![]() אוטומציה GT200-MT-CO Modbus TCP Canopen Gateway
אוטומציה GT200-MT-CO Modbus TCP Canopen Gateway
מדריך למשתמש
מידע חשוב
אַזהָרָה
הנתונים והאקסampלא ניתן להעתיק קטעים במדריך זה ללא אישור. SST Automation שומרת לעצמה את הזכות לשדרג את המוצר מבלי להודיע למשתמשים.
למוצר יש יישומים רבים. על המשתמשים לוודא שכל הפעולות והתוצאות תואמות לבטיחות התחומים הרלוונטיים והבטיחות כוללת חוקים, כללים, קודים ותקנים.
זְכוּת יְוֹצרִים
זכויות יוצרים © 2023 מאת SST Automation Co., Ltd. כל הזכויות שמורות.
סִימָן מִסחָרִי
![]() הוא הסימן המסחרי הרשום של SST Automation.
הוא הסימן המסחרי הרשום של SST Automation.
מידע ליצירת קשר עם תמיכה טכנית www.sstautomation.com
www.sstcomm.com אֶלֶקטרוֹנִי: support@sstautomation.com
המוצר נגמרview
1.1 פונקציית המוצר
השער תומך בחיבור התקני CANopen לרשת Modbus TCP, הוא יכול לממש תקשורת נתונים בין התקני CANopen מרובים ומספר לקוחות Modbus TCP.
1.2 תכונת המוצר
- תומך בערוץ אחד CAN 2.0A.
- ממשק CAN: בידוד פוטואלקטרי 3KV.
- פועל כ-CAN open Master, תומך ב-100 PDO ו-100 פקודות SDO.
- תומך בעד 8 לקוחות Modbus TCP.
- תומך 2 ערוצים, יציאת רשת 10M/100M..
1.3 מפרט טכני
[1] ממשק Ethernet:
- תומך ב-2 יציאות רשת של 10M/100M (ניהול משא ומתן אוטומטי) עם מתג מובנה.
- תומך בפרוטוקול Modbus TCP ומתפקד כשרת Modbus TCP.
- תומך בחיבור של עד 8 לקוחות Modbus TCP.
- תומך בקודי פונקציות: 03H, 04H, 06H, 10H.
- כתובת ההתחלה של אוגר הקלט היא 0 (מאחסן את מסגרת ה-CAN שהתקבלה), ותומכת בקוד הפונקציה 04H.
- כתובת ההתחלה של אוגר הפלט היא 0 (מאחסן את מסגרות ה-CAN שצריך לשלוח), ותומכת בקודי הפונקציות 03H, 06H ו-16H.
- תומך בקוד פונקציה 03 או 04 לקריאת אזור נתוני הקלט/פלט.
- תומך בתצורה סטטית של כתובת IP ו-DHCP.
[2] קצב תקשורת: קצב העברת CAN: 10kbit/s, 20kbit/s, 50kbit/s, 100kbit/s, 125kbit/s, 250kbit/s, 500kbit/s, 1Mbps.
[3] ממשק CAN תומך בפרוטוקול CAN2.0A.
[4] DS-301 V4.02 ו- CiA Draft Recommendation 303 תואם. - תומך מקסימום 8 בתים TPDO ו-RPDO.
- תומך במקסימום 100 פקודות PDO ומקסימום 100 פקודות SDO.
- תומך בהורדה מהירה SDO והעלאה מהירה SDO.
- ניתן להגדיר את ה-COB-ID של TPDO ו-RPDO על ידי המשתמש, או שניתן להשתמש ב-COBID ברירת המחדל.
- תומך ב-Clear Data Time עבור פונקציית TPDO.
- תומך בפונקציית זמן קצוב תגובת SDO.
- תומך בניהול NMT.
- תומך בפונקציית SYNC.
- תומך בפונקציית חיי ה-Guard (פרוטוקולים של שמירה על חיים ופעימות לב).
- תומך בפונקציית שליחת מחזור RPDO.
- תומך בהשהיית מאסטר CANopen לפונקציית ההפעלה.
- תומך בפונקציית מצב בקרה.
- פונקציה הניתנת להגדרה של הפקודה NMT_RESET.
[5] טמפרטורת הפעלה: -40°F~140°F(-20°C עד 60°C). לחות יחסית: 5% עד 95% (לא מתעבה).
