![]() Ավտոմատացում GT200-MT-CO Modbus TCP Canopen Gateway
Ավտոմատացում GT200-MT-CO Modbus TCP Canopen Gateway
Օգտագործողի ձեռնարկ
Կարևոր տեղեկություն
Զգուշացում
Տվյալները և նախկինampԱյս ձեռնարկի տեքստերը չեն կարող պատճենվել առանց թույլտվության: SST Automation-ը իրավունք է վերապահում թարմացնել ապրանքը առանց օգտվողներին ծանուցելու:
Ապրանքը ունի բազմաթիվ կիրառություններ: Օգտագործողները պետք է համոզվեն, որ բոլոր գործողությունները և արդյունքները համապատասխանում են համապատասխան ոլորտների անվտանգությանը, և անվտանգությունը ներառում է օրենքներ, կանոններ, ծածկագրեր և ստանդարտներ:
Հեղինակային իրավունք
Հեղինակային իրավունք © 2023 SST Automation Co., Ltd. Բոլոր իրավունքները պաշտպանված են:
Ապրանքային նշան
![]() SST Automation-ի գրանցված ապրանքային նշանն է:
SST Automation-ի գրանցված ապրանքային նշանն է:
Տեխնիկական աջակցության Կոնտակտային տվյալներ www.sstautomation.com
www.sstcomm.com Էլ. փոստ: support@sstautomation.com
Ապրանքը ավարտվել էview
1.1 Ապրանքի գործառույթը
Դարպասը աջակցում է CANopen սարքերի միացմանը Modbus TCP ցանցին, այն կարող է իրականացնել տվյալների հաղորդակցություն բազմաթիվ CANopen սարքերի և բազմաթիվ Modbus TCP հաճախորդների միջև:
1.2 Ապրանքի առանձնահատկությունը
- Աջակցում է մեկ ալիք CAN 2.0A:
- CAN ինտերֆեյս՝ 3KV ֆոտոէլեկտրական մեկուսացում:
- Գործում է որպես CAN բաց վարպետ, աջակցում է 100 PDO և 100 SDO հրամաններ:
- Աջակցում է մինչև 8 Modbus TCP հաճախորդ:
- Աջակցում է 2 ալիք, 10M/100M ցանցային նավահանգիստ:
1.3 Տեխնիկական բնութագրեր
[1] Ethernet ինտերֆեյս.
- Աջակցում է 2 10M/100M (ավտոբանակցային) ցանցային պորտեր՝ ներկառուցված անջատիչով:
- Աջակցում է Modbus TCP արձանագրությանը և գործում է որպես Modbus TCP սերվեր:
- Աջակցում է մինչև 8 Modbus TCP հաճախորդների միացմանը:
- Աջակցում է ֆունկցիոնալ կոդերին՝ 03H, 04H, 06H, 10H:
- Մուտքային ռեգիստրի մեկնարկային հասցեն 0 է (պահում է ստացված CAN շրջանակը) և աջակցում է 04H ֆունկցիայի կոդը:
- Ելքային ռեգիստրի մեկնարկային հասցեն 0 է (պահում է CAN շրջանակները, որոնք պետք է ուղարկվեն), և աջակցում է 03H, 06H և 16H ֆունկցիայի կոդերը:
- Աջակցում է 03 կամ 04 ֆունկցիայի կոդը՝ մուտքային/ելքային տվյալների տարածքը կարդալու համար:
- Աջակցում է IP հասցեի և DHCP-ի ստատիկ կազմաձևմանը:
[2] Հաղորդակցության արագություն. CAN baud արագություն՝ 10 կբիտ/վ, 20 կբիտ/վ, 50 կբիտ/վ, 100 կբիտ/վ, 125 կբիտ/վ, 250 կբիտ/վ, 500 կբիտ/վ, 1 Մբիտ/վ:
[3] CAN ինտերֆեյսը աջակցում է CAN2.0A արձանագրությանը:
[4] DS-301 V4.02 և CiA 303 հանձնարարականի նախագծին համապատասխան: - Աջակցում է առավելագույնը 8 բայթ TPDO և RPDO:
- Աջակցում է առավելագույնը 100 PDO հրամաններ և առավելագույնը 100 SDO հրամաններ:
- Աջակցում է SDO արագ ներբեռնմանը և SDO արագ վերբեռնմանը:
- TPDO-ի և RPDO-ի COB-ID-ը կարող է սահմանվել օգտագործողի կողմից, կամ կարող է օգտագործվել լռելյայն COBID-ը:
- Աջակցում է Մաքրել տվյալների ժամանակը TPDO ֆունկցիայի համար:
- Աջակցում է SDO արձագանքման ժամանակի դադարեցման գործառույթը:
- Աջակցում է NMT կառավարմանը:
- Աջակցում է SYNC գործառույթը:
- Աջակցում է Guard life ֆունկցիան (Life-guarding and Heartbeat արձանագրություններ):
- Աջակցում է RPDO ցիկլի ուղարկման գործառույթը:
- Աջակցում է CANopen-ի հիմնական հետաձգումը գործարկման գործառույթին:
- Աջակցում է Control Status ֆունկցիան:
- NMT_RESET հրամանի կարգավորելի գործառույթ:
[5] Աշխատանքային ջերմաստիճանը՝ -40 °F~140 °F (-20 °C-ից 60 °C): Հարաբերական խոնավությունը՝ 5% -ից 95% (չխտացնող):
[6] Հզորությունը՝ 24VDC (11V~30V), 80mA (24VDC):
[7] Արտաքին չափսեր (Վ*Հ*Դ)՝ 1.0 դյույմ*4.0 *3.6 դյույմ (25 մմ*100 մմ*90 մմ)։
[8] Տեղադրում՝ 1.38 դյույմ (35 մմ) DIN RAIL;
[9] Պաշտպանության մակարդակ՝ IP20:
1.4 Հարակից ապրանքներ
Հարակից արտադրանքները ներառում են.
- GT100-CO-RS
- GT200-CO-RS
- GT200-EI-CO
- GT200-PN-CO
- GT200-DP-CO
Հարակից ապրանքների մասին լրացուցիչ տեղեկություններ ստանալու համար այցելեք մեր SST Automation webկայքը: www.sstautomation.com
1.5 Վերանայման պատմություն
| Վերանայման | Ամսաթիվ | Գլուխ | Նկարագրություն |
| V3.0 | 02/27/2022 | ԲՈԼՈՐ | Նոր թողարկում |
Սարքաշարի նկարագրություններ
 Նշումներ: Այս նկարը միայն հղման համար է։ Արտադրանքի տեսքը ենթակա է իրական արտադրանքի:
Նշումներ: Այս նկարը միայն հղման համար է։ Արտադրանքի տեսքը ենթակա է իրական արտադրանքի:
2.2 LED ցուցիչներ
| LED | Պետություն | Պետական նկարագրություն |
| Ես \ Ս | Կանաչ | Modbus TCP կապը հաստատված է |
| Կանաչ թարթում | Modbus TCP կապը հաստատված չէ | |
| Կարմիր Թարթում | Modbus TCP կապի ժամանակի ավարտը | |
| Նարնջագույն թարթում (հերթականորեն թարթում է CNS-ով) | Կազմաձևման կարգավիճակը | |
| Նարնջագույն Թարթում | Սկսելու կարգավիճակը | |
| (Ն.Ս | Կարմիր միացված | ԱՎՏՈԲՈՒՍՆ ԱՆՋԱՏԵՑ |
| Կարմիր լույսը պարբերաբար վառվում է | CAN կարգավորիչի սխալների հաշվիչը հասնում է կամ գերազանցում է պահակային արժեքը (չափազանց շատ սխալի շրջանակներ) | |
| Կանաչ | Հանգույցը գործարկման ռեժիմում է | |
| Նարնջագույն Թարթում է մեկ ու անջատ | Սկսելու կարգավիճակը | |
| Նարնջագույն թարթում (հերթականորեն թարթում է ENS-ի հետ) | Կազմաձևման կարգավիճակը | |
