករណ៍បញ្ជា។
- ប្រសិនបើប្រព័ន្ធលំយោល ហើយបន្ទុកដែលជំរុញគឺធំ និងនិចលភាព សូមបង្វែរការកំណត់ D តាមទ្រនិចនាឡិកា។ ប្រសិនបើប្រព័ន្ធយោល ហើយបន្ទុកមិនធំ នោះវាច្រាសទ្រនិចនាឡិកា។ បន្តកែតម្រូវការកំណត់ D រហូតដល់ចំណុចដែលសម្រេចបានស្ថេរភាព។ ប្រសិនបើប្រព័ន្ធមានចលនានៅគ្រប់ការកំណត់ទាំងអស់ យល់ព្រមជាមួយ Danfoss ។
- បង្កើនការកើនឡើង P រហូតដល់ប្រព័ន្ធចាប់ផ្តើមមិនស្ថិតស្ថេរ ឬឈានដល់អតិបរមា។ បន្ទាប់មកបន្ថយការទទួលបានដោយ 1/3 នៃចម្ងាយពីចុងច្រាសទ្រនិចនាឡិកា។
- បង្កើនការទទួលបាន l រហូតដល់ប្រព័ន្ធចាប់ផ្តើមមិនស្ថិតស្ថេរ ឬឈានដល់អតិបរមា។ បន្ទាប់មកបន្ថយការទទួលបានដោយ 1/3 នៃចម្ងាយពីចុងច្រាសទ្រនិចនាឡិកា។
- កែតម្រូវឡើងវិញនូវ D gainbyvarying ទៅអស្ថិរភាពក្នុងទិសដៅណាមួយ ហើយបន្ទាប់មកកំណត់ឡើងវិញនៅពាក់កណ្តាលរវាងចំនុចអស្ថិរភាពទាំងនេះ។
- កែតម្រូវការកើនឡើង P ឡើងវិញដោយបង្កើនវាទៅ insta-bility ហើយបន្ទាប់មកថយក្រោយពីការកំណត់នេះដោយ 1/3 នៃចម្ងាយពីចុងច្រាសទ្រនិចនាឡិកា។
- ការកែតម្រូវ Feedforward៖
ក) កំណត់ការទទួលបាន Feedforward ទៅទីតាំងកណ្តាល។
ខ) កំណត់ពីសូន្យទៅទីតាំងកណ្តាល។
គ) ចាប់ផ្តើម និងកំណត់ម៉ាស៊ីនទៅពាក់កណ្តាល RPM ។
ឃ) ចាប់ផ្តើមការត្រួតពិនិត្យ PID ពេញលេញនៅប្រហែល 25% នៃល្បឿនដែលបានវាយតម្លៃនៅម៉ាស៊ីនពេញ។
ង) ដី (ឬបើក) ការចាប់យកជីពចរ Feedforward ។
f) នៅពេលដែលដី Feedforward PPU ត្រូវបានផ្លាស់ទីឡើងវិញ សន្ទះបិទបើក + (PID terminal 10) នឹងកាត់បន្ថយមួយភ្លែត (សម្រាប់តិចជាង 1 វិនាទី)។ នេះក៏អាចត្រូវបានគេសង្កេតឃើញដោយការធ្លាក់ចុះ mo-mentary នៅក្នុង RPM កំណត់។ កែសម្រួល Feedforward ZERO រហូតដល់វ៉ុលមួយភ្លែតtage (ល្បឿន) ធ្លាក់ចុះបង្ហាញនៅពេលដែល Feed-forward PPU ត្រូវបានបើកឡើងវិញ។
g) ធ្វើការផ្លាស់ប្តូរជំហានមួយ (ឧ.