[6] הספק: 24VDC (11V~30V), 80mA (24VDC).
[7] מידות חיצוניות (W*H*D): 1.0 אינץ'*4.0 אינץ' *3.6 אינץ' (25 מ"מ*100 מ"מ*90 מ"מ).
[8] התקנה: מסילת DIN בגודל 1.38 אינץ' (35 מ"מ);
[9] רמת הגנה: IP20.
1.4 מוצרים קשורים
מוצרים קשורים כוללים:
- GT100-CO-RS
- GT200-CO-RS
- GT200-EI-CO
- GT200-PN-CO
- GT200-DP-CO
כדי לקבל מידע נוסף על מוצרים קשורים, בקר ב-SST Automation שלנו webאֲתַר: www.sstautomation.com
1.5 היסטוריית גרסאות
| עדכון | תַאֲרִיך | פֶּרֶק | תֵאוּר |
| V3.0 | 02/27/2022 | כֹּל | מהדורה חדשה |
תיאורי חומרה
 הערות: תמונה זו היא לעיון בלבד. מראה המוצר כפוף למוצר בפועל.
הערות: תמונה זו היא לעיון בלבד. מראה המוצר כפוף למוצר בפועל.
2.2 מחווני LED
| LED | מְדִינָה | תיאור המדינה |
| אני \ ש | ירוק און | נוצר חיבור Modbus TCP |
| ירוק מהבהב | חיבור TCP של Modbus לא נוצר | |
| אדום מהבהב | פסק זמן לחיבור Modbus TCP | |
| מהבהב כתום (מהבהב לסירוגין עם CNS) | מצב תצורה | |
| כתום מהבהב | סטטוס התחלה | |
| ( נ.ס | אדום פועל | אוטובוס כבוי |
| נורה אדומה דולקת מעת לעת | מונה השגיאות של בקר ה-CAN מגיע או עולה על ערך השמירה (יותר מדי מסגרות שגיאה) | |
| ירוק און | הצומת נמצא במצב ריצה | |
| כתום מהבהב פעם אחת | סטטוס התחלה | |
| מהבהב כתום (מהבהב לסירוגין עם ה-ENS) | מצב תצורה | |
| כתום על | ניהול NMT. ממתין ל-BOOTP של כל העבדים (בשימוש כאשר NMT מופעל) |
2.3 מתג/לחצן תצורה
מתג DIP משמש להגדרת מצב ההפעלה של המכשיר.![]()
| פונקציה (ביט 1) | מצב (ביט 2) | תֵאוּר |
| שָׁמוּר | לְעִתִים קְרוֹבוֹת | מצב ריצה, אוסר על קריאה וכתיבה של נתוני תצורה |
| כבוי | On | מצב תצורה, עם כתובת IP קבועה 192.168.0.10, יכול רק לקרוא ולכתוב נתוני תצורה |
| on | On | מצב BootLoader, עם כתובת IP קבועה 192.168.0.10 |
הערות: הפעל מחדש את GT200-MT-CO לאחר איפוס התצורה כדי שהקונפיגורציה תיכנס לתוקף!
2.4 ממשק
2.4.1 ממשק כוח
| פִּין | פוּנקצִיָה |
| 1 | הארקת חשמל (24V DC-) |
| 2 | NC (לא מחובר) |
| 3 | +24V DC |
2.4.2 ממשק אתרנט ממשק ה-Ethernet משתמש בממשק RJ45, עוקב אחר תקן IEEE802.3u 100BASE-T, עם משא ומתן אוטומטי של 10/100M. ה-pinout שלו (אות Ethernet סטנדרטי) מוגדר כדלקמן:
ממשק ה-Ethernet משתמש בממשק RJ45, עוקב אחר תקן IEEE802.3u 100BASE-T, עם משא ומתן אוטומטי של 10/100M. ה-pinout שלו (אות Ethernet סטנדרטי) מוגדר כדלקמן:
| פִּין | תיאור האות |
| 1 | TXD+, Tranceive Data+, פלט |
| 2 | TXD-, טראנסיב נתונים-, פלט |
| 3 | RXD+, קבל נתונים+, קלט |
| 6 | RXD-, קבלת נתונים-, קלט |
| 4,5,7,8 | (שָׁמוּר) |
 השער משתמש במחבר פתוח עם שלושה פינים בצד של CAN:
השער משתמש במחבר פתוח עם שלושה פינים בצד של CAN:| פִּין | קֶשֶׁר |
| 1 | אני יכול |
| 2 | מגן (אופציונלי) |
| 3 | CAN-H |
מסוף CAN מצויד במתג נגד מסוף של 120Ω ; כאשר המתג מופעל, התנגדות המסוף מחוברת; כאשר המתג כבוי, התנגדות המסוף מנותקת.