| Նարնջագույն Միացված | NMT կառավարում. Սպասում է բոլոր ստրուկների BOOTP-ին (օգտագործվում է, երբ NMT-ը միացված է) |
2.3 Կազմաձևման անջատիչ/կոճակ
DIP անջատիչը օգտագործվում է սարքի աշխատանքային ռեժիմը կարգավորելու համար:![]()
| Գործառույթ (բիթ 1) | Ռեժիմ (բիթ 2) | Նկարագրություն |
| Վերապահված | Հաճախակի | Գործարկման ռեժիմ, արգելում է կարդալ և գրել կազմաձևման տվյալները |
| Անջատված | On | Կազմաձևման ռեժիմը, ֆիքսված IP հասցեով 192.168.0.10, միայն կարող է կարդալ և գրել կազմաձևման տվյալները |
| on | On | BootLoader ռեժիմ՝ ֆիքսված IP հասցեով 192.168.0.10 |
Նշումներ: Վերագործարկեք GT200-MT-CO-ն կոնֆիգուրացիան վերակայելուց հետո, որպեսզի կազմաձևումն ուժի մեջ մտնի:
2.4 Ինտերֆեյս
2.4.1 Power Interface
| Փին | Գործառույթ |
| 1 | Էլեկտրական հող (24V DC-) |
| 2 | NC (միացված չէ) |
| 3 | +24V DC |
2.4.2 Ethernet ինտերֆեյս Ethernet ինտերֆեյսը օգտագործում է RJ45 միջերեսը, որը հետևում է IEEE802.3u 100BASE-T ստանդարտին, 10/100M ինքնավար բանակցություններով: Դրա պինութը (ստանդարտ Ethernet ազդանշան) սահմանվում է հետևյալ կերպ.
Ethernet ինտերֆեյսը օգտագործում է RJ45 միջերեսը, որը հետևում է IEEE802.3u 100BASE-T ստանդարտին, 10/100M ինքնավար բանակցություններով: Դրա պինութը (ստանդարտ Ethernet ազդանշան) սահմանվում է հետևյալ կերպ.
| Փին | Ազդանշանի նկարագրություն |
| 1 | TXD+, Tranceive Data+, Արդյունք |
| 2 | TXD-, Tranceive Data-, Արդյունք |
| 3 | RXD+, Տվյալների ստացում+, մուտքագրում |
| 6 | RXD-, Ստանալ Տվյալներ-, Մուտք |
| 4,5,7,8 | (վերապահված) |
 Դարպասը օգտագործում է բաց երեք փին միակցիչ CAN-ի կողքին.
Դարպասը օգտագործում է բաց երեք փին միակցիչ CAN-ի կողքին.| Փին | Միացում |
| 1 | CAN-L |
| 2 | Վահան (ըստ ցանկության) |
| 3 | ԿԱՆ-Հ |
CAN տերմինալը հագեցած է 120Ω տերմինալային ռեզիստորի անջատիչով: Երբ անջատիչը միացված է, տերմինալի դիմադրությունը միացված է; երբ անջատիչը անջատված է, տերմինալի դիմադրությունն անջատված է:
Չափ (լայնություն * բարձրություն * խորություն)՝ 1.0 դյույմ * 4.0 դյույմ * 3.6 դյույմ (25 մմ * 100 մմ * 90 մմ)
 2.6 Տեղադրման մեթոդ
2.6 Տեղադրման մեթոդՕգտագործելով 1.4 դյույմ (35 մմ) DIN RAIL:

Արագ մեկնարկի ուղեցույց
- Համոզվեք, որ GT200-MT-CO-ն գտնվում է համապատասխան աշխատանքային ռեժիմում, որը թույլ է տալիս կոնֆիգուրացիան: Առաջարկվում է դարպասը դնել կոնֆիգուրացիայի ռեժիմի (կոնֆիգուրացիայի անջատիչներ Bit 1 OFF և Bit 2 ON), ապա դարպասի IP-ն կֆիքսվի 192.168.0.10-ում:
- Օգտագործեք Ethernet մալուխ GT200-MT-CO-ն համակարգչին միացնելու համար:
- Միացրեք CAN գործիքները՝ նվազագույնը միացնելով 1 և 3 կապանքները:
- Միացրեք էլեկտրամատակարարումը, ապա միացրեք սարքը:
- Գործարկեք SST-MTC-CFG ծրագրակազմը՝ կազմաձևման գործընթացը սկսելու համար:
- Կազմաձևման ծրագրաշարում սահմանեք CAN բուդի արագությունը, հանգույցի ID-ն և IP հասցեն: (Մանրամասների համար տե՛ս գլուխները 4.5 և 4.7.4):
- Դարպասի կազմաձևումից հետո անջատեք կազմաձևման DIP անջատիչը Bit 2 OFF: Կրկին միացրեք, և մոդուլը կմտնի գործարկման ռեժիմ:
Օգտագործողները կարող են միացնել դարպասը համակարգչին RJ-45 պորտի միջոցով: Օգտագործողները կարող են օգտագործել SST-MTC-CFG GT200-MT-CO-ի կարգավորումները հեշտությամբ ավարտելու համար, ներառյալ IP հասցեն, CANopen պորտի բուդի արագությունը և CANopen հրամանները:
IP հասցեն սահմանելու երկու եղանակ կա՝ Manually Assign և DHCP: Ձեռքով նշանակելը նշանակում է, որ օգտագործողը ձեռքով դնում է IP-ն կազմաձևման վիճակում: Երբ օգտագործողը ընտրում է օգտագործել DHCP, օգտագործողը պետք է օգտագործի Ethernet երթուղիչը (դարպաս, հանգույց, անջատիչ) IP-ն գործարկվող վիճակում հատկացնելու համար:
3.3.1 Տվյալների փոխանակման ռեժիմ
CAN open-ի և Ethernet/IP-ի միջև կապի ռեժիմը ասինխրոն ռեժիմ է, ինչպես ցույց է տրված ստորև.
 «Տվյալներ 1»-ը ցույց է տալիս տվյալների փոխանցման գործընթացը Modbus TCP-ից CAN; «Տվյալներ 2»-ը ցույց է տալիս տվյալների փոխանցման գործընթացը CAN-ից Modbus TCP:
«Տվյալներ 1»-ը ցույց է տալիս տվյալների փոխանցման գործընթացը Modbus TCP-ից CAN; «Տվյալներ 2»-ը ցույց է տալիս տվյալների փոխանցման գործընթացը CAN-ից Modbus TCP:Modbus TCP I/O ելքը կարող է փոխանցել 0 մինչև մի քանի CAN շրջանակային տվյալներ: Այն բանից հետո, երբ դարպասը ստանում է այն, այն ուղարկում է CAN բաց շրջանակը, այնուհետև փաթեթավորում է ստացված CANopen պատասխանի շրջանակը I/O մուտքագրման մեջ և այն ուղարկում Modbus TCP Clinet: TPDO-ն և RPDO-ն կիրառում են արտադրողի/սպառողի ռեժիմը և հաճախ օգտագործվում են այն դեպքերում, երբ արագության բարձր պահանջներ կան. Վերբեռնել SDO և Download SDO-ն կիրառում են հաճախորդի/սերվերի ռեժիմը, ռեժիմը կարող է երաշխավորել տվյալների անվտանգությունը և հաճախ օգտագործվում են ցածր արագության պահանջով դեպքերում:
GT200-MT-CO-ն աջակցում է պարզ NMT ֆունկցիայի. Այն աջակցում է CAN բաց ստրուկի բոլոր գործառույթների պարզ գործարկմանը: GT200-MT-CO-ն աջակցում է Guard life ֆունկցիան և SYNC ֆունկցիան:
Ծրագրային ապահովման հրահանգներ
Տեղադրվելուց հետո աշխատասեղանի վրա կրկնակի կտտացրեք ծրագրաշարի պատկերակը` կազմաձևման միջերես մուտք գործելու համար.