សង្កេតមើលគម្លាតនៃល្បឿនទិន្នផល នៅពេលម៉ាស៊ីនដំណើរការ។ ប្រសិនបើល្បឿនទិន្នផលអ៊ីដ្រូស្តាទិចដែលបានគ្រប់គ្រងកើនឡើងច្រើននៅពេលដែលម៉ាស៊ីនដំណើរការ បង្កើនការទទួលបាន Feedforward ។ ផ្ទុយទៅវិញ ប្រសិនបើល្បឿនទិន្នផលថយចុះភ្លាមៗ នោះកាត់បន្ថយការទទួលបាន Feedforward។
h) ប្រហែលជាមានការបាញ់ច្រើនក្នុងអំឡុងពេលម៉ាស៊ីនដំណើរការដូចបង្ហាញក្នុងរូបភាពទី 4 ការកែតម្រូវ P, I, និង D នៅក្នុងបន្ទះ PID មេក៏អាចមានភាពខុសប្លែកគ្នាផងដែរ ដើម្បីមានឥទ្ធិពលលើគម្លាតល្បឿនតិចបំផុត នៅពេលដែលម៉ាស៊ីនដំណើរការ។ - ប្រសិនបើ microammeter s ត្រូវបានដំឡើងជាអចិន្ត្រៃយ៍ នោះ mneter potentiometer (M) អាចត្រូវបានប្រើប្រាស់សម្រាប់ការក្រិត។ Ata ល្បឿនទិន្នផលដែលគេស្គាល់ (ផ្ទៀងផ្ទាត់ដោយ stroboscope, oscilloscope, ta-chometer ឬផ្សេងទៀត) លៃតម្រូវម៉ែត្រ potenti-ometer សម្រាប់ការអាន microammeter ត្រឹមត្រូវ។
ការដោះស្រាយបញ្ហា
ប្រសិនបើរង្វិលជុំគ្រប់គ្រងល្បឿនមិនបានរក្សាល្បឿនឱ្យបានត្រឹមត្រូវ សមាសធាតុណាមួយរបស់វាអាចមានបញ្ហា។
តារាង A ផ្តល់នូវមធ្យោបាយនៃការធ្វើរោគវិនិច្ឆ័យការបរាជ័យទាំងនេះ។ ប្រសិនបើនីតិវិធីមិនអាចដោះស្រាយបញ្ហាបាន សូមពិគ្រោះជាមួយ Danfoss។ ForPID Controllers ដែលត្រូវការការជួសជុល សូមមើលព័ត៌មានការបញ្ជាទិញ។
តារាង ក. នីតិវិធីដោះស្រាយបញ្ហាសម្រាប់ការបរាជ័យក្នុងរង្វង់ត្រួតពិនិត្យ PID ។ រោគសញ្ញានៅខាងឆ្វេង ហើយតំបន់ដែលត្រូវពិនិត្យគឺនៅខាងលើ។ តំបន់គួរតែត្រូវបានពិនិត្យតាមលំដាប់លេខដែលបានបង្ហាញ (le, ពិនិត្យ "1"s ដំបូង, "2"s ទីពីរ។ល។)
| មតិប្រតិកម្ម PPU កំហុស |
ខាងក្រៅ កំហុស CIAO |
កំហុសថាមពល | វ៉ាល់ កំហុស |
ម៉ាស៊ីន RPM |
ការផ្តល់ចំណី PPU |
||||||||
| បើក/ ខ្លី |
INT |
បើក/ខ្លី | INT |
បើក | ទាប ឬ INT | បើក/ខ្លី | INT |
ទាប | បើក/ ខ្លី |
INT | |||
| 1. | នឹងមិនបើកប្រព័ន្ធទាល់តែសោះ | 1 | 1 | 1 | |||||||||
| 2. | ម៉ូទ័រចាប់ផ្តើមបង្វិល បន្ទាប់មកបិទ | 1 | 2 | 3 | 1 | 2 | 1 | 2 | 2 | 2 | |||
| 3. | ប្រព័ន្ធស្វែងរកច្រើនហួសហេតុ មិនមែនតាមកាលកំណត់ | 1 | 1 | 1 | 1 | 1 | |||||||
| 4. | ប្រព័ន្ធដំណើរការមិនអីទេ បន្ទាប់មកបិទ ឬបង្កើនល្បឿន បន្ទាប់មកបិទ | 1 | 1 | 1 | 1 | ||||||||