גודל (רוחב * גובה * עומק): 1.0 אינץ' * 4.0 אינץ' * 3.6 אינץ' (25 מ"מ * 100 מ"מ * 90 מ"מ)
 2.6 שיטת התקנה
2.6 שיטת התקנהבאמצעות מסילת DIN בגודל 1.4 אינץ' (35 מ"מ).

מדריך להתחלה מהירה
- ודא שה-GT200-MT-CO נמצא במצב ההפעלה המתאים המאפשר הגדרה. מומלץ להגדיר את השער למצב תצורה (מתגי תצורה של Bit 1 OFF ו-Bit 2 ON) ואז ה-IP של השער יקבע ב-192.168.0.10.
- השתמש בכבל Ethernet כדי לחבר את ה-GT200-MT-CO למחשב האישי.
- חבר את מכשירי ה-CAN על ידי חיבור פינים 1 ו-3 לכל הפחות.
- חבר את ספק הכוח ולאחר מכן הפעל את המכשיר.
- הפעל את תוכנת SST-MTC-CFG כדי להתחיל בתהליך ההגדרה.
- בתוכנת התצורה, הגדר את קצב ההעברת ה-CAN, מזהה הצומת וכתובת ה-IP. (ראה פרקים 4.5 ו-4.7.4 לפרטים).
- לאחר הגדרת השער, הגדר את מתג DIP של התצורה Bit 2 כבוי. הפעל שוב והמודול יעבור למצב ריצה.
משתמשים יכולים לחבר את השער למחשב דרך יציאת RJ-45. משתמשים יכולים להשתמש ב-SST-MTC-CFG כדי לסיים את קביעת התצורה של GT200-MT-CO בקלות, כולל כתובת IP, קצב השאיבה של יציאת CANopen ופקודות CANopen.
ישנן שתי דרכים להגדיר את כתובת ה-IP: הקצאה ידנית ו-DHCP. הקצאה ידנית פירושה שהמשתמש מגדיר באופן ידני את ה-IP במצב התצורה. כאשר המשתמש בוחר להשתמש ב-DHCP, המשתמש חייב להשתמש בנתב Ethernet (שער, רכזת, מתג) כדי להקצות IP במצב פועל.
3.3.1 מצב החלפת נתונים
מצב התקשורת בין CAN open לבין Ethernet/IP הוא מצב אסינכרוני, כפי שמוצג להלן:
 "נתונים 1" מציג את תהליך העברת הנתונים מ- Modbus TCP ל-CAN; "Data 2" מציג את תהליך העברת הנתונים מ-CAN ל- Modbus TCP.
"נתונים 1" מציג את תהליך העברת הנתונים מ- Modbus TCP ל-CAN; "Data 2" מציג את תהליך העברת הנתונים מ-CAN ל- Modbus TCP.פלט Modbus TCP I/O יכול לשאת 0 לנתוני CAN מרובים. לאחר שהשער מקבל אותו, הוא שולח את המסגרת הפתוחה של CAN, ולאחר מכן אורז את מסגרת תגובת ה-CANopen שהתקבלה לתוך קלט קלט/פלט ושולח אותו ל- Modbus TCP Clinet. TPDO ו-RPDO מיישמים מצב יצרן/צרכן, ולעתים קרובות משמשים אותם באירוע עם דרישה גבוהה לגבי מהירות; העלאת SDO ו-Download SDO מחיל מצב לקוח/שרת, המצב יכול להבטיח בטיחות נתונים, ולעתים קרובות נעשה בו שימוש במקרים עם דרישה למהירות נמוכה.
GT200-MT-CO תומך בפונקציית NMT פשוטה: הוא תומך באתחול פשוט של כל פונקציות העבדים CAN open. GT200-MT-CO תומך בפונקציית חיי המשמר ובפונקציית SYNC.