 4.1 Գործիքադարակ
4.1 ԳործիքադարակԳործիքադարակը ցուցադրված է հետևյալ կերպ.
 Գործիքադարակի գործառույթը՝ Նոր, Պահպանել, Բացել, Ավելացնել հանգույց, Ջնջել հանգույց, Ավելացնել հրաման, Ջնջել հրամանը, Վերբեռնել, Ներբեռնել, ԱվտոՔարտեզ, Կոնֆլիկտ և Արտահանել EXCEL:
Գործիքադարակի գործառույթը՝ Նոր, Պահպանել, Բացել, Ավելացնել հանգույց, Ջնջել հանգույց, Ավելացնել հրաման, Ջնջել հրամանը, Վերբեռնել, Ներբեռնել, ԱվտոՔարտեզ, Կոնֆլիկտ և Արտահանել EXCEL:| Նոր. Ստեղծեք նոր կազմաձևման նախագիծ | |
| Պահպանել. Պահպանել ընթացիկ կոնֆիգուրացիան | |
| Բացել: Բացեք կազմաձևման նախագիծը | |
| Ավելացնել հանգույց. Ավելացնել CANopen հանգույց | |
| Ջնջել հանգույցը. Ջնջել CANopen հանգույցը | |
| Ավելացնել հրաման. Ավելացնել CANopen հրաման | |
| Ջնջել հրամանը. ջնջել CANopen հրամանը | |
| Վերբեռնում. Կարդացեք կազմաձևման տեղեկատվությունը մոդուլից և ցուցադրեք այն ծրագրաշարում | |
| Ներբեռնում. Ներբեռնեք կոնֆիգուրացիան file դեպի դարպաս | |
| Ավտոմատ քարտեզ. Օգտագործվում է յուրաքանչյուր հրամանի կողմից քարտեզագրված հիշողության հասցեն առանց հակասության ավտոմատ հաշվարկելու համար | |
| Confilct. Ստուգելու համար, թե արդյոք առկա են որոշակի կոնֆլիկտներ կազմաձևված հրամանների հետ gateway-ի հիշողության տվյալների բուֆերում: | |
| Արտահանել EXCEL. արտահանել ընթացիկ կոնֆիգուրացիան տեղական կոշտ սկավառակի վրա, որը պահպանված է որպես .xls file. | |
| Վրիպազերծում: Պահպանված է |
Կազմաձևման ինտերֆեյսը բացելու նոր սկզբնավորված պարամետրեր.
Նշում. Նոր ֆունկցիան հիմնականում օգտագործվում է օֆլայն կոնֆիգուրացիայի համար, այսինքն՝ կարող եք օգտագործել սկզբնավորման պարամետրերը՝ կոնֆիգուրացիայի ինտերֆեյսը բացելու համար, երբ սարքավորում չկա:
 4.3 Բացել և պահպանել կոնֆիգուրացիան
4.3 Բացել և պահպանել կոնֆիգուրացիանԸնտրեք «Բացել», կարող եք բացել ձեր պահած կազմաձևման նախագիծը:
 Ընտրեք «Պահպանել» կամ «Պահպանել որպես», կարող եք պահպանել կազմաձևման նախագիծը .chg-ով որպես ընդլայնում:
Ընտրեք «Պահպանել» կամ «Պահպանել որպես», կարող եք պահպանել կազմաձևման նախագիծը .chg-ով որպես ընդլայնում: Սեղմեք պատկերակը
Սեղմեք պատկերակը Նշում. Պարամետրերը որպես a պահպանելուց հետո file, տվյալները մեջ file կարող է փոփոխվել օգտագործողի կողմից, սակայն խնդրում ենք համոզվել փոփոխված տվյալների ճշգրտությունը, հակառակ դեպքում սխալ տվյալները կմշակվեն ըստ լռելյայն արժեքի:
Նշում. Պարամետրերը որպես a պահպանելուց հետո file, տվյալները մեջ file կարող է փոփոխվել օգտագործողի կողմից, սակայն խնդրում ենք համոզվել փոփոխված տվյալների ճշգրտությունը, հակառակ դեպքում սխալ տվյալները կմշակվեն ըստ լռելյայն արժեքի:Խնդրում ենք չփոխել տվյալների հիմնաբառերը, խնդրում ենք բացատներ մի ավելացրեք:
Ընտրեք «Վերբեռնում», այն կկարդա դարպասի կազմաձևերը, և ինտերֆեյսը ցուցադրվում է հետևյալ կերպ.