| 5. | ប្រព័ន្ធដំណើរការពេញល្បឿន | 1 | |||||||||||
| 6. | មិនអាចកំណត់ល្បឿនពេញបានទេ។ | 2 | 2 | 1 | 1 | 2 | |||||||
| 7. | ការឆ្លើយតបមិនល្អចំពោះការផ្លាស់ប្តូរ RPM | 1 | 2 | ||||||||||
| E. | មិនអាចធ្វើឱ្យប្រព័ន្ធមានស្ថេរភាព (ដំណើរការជារង្វង់) | 3 | 5 | 4 | 4 | 3 | |||||||
| 9. | ម៉ាស៊ីន RPM និងប្រព័ន្ធទាំងពីរ OSCILLATE | ||||||||||||
| ០១. | ការឆ្លើយតបមិនល្អក្នុងការផ្ទុកការផ្លាស់ប្តូរ | ||||||||||||
| ០១. | ការអានម៉ែត្រមិនដំណើរការទេ (ដឹងថា 1ACROA1AMETER មិនអីទេ) | ||||||||||||
![]() INT អាចមានការតភ្ជាប់បណ្ដោះអាសន្ននៅលើខ្សែ ឬ MARGINAL VOLTAGបិទឧបករណ៍ចាប់សញ្ញា
INT អាចមានការតភ្ជាប់បណ្ដោះអាសន្ននៅលើខ្សែ ឬ MARGINAL VOLTAGបិទឧបករណ៍ចាប់សញ្ញា
![]() កំហុសដី (បើក)
កំហុសដី (បើក)
![]() ខ្លីទៅប្រភពថាមពល
ខ្លីទៅប្រភពថាមពល
![]() ស្ថេរភាពប្រព័ន្ធក៏រងផលប៉ះពាល់ដោយអ្នកគ្រប់គ្រងម៉ាស៊ីនដែរ
ស្ថេរភាពប្រព័ន្ធក៏រងផលប៉ះពាល់ដោយអ្នកគ្រប់គ្រងម៉ាស៊ីនដែរ
| ម៉ែត្រចេញ | INT ឬ EXT CMD |
អ៊ីម ត្រឹមត្រូវ។ P,I,D ADJ |
ការផ្តល់ចំណី ទទួលបាន |
ទុយោ។ ឡេន។ ឌីអេ។ |
||||
| បើក/ ខ្លី |
INT | ទាប | ថូ ខ្ពស់ |
ទាប | ខ្ពស់ | ពេក។ | ||
| 1. នឹងមិនបើកប្រព័ន្ធទាល់តែសោះ | 1 | |||||||
| 2. ម៉ូទ័រចាប់ផ្តើមបង្វិល បន្ទាប់មកបិទ | ||||||||
| 3. ប្រព័ន្ធស្វែងរកច្រើនហួសហេតុ មិនមែនតាមកាលកំណត់ | ||||||||
| 4. ប្រព័ន្ធដំណើរការយល់ព្រម។ បន្ទាប់មកបិទ ឬបង្កើនល្បឿន បន្ទាប់មកបិទ | ||||||||
| 5. ប្រព័ន្ធដំណើរការពេញល្បឿន | 1 | |||||||
| 6. មិនអាចកំណត់ល្បឿនពេញបានទេ។ | ||||||||
| 7. ការឆ្លើយតបមិនល្អចំពោះការផ្លាស់ប្តូរ RPM | 2 | |||||||
| 8. មិនអាចធ្វើឱ្យប្រព័ន្ធមានស្ថេរភាព (ដំណើរការជារង្វង់) | 1 | 2 | 1 | |||||
| 9. ម៉ាស៊ីន RPM និងប្រព័ន្ធទាំងពីរ OSCILLATE | 2.4 | 1.4 | ||||||
| 10. ការឆ្លើយតបមិនល្អក្នុងការផ្ទុកការផ្លាស់ប្តូរ | 1 | 1 | ||||||
| 11. ម៉ែត្រអានមិនដំណើរការ (ដឹង MCROAIAMET ER 5 OK) | 1 | 2 | ||||||
តារាង ខ. ឯកតាស្តង់ដារ MCE100 ។
| ប្រព័ន្ធប្រតិបត្តិការ NUMBER | ថាមពល | កំណត់គោលដៅ | មតិយោបល់ | ចំណី | RAMP | ចេញ | ឧបករណ៍ភ្ជាប់ | ការបាត់បង់ |