הוראות תוכנה
לחץ פעמיים על סמל התוכנה בשולחן העבודה לאחר ההתקנה כדי להיכנס לממשק התצורה:
 4.1 סרגל כלים
4.1 סרגל כליםסרגל הכלים מוצג להלן:
 הפונקציה של סרגל הכלים: חדש, שמור, פתח, הוסף צומת, מחק צומת, הוסף פקודה, מחק פקודה, העלאה, הורדה, מיפוי אוטומטי, התנגשות וייצוא EXCEL.
הפונקציה של סרגל הכלים: חדש, שמור, פתח, הוסף צומת, מחק צומת, הוסף פקודה, מחק פקודה, העלאה, הורדה, מיפוי אוטומטי, התנגשות וייצוא EXCEL.| חדש: צור פרויקט תצורה חדש | |
| שמור: שמור את התצורה הנוכחית | |
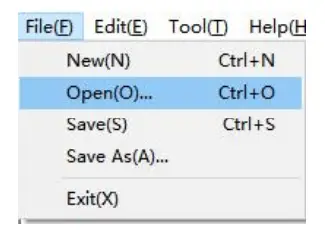
| פתח: פתח פרויקט תצורה | |
| הוסף צומת: הוסף צומת CANopen | |
| מחק צומת: מחק צומת CANopen | |
| הוסף פקודה: הוסף פקודת CANopen | |
| מחק פקודת: מחק פקודת CANopen | |
| העלאה: קרא את מידע התצורה מהמודול והצג אותו בתוכנה | |
| הורדה: הורד את התצורה file אל השער | |
| מפה אוטומטית: משמש לחישוב אוטומטי של כתובת הזיכרון הממופת ללא התנגשות על ידי כל פקודה | |
| Confilct: כדי לבדוק אם יש כמה התנגשויות עם פקודות מוגדרות במאגר הנתונים של זיכרון השער. | |
| ייצוא EXCEL: ייצא את התצורה הנוכחית לדיסק הקשיח המקומי, שנשמר כ-.xls file. | |
| ניפוי באגים: שמור |
פרמטרים מאותחלים חדשים לפתיחת ממשק התצורה:
פֶּתֶק: הפונקציה החדשה משמשת בעיקר לתצורה לא מקוונת, כלומר, ניתן להשתמש בפרמטרי האתחול כדי לפתוח את ממשק התצורה כאשר אין ציוד.
 4.3 פתח ושמור תצורה
4.3 פתח ושמור תצורהבחר "פתח", אתה יכול לפתוח את פרויקט התצורה ששמרת.
 בחר "שמור" או "שמור בשם", אתה יכול לשמור את פרויקט התצורה עם .chg בתור הסיומת שלו.
בחר "שמור" או "שמור בשם", אתה יכול לשמור את פרויקט התצורה עם .chg בתור הסיומת שלו.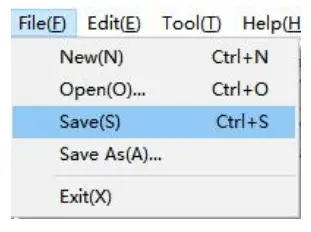 לחץ על סמל
לחץ על סמל הערה: לאחר שמירת הפרמטרים בתור א file, הנתונים ב- file ניתן לשנות על ידי המשתמש, אך נא לוודא את נכונות הנתונים שהשתנו, אחרת הנתונים השגויים יעובדו בהתאם לערך ברירת המחדל.
הערה: לאחר שמירת הפרמטרים בתור א file, הנתונים ב- file ניתן לשנות על ידי המשתמש, אך נא לוודא את נכונות הנתונים שהשתנו, אחרת הנתונים השגויים יעובדו בהתאם לערך ברירת המחדל.נא לא לשנות את מילות המפתח של הנתונים, נא לא להוסיף רווחים.
בחר "העלה", זה יקרא תצורות מהשער, והממשק מוצג כדלקמן:
 בחר את המכשיר, לחץ על כניסה.
בחר את המכשיר, לחץ על כניסה. לחץ על העלה.
לחץ על העלה. בחר "העלה", זה יקרא את התצורה שהוחלה מהשער, והממשק מוצג כדלקמן:
בחר "העלה", זה יקרא את התצורה שהוחלה מהשער, והממשק מוצג כדלקמן: בחר "הורד", זה יוריד את התצורות לשער, והממשק מוצג כ לְהַלָן:
בחר "הורד", זה יוריד את התצורות לשער, והממשק מוצג כ לְהַלָן: פֶּתֶק: כתובת ה-IP קבועה ל-192.168.0.10 במצב תצורה GT200-MT-CO.