 Ընտրեք սարքը, սեղմեք Մուտք գործեք:
Ընտրեք սարքը, սեղմեք Մուտք գործեք: Սեղմեք Վերբեռնել:
Սեղմեք Վերբեռնել: Ընտրեք «Վերբեռնում», այն կկարդա դարպասից կիրառված կոնֆիգուրացիան, և ինտերֆեյսը ցուցադրվում է հետևյալ կերպ.
Ընտրեք «Վերբեռնում», այն կկարդա դարպասից կիրառված կոնֆիգուրացիան, և ինտերֆեյսը ցուցադրվում է հետևյալ կերպ. Ընտրեք «Ներբեռնում», այն կներբեռնի կոնֆիգուրացիաները դեպի դարպաս, և ինտերֆեյսը կցուցադրվի այսպես ստորև՝
Ընտրեք «Ներբեռնում», այն կներբեռնի կոնֆիգուրացիաները դեպի դարպաս, և ինտերֆեյսը կցուցադրվի այսպես ստորև՝ Նշում. IP հասցեն ամրագրված է 192.168.0.10 GT200-MT-CO կոնֆիգուրացիայի ռեժիմում:
Նշում. IP հասցեն ամրագրված է 192.168.0.10 GT200-MT-CO կոնֆիգուրացիայի ռեժիմում:Modbus TCP կազմաձևման ինտերֆեյսը ներկայացված է հետևյալ կերպ.
 Վերոնշյալ պարամետրերում մանրամասն տեղեկատվությունը ներկայացված է հետևյալ կերպ.
Վերոնշյալ պարամետրերում մանրամասն տեղեկատվությունը ներկայացված է հետևյալ կերպ.Նշանակել IP ռեժիմ. Ձեռքով նշանակել և DHCP ընտրովի:
IP հասցե՝ GT200-MT-CO-ի IP հասցեն
Ենթացանցային դիմակ. GT200-MT-CO-ի ենթացանցային դիմակ
Կանխադրված դարպաս. Gateway հասցեն GT200-MT-CO գտնվում է LAN-ում
Ստուգեք միավորի ID-ն. Ստուգեք միավորի նույնացուցիչը՝ միացված կամ անջատված: Երբ բացում եք այն, կարող եք դարպասը սահմանել որպես Modbus TCP սերվերի կայանի հասցե
Միավորի ID. Դարպասը՝ որպես Modbus TCP սերվերի կայանի հասցե: Միավորի ID-ն միացված է, երբ «Check Unit ID»-ն միացված է, միջակայքը՝ 1-ից 247, լռելյայն արժեքը 1 է:
Տվյալների ընթերցման գործառույթի կոդը. 04/03 ֆունկցիոնալ կոդը կարդում է մուտքային տվյալները. Modbus TCP Հաճախորդը կարող է ընտրել 04 կամ 03 ֆունկցիայի կոդը և կարդալ CANopen սարքի տվյալները, որոնք հավաքագրվել են դարպասի միջոցով:
4.6 ԿԱՐՈՂ Է բացել Կազմաձևման պարամետրերը
Կարգավորեք CANopen ցանցի պարամետրերը, ներառյալ CAN բացել Baud Rate, CAN Open Node ID, SDO Response Timeout, Enable NMT, Clear Data Time for TPDO, SYNC, Guard Life, The Cycle for RPDO Transmission, 5 Delay to start, Control & Monitor Status, Output Տվյալների մշակում, SDO փոխանցման ցիկլը, MT կողմի ուղարկման SDO հրաման, փորձեր SDO հրամանի ձախողում և SDO Polling Delay Time: CANopen-ի կազմաձևման ինտերֆեյսը ներկայացված է հետևյալ կերպ.