| វ៉ុល DC | KILOHERTZ | ទៅមុខ • | មតិយោបល់ | |||||
| MCE100A1018 | 14 | ផ្ទៃក្នុង | 1 | គ្មាន | នៅលីវ | W058 | TERM STRIP | បាទ |
| MCE100A1026 | 14 | ខាងក្រៅ | 1 | គ្មាន | ទ្វេ | W058 | TERM STRIP | បាទ |
| MCE100A1042 | 14 | ខាងក្រៅ | 5 | គ្មាន | នៅលីវ | វី៣៥ | TERM STRIP | បាទ |
| MCE100A1059 | 14 | ខាងក្រៅ | 1 | គ្មាន | នៅលីវ | W058 | TERM STRIP | បាទ |
| MCE100A1067 | 28 | ផ្ទៃក្នុង | 4 | គ្មាន | នៅលីវ | W058 | MS | បាទ |
| MCE100A1075 | 28 | ផ្ទៃក្នុង | គ្មាន | នៅលីវ | អគ្គិសនីកម្ពុជា | MS | បាទ | |
| MCE100A1084 | 28 | ផ្ទៃក្នុង | 900 HETRZ | គ្មាន | នៅលីវ | អគ្គិសនីកម្ពុជា | TERM STRIP | ទេ |
| MCE100A1091 | 14 | ផ្ទៃក្នុង | 1 | គ្មាន | នៅលីវ | អគ្គិសនីកម្ពុជា | MS | ទេ |
| MCE100A1109 | 14 | ផ្ទៃក្នុង | .025 – 1 | គ្មាន | នៅលីវ | អគ្គិសនីកម្ពុជា | MS | ទេ |
| MCE100A1117 | 14 | ខាងក្រៅ | 1 | គ្មាន | នៅលីវ | អគ្គិសនីកម្ពុជា | TERM STRIP | ទេ |
| MCE100A1125 | 28 | ផ្ទៃក្នុង | 900 HERTZ | គ្មាន | នៅលីវ | អគ្គិសនីកម្ពុជា | MS | ទេ |
| MCE100A1133 | 14 | ខាងក្រៅ | 1 | គ្មាន | ៣០ ឃ | អគ្គិសនីកម្ពុជា | TERM STRIP | ទេ |
| MCE100A1141 | 14 | ខាងក្រៅ | 3 | គ្មាន | នៅលីវ | អគ្គិសនីកម្ពុជា | TERM STRIP | ទេ |
| MCE100A1156 | 14 | ខាងក្រៅ | 1.65 | គ្មាន | ៣០ ឃ | អគ្គិសនីកម្ពុជា | TERM STRIP | ទេ |
| MCE100A1166 | 14 | ខាងក្រៅ | 500 HERTZ | គ្មាន | នៅលីវ | អគ្គិសនីកម្ពុជា | TERM STRIP | ទេ |
| MCE100B1009 | 14 | ផ្ទៃក្នុង | 1 | 425 HERTZ | នៅលីវ | W058 | TERM STRIP | បាទ |
| MCE100B1017 | 14 | ផ្ទៃក្នុង | 900 HERTZ | 425 HERTZ | នៅលីវ | W058 | MS | បាទ |
| MCE100131025 | 14 | ផ្ទៃក្នុង | 900 HERTZ | 425 HERTZ | នៅលីវ | អគ្គិសនីកម្ពុជា | MS | បាទ |
| MCE100B1033 | 14 | 900 HZ INT | 1 | 1KHZ-5KHZ | នៅលីវ | អគ្គិសនីកម្ពុជា | MS | បាទ |
| MCE100B1058 | 14 | ផ្ទៃក្នុង | 900 HERTZ | 1KHZ | នៅលីវ | អគ្គិសនីកម្ពុជា | MS | បាទ |
* អតិបរមា Hz ។ អប្បបរមា Hz = 20% នៃអតិបរមា។
ព័ត៌មានបញ្ជាទិញ