פֶּתֶק: כתובת ה-IP קבועה ל-192.168.0.10 במצב תצורה GT200-MT-CO.ממשק תצורת Modbus TCP מוצג להלן:
 בפרמטרים לעיל, המידע המפורט מוצג להלן:
בפרמטרים לעיל, המידע המפורט מוצג להלן:הקצה מצב IP: הקצאה ידנית ו-DHCP אופציונליים.
כתובת IP: כתובת IP של GT200-MT-CO
מסכת רשת משנה: מסכת רשת משנה של GT200-MT-CO
שער ברירת מחדל: כתובת השער GT200-MT-CO ממוקמת ב-LAN
בדוק מזהה יחידה: בדוק מזהה יחידה: פועל או כבוי. כאשר אתה פותח אותו, אתה יכול להגדיר את השער ככתובת התחנה של שרת Modbus TCP
מזהה יחידה: השער ככתובת התחנה של שרת Modbus TCP. מזהה היחידה מופעל כאשר "בדוק מזהה יחידה" מופעל, הטווח: 1 עד 247, ערך ברירת המחדל הוא 1.
קוד פונקציה לקריאת נתונים: קוד פונקציה 04/03 קורא את נתוני הקלט: Modbus TCP Client יכול לבחור קוד פונקציה 04 או 03, ולקרוא את נתוני התקן CANopen שנאספו דרך השער.
4.6 ניתן לפתוח פרמטרים של תצורה
קביעת תצורה של פרמטרי רשת של CANopen, כולל קצב פתיחת Baud CAN, מזהה צומת CAN לפתוח, פסק זמן לתגובת SDO, הפעלת NMT, נקה זמן נתונים עבור TPDO, SYNC, Guard Life, The Cycle for RPDO Transmission, 5Delay to Startup, Control & Monitor Status, Output עיבוד נתונים, המחזור להעברת SDO, פקודת SDO שליחה בצד MT, ניסיונות לכשל בפקודת SDO וזמן השהיית סקר SDO. ממשק התצורה של CANopen מוצג להלן:
 מכשיר 4.7 View מִמְשָׁק
מכשיר 4.7 View מִמְשָׁקמכשיר 4.7.1 View מִמְשָׁק
 4.7.2 מצב פעולה
4.7.2 מצב פעולהתומך בשלושה סוגים של מצבי פעולה: תפריט עריכה, סרגל כלים ותפריט עריכה בלחיצה ימנית.
 4.7.3 סוגי פעולה
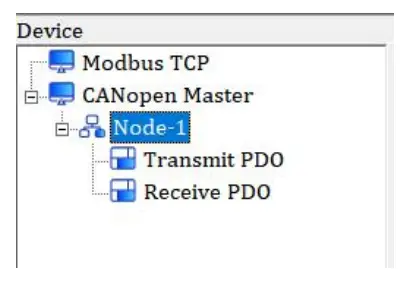
4.7.3 סוגי פעולה- הוסף צומת: לחץ שמאל על CANopen Networks או על צמתים קיימים, ולאחר מכן בצע את פעולת הוספת הצומת החדש. אז יהיה צומת חדש בשם "צומת חדש" תחת CANopen Network (לצומת החדש שנוסף אין כתובת. צמתים ללא כתובות אינם חוקיים. נא להזין את כתובת הצומת. לא ניתן לחזור על כתובת הצומת).
- מחיקת צומת: לחץ שמאל על הצומת למחיקה ולאחר מכן בצע את פעולת מחיקת הצומת. הצומת וכל הפקודות יימחקו. הוסף פקודות: לחץ שמאלי על הצומת, ולאחר מכן בצע את פעולת הוספת הפקודה להוספת פקודה עבור הצומת. תיבת הדו-שיח לבחירת פקודות תופיע למשתמשים לבחירה. מוצג להלן:
פקודות: העלה SDO->ENet In, Download SDO <- ENet Out, Transmit PDO-> ENet In, Receive PDO<- ENet Out - בחר פקודות: לחץ פעמיים על פקודה.

- מחק פקודה: לחץ לחיצה ימנית על פקודה ותוכל למחוק אותה.