 4.7 Սարք View Ինտերֆեյս
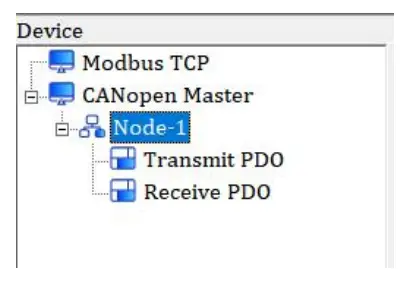
4.7 Սարք View Ինտերֆեյս4.7.1 Սարք View Ինտերֆեյս
 4.7.2 Գործողության ռեժիմ
4.7.2 Գործողության ռեժիմԱջակցում է երեք տեսակի գործառնական ռեժիմների՝ խմբագրել ընտրացանկը, խմբագրել գործիքագոտին և խմբագրել ընտրացանկը՝ աջ սեղմելով:
 4.7.3 Գործողության տեսակները
4.7.3 Գործողության տեսակները- Ավելացնել հանգույց. ձախ սեղմեք CANopen ցանցերի կամ առկա հանգույցների վրա, այնուհետև կատարեք նոր հանգույց ավելացնելու գործողությունը: Այնուհետև CANopen ցանցի տակ կլինի «Նոր հանգույց» անունով նոր հանգույց (Նոր ավելացված հանգույցը չունի հասցե: Առանց հասցեների հանգույցներն անվավեր են: Խնդրում ենք մուտքագրել հանգույցի հասցեն: Հանգույցի հասցեն չի կարող կրկնվել):
- Ջնջել հանգույցը. ձախ սեղմեք ջնջվող հանգույցի վրա, այնուհետև կատարեք ջնջման գործողությունը: Հանգույցը և բոլոր հրամանները կջնջվեն: Ավելացնել հրամաններ. ձախ սեղմեք հանգույցի վրա, այնուհետև կատարեք հրամանի ավելացման գործողությունը՝ հանգույցի համար հրաման ավելացնելու համար: Ընտրելու հրամանը երկխոսության տուփ կհայտնվի օգտվողների համար ընտրելու համար: Ստորև ներկայացված է.
Հրամաններ՝ վերբեռնել SDO->ENet In, Ներբեռնել SDO <- ENet Out, Transmit PDO-> ENet In, Receive PDO<- ENet Out - Ընտրեք հրամաններ. Կրկնակի սեղմեք հրամանի վրա:

- Ջնջել հրամանը. ձախ սեղմեք հրամանի վրա և կարող եք ջնջել այն:
- Պատճենել հանգույց. ձախ սեղմեք առկա հանգույցի վրա, ընտրեք հանգույցը և կատարեք հանգույցների պատճենման գործողությունը (ներառեք հանգույցի տակ գտնվող բոլոր հրամանները):
- Տեղադրեք հանգույց. ձախ սեղմեք և ընտրեք առկա ցանկացած հանգույց, կատարեք հանգույցի տեղադրման գործողությունը: Այնուհետև CANopen Network ծառի տակ կարող եք տեսնել նոր հանգույցը (ներառեք հանգույցի տակ գտնվող բոլոր հրամանները): Նոր հանգույցի պարամետրերը լռելյայն կարգավորված են, այն պետք է վերականգնվի:
Կարգավորելի պարամետրերը ներկայացված են հետևյալ կերպ.
ԿԱՐՈՂ Է բացել Baud Rate, ԿԱՐՈՂ Է բացել հանգույցի ID-ն, SDO արձագանքման ժամկետը, միացնել NMT, NMT_RESET, Մաքրել տվյալների ժամանակը TPDO-ի համար, SYNC, Guard Life, The Cycle for RPDO Transmission, Delay to start, Control & Monitor Status, Output Data Processing, SDO փոխանցման ցիկլը, SDO հրամանի ձախողման փորձերը և SDO հարցումների հետաձգման ժամանակը:
CAN բաց կազմաձևման ինտերֆեյսը ներկայացված է հետևյալ կերպ.