ឧបករណ៍បញ្ជា MCE100A, B PID ត្រូវបានរចនាឡើង 1o ត្រូវបានប្ដូរតាមបំណង តាមរយៈការកំណត់ការទទួលបានជាជម្រើស លក្ខណៈពិសេសបន្ថែម និងសៀគ្វីសមាសធាតុបន្ថែម ទៅតាមតម្រូវការរបស់អ្នកប្រើប្រាស់នីមួយៗ។ លក្ខណៈជាក់លាក់ដែលបានរាយបញ្ជីគឺសម្រាប់ “ឧបករណ៍បញ្ជា™ស្តង់ដារ ប៉ុន្តែជាធម្មតាពួកវាអាចត្រូវបានកែប្រែដើម្បីឱ្យសមនឹងតម្រូវការអ្នកប្រើប្រាស់ម្នាក់ៗ។
ពិគ្រោះ….Danfoss…..សម្រាប់ការប្ដូរតាមបំណងទាំងនេះ។ សូមមើលតារាង B សម្រាប់ឯកតាស្តង់ដារ។
សេវាអតិថិជន
អាមេរិកខាងជើង
បញ្ជាទិញពី
ក្រុមហ៊ុន Danfoss (សហរដ្ឋអាមេរិក)
នាយកដ្ឋានសេវាកម្មអតិថិជន
3500 Annapolis Lane ខាងជើង
Minneapolis រដ្ឋ Minnesota 55447
ទូរស័ព្ទ៖ (៩១៧) ៨៦៣-៧១០៥
ទូរសារ៖ (763) 559-0108
ជួសជុលឧបករណ៍
សម្រាប់ឧបករណ៍ដែលត្រូវការការជួសជុល រួមបញ្ចូលការពិពណ៌នាអំពីបញ្ហា ច្បាប់ចម្លងនៃការបញ្ជាទិញ និងឈ្មោះ អាសយដ្ឋាន និងលេខទូរស័ព្ទរបស់អ្នក។
ត្រឡប់ទៅ
ក្រុមហ៊ុន Danfoss (សហរដ្ឋអាមេរិក)
នាយកដ្ឋានប្រគល់ទំនិញ
3500 Annapolis Lane ខាងជើង
Minneapolis រដ្ឋ Minnesota 55447
អឺរ៉ុប
បញ្ជាទិញពី
Danfoss (Neumiinster) GmbH & Co.
នាយកដ្ឋានចូលបញ្ជា
ក្រកamp 35
Postfach ១៥០១
D-24531 Neuminster
អាល្លឺម៉ង់
ទូរស័ព្ទ៖ ៣១៦-៨០០-៦៩៥
ទូរសារ៖ ០០៨៦-៥១៩-៨៦-៣២៤១៧៩៦
| ជាក់លាក់ | ស្តង់ដារ | ជម្រើស |
| ការផ្គត់ផ្គង់ Vottage | 12 វិដិកា | 24 វិដិកា |
| បញ្ជា | ផ្ទៃក្នុង | ខាងក្រៅ |
| មតិកែលម្អ | Pulse Pickup | ឌីស៊ី ថាច |
| ជីពចរអតិបរមា មកយក មតិកែលម្អ ប្រេកង់ |
1 kHz | អថេរ |
| Feedforward | ទេ | បាទ |
| ជីពចរអតិបរមា មកយក Feedforward ប្រេកង់ |
1 kHz ទៅ 5 kHz | អថេរ (450 Hz, 1 kHz) |
| ទិន្នផល Stage | វី៣៥ | អគ្គិសនីកម្ពុជា |
| បញ្ជា Ramp ពេលវេលា (90% នៃមាត្រដ្ឋានពេញលេញ) |
4.4 វិ | អថេរ |
| Ramp ប្រភេទ | នៅលីវ | ទ្វេ |
| ឧបករណ៍ភ្ជាប់ | ស្ថានីយវីស | ឧបករណ៍ភ្ជាប់ MS ឬ Packard |
| ខាលីង | គ្មាន | មតិត្រឡប់, មតិត្រឡប់, វ៉ាល់, ឧបករណ៍បញ្ជាមេ |
![]()
ឯកសារ/ធនធាន
 |
Danfoss MCE100A PID ឧបករណ៍បញ្ជាការបញ្ជូន [pdf] ការណែនាំអំពីការដំឡើង MCE100A PID Transmission Controller, MCE100A, PID Transmission Controller, Transmission Controller |