- העתקת צומת: לחץ שמאלי על הצומת הקיים, בחר את הצומת ובצע את פעולת העתקת הצמתים (כלול את כל הפקודות מתחת לצומת).
- הדבק צומת: לחץ שמאלי ובחר כל צומת קיים, בצע את פעולת הדבקת הצומת. ואז מתחת לעץ CANopen Network אתה יכול לראות את הצומת החדש (כלול את כל הפקודות מתחת לצומת). הפרמטרים של הצומת החדש הם הגדרת ברירת מחדל, יש לאפס אותו.
פרמטרים הניתנים להגדרה מוצגים כדלקמן:
CAN לפתוח קצב Baud, CAN לפתוח מזהה צומת, זמן קצוב תגובה של SDO, Enable NMT, NMT_RESET, Clear Data for TPDO, SYNC, Guard Life, The Cycle for RPDO Transmission, Delay to Startup, Control & Monitor Status, Output Data Processing, המחזור לשידור SDO, ניסיונות לכשל בפקודת SDO וזמן השהיה של SDO.
ממשק התצורה של CAN פתוח מוצג להלן:
 ניתן לבחור קצב פתיחה של Baud: 50K, 100K, 125K, 250K, 500K, 1M; ערך ברירת המחדל הוא 250K
ניתן לבחור קצב פתיחה של Baud: 50K, 100K, 125K, 250K, 500K, 1M; ערך ברירת המחדל הוא 250Kמזהה צומת קאנו: 1 עד 127, ערך ברירת המחדל הוא 127
זמן קצוב תגובה של SDO: פרמטר זה מבוסס על 10 מילישניות. הטווח של ערך הפרמטר הוא 1 עד 200. ערך ברירת המחדל הוא 200
אפשר NMT: בין אם להפעיל את כל הצמתים הפתוחים של CAN ברשת או לא, ברירת המחדל היא השבתה
0: אל תשתמש בפונקציה;
ערך לא אפס: השתמש בפונקציית הזמן הקצוב וערך הזמן הקצוב הוא כפולה אינטגרלית שאינה מאפס של 10 אלפיות השנייה, הטווח הוא 0 עד 200, ברירת המחדל היא 0
SYNC: מחזור סנכרון
0: אל תשתמש בפונקציית מחזור הסנכרון
ערך שאינו אפס: השתמש בפונקציה, ומחזור הסנכרון הוא כפולה אינטגרלית שאינה מאפס של 1 אלפיות השנייה, הטווח הוא 0 עד 6000, ברירת המחדל היא 0.
המחזור עבור שידור RPDO: המחזור עבור שידור RPDO מבוסס על 1ms. אפס פירושו להשתמש במצב השינוי של פלט הערך; לא אפס פירושו לשלוח את כל ה-RPDO בהתאם למחזור. מחזור שליחת שווה לערך ההגדרה, ערך ברירת המחדל הוא 0. הטווח: 0~60000. הערה: פרמטר זה וקצב העברת ה-CAN רלוונטיים עם מספרי פקודות RPDO. אם המערכת מתמקדת בביצועים בזמן אמת, מומלץ להגדיר ערך זה ל-0, כלומר שינוי פלט ערך.
השהיה להפעלה: ערך השהיה
0: אל תשתמש בפונקציה;
ערך שאינו אפס: השתמש בפונקציה, וערך ההשהיה הוא כפולה אינטגרלית שאינה מאפס של 1 אלפיות השנייה, הטווח הוא
0 עד 60000, ברירת המחדל היא 0.
מצב בקרה וניטור: שני הבתים הראשונים של מאגר הפלט משמשים כבייט סטטוס של עבד CANopen. הבית הראשון של שני בתים זה הוא כתובת של CANopen salve, והבית השני הוא הפקודה ששולטת ב-CANopen slave (למשל, הזן מצב טרום-פעולה, הזנת מצב פעולה, הזנת מצב עצירה, איפוס צומת, איפוס אפליקציה, איפוס תקשורת, וכו.). בחירה ב"הפעל", SST-ETC-CFG ימנע שני בתים בעת חישוב כתובת מיפוי אוטומטית ושני בתים אלו נשמרים בחזית המאגר, ברירת המחדל היא "השבת".
ברור פירושו להגדיר את הנתונים לאפס;
החזקה פירושה לשמור על הנתונים ללא שינוי לפני ש-TCP כבוי.
המחזור עבור שידור SDO: המחזור עבור שידור SDO, מבוסס על 1ms. אפס פירושו Download SDO משתמש במצב של שינוי פלט ערך, Upload SDO משתמש במצב של קריאת נתוני עבד ללא הפסקה; לא אפס פירושו לשלוח את כל ה-SDO בהתאם למחזור. מחזור שליחת שווה לערך ההגדרה, ערך ברירת המחדל הוא 0. הטווח: 0 עד 60000.
ניסיונות לכשל בפקודת SDO: תחנת ה-CANopen Master שולחת בקשת SDO, אך אינה מקבלת תשובה מתחנת ההתקן. התחנה הראשית תשלח שוב ושוב בקשת SDO זו. מספר החזרות הוא הערך שנקבע על ידי פרמטר זה, טווח: 0 עד 5, ברירת מחדל: 0.
SDO Polling Delay Time: תחנת ה-CANopen Master שולחת את בקשת ה-SDO ומקבלת את התגובה מתחנת המכשיר. התחנה הראשית צריכה לעכב פרק זמן לפני שליחת בקשת ה-SDO הבאה. פרק זמן זה הוא זמן ההשהיה של SDO Polling. יחידה: ms, טווח: 0 עד 60000, ברירת מחדל: 0.
4.7.5 תצורת פקודה
בממשק המכשיר, לחץ לחיצה ימנית על פקודה ואז ממשק התצורה מוצג להלן:

- כתובת מכשיר CANopen: כתובת מכשיר CANopen, הטווח הוא 1 עד 127.
- COB-ID: מזהה ה-CAN (עשרוני) של CANopen PDO:
ערך ברירת המחדל של פקודת Transmit PDO: 384(0x180) + מזהה צומת או 640(0x280) + מזהה צומת או 896 (0x380) + מזהה צומת או 1152(0x480) + מזהה צומת.
ערך ברירת המחדל של Receive PDO: 512(0x200) + מזהה צומת או 768(0x300) + מזהה צומת או 1024 (0x400) + מזהה צומת או 1280 (0x500) + מזהה צומת.
אם משתמשים רוצים למלא ערך מותאם אישית, אנא מלא את הערך הנדרש ישירות כאשר פריט מותאם אישית נבחר בתיבת האפשרויות הנפתחת. הטווח הוא (1~127) & (257~1408) & (1664~1791) & (1920~2046). - מספר בתים: מספר בתים של נתונים. טווח: 1~8.
- כתובת מיפוי: כתובת מיפוי של כתובת הזיכרון הפנימי של השער (עשרוני). טווח: 0-1999. ניתן למלא את כתובת המיפוי באופן ידני או אוטומטי על ידי פונקציית המיפוי האוטומטית.
- תיאור: משתמשים יכולים להזין כאן תיאורים תיאוריים של פריטי תצורת הפרויקט. אלה אינם יורדים בפועל למכשיר השער, מה שיכול לעזור למשתמשים להבחין בין הפונקציות שלהם, כגון "סטטוס" וכו'. ולא ניתן להשתמש בהם.

- ערך אינדקס: ערך אינדקס במילון אובייקט המכשיר (Hex, 0001H עד FFFFH).
- ערך תת-אינדקס: ערך תת-אינדקס במילון אובייקט ההתקן (Hex, 00H עד FFH).
- מספר בתים: מספר בתים: חייב להיות 1 או 2 או 4.
- כתובת מיפוי: כתובת מיפוי של כתובת הזיכרון הפנימי של השער (עשרוני). טווח: 0-1999. ניתן למלא את כתובת המיפוי באופן ידני או אוטומטי על ידי פונקציית המיפוי האוטומטית.
מקסימום פקודות SDO ≤ 100
ממשק הערות מציג את ההסבר של פריט התצורה הרלוונטי. כאשר פריט התצורה הוא "אינדקס
ערך", ממשק ההערות מוצג כך:

מסמכים / משאבים
 |
SST Automation GT200-MT-CO Modbus TCP Canopen Gateway [pdfמדריך למשתמש GT200-MT-CO Modbus TCP Canopen Gateway, GT200-MT-CO, Modbus TCP Canopen Gateway, TCP Canopen Gateway, Gateway |