 Կարող է բացել Baud-ի արագությունը՝ 50K, 100K, 125K, 250K, 500K, 1M կարող է ընտրվել; լռելյայն արժեքը 250K է
Կարող է բացել Baud-ի արագությունը՝ 50K, 100K, 125K, 250K, 500K, 1M կարող է ընտրվել; լռելյայն արժեքը 250K էCanoe Node ID՝ 1-ից 127, լռելյայն արժեքը 127 է
SDO Response Timeout. Այս պարամետրը հիմնված է 10 միլիվայրկյանների վրա: Պարամետրի արժեքի միջակայքը 1-ից 200 է: Նախնական արժեքը 200 է
Միացնել NMT. Անկախ նրանից, թե սկսել բոլոր CAN բաց հանգույցները ցանցում, թե ոչ, կանխադրվածն անջատված է
0: Մի օգտագործեք գործառույթը;
Ոչ զրոյական արժեք. օգտագործեք ժամանակի վերջնաժամկետի ֆունկցիան, և ժամանակի վերջնաժամկետի արժեքը 10 միլիվայրկյանների ոչ զրոյական ինտեգրալ բազմապատիկ է, միջակայքը 0-ից 200 է, կանխադրվածը 0 է:
SYNC. համաժամացման ցիկլ
0. Մի օգտագործեք համաժամացման ցիկլի գործառույթը
Ոչ զրոյական արժեք. Օգտագործեք ֆունկցիան, և համաժամացման ցիկլը 1 միլիվայրկյանից ոչ զրոյական ինտեգրալ բազմապատիկ է, միջակայքը 0-ից 6000 է, կանխադրվածը 0 է:
RPDO փոխանցման ցիկլը. RPDO փոխանցման ցիկլը հիմնված է 1ms-ի վրա: Զրո նշանակում է օգտագործել ելքային արժեքի փոփոխության ռեժիմը. ոչ զրոյական նշանակում է ուղարկել բոլոր RPDO-ն ըստ ցիկլի: Ուղարկելու ցիկլը հավասար է սահմանման արժեքին, լռելյայն արժեքը 0 է: Միջակայքը՝ 0~60000: Նշում. Այս պարամետրը և CAN baud արագությունը համապատասխանում են RPDO հրամանի համարներին: Եթե համակարգը կենտրոնանում է իրական ժամանակի կատարման վրա, խորհուրդ է տրվում այս արժեքը սահմանել 0, այսինքն՝ ելքային արժեքի փոփոխություն:
Գործարկման հետաձգում. Հետաձգման արժեք
0: Մի օգտագործեք գործառույթը;
Ոչ զրոյական արժեք. օգտագործեք ֆունկցիան, և հետաձգման արժեքը 1 միլիվայրկյանից ոչ զրոյական ինտեգրալ բազմապատիկ է, միջակայքը՝
0-ից մինչև 60000, կանխադրվածը 0 է:
Control & Monitor Status. ելքային բուֆերի առաջին երկու բայթն օգտագործվում է որպես CANopen slave-ի կարգավիճակի բայթ: Այս երկու բայթի առաջին բայթը CANopen salve-ի հասցեն է, իսկ երկրորդ բայթը հրամանն է, որը վերահսկում է CANopen slave-ը (օրինակ՝ մուտքագրեք նախագործնական վիճակ, մուտքագրեք գործառնական վիճակ, մուտքագրեք կանգառ վիճակ, վերակայեք հանգույց, վերակայեք հավելվածը, վերակայեք հաղորդակցությունը, և այլն): Ընտրելով «Միացնել»՝ SST-ETC-CFG-ը կնվազի երկու բայթ քարտեզագրման հասցեն ավտոմատ կերպով հաշվարկելիս, և այս երկու բայթը պահվում է բուֆերի առջևում, լռելյայն «Անջատել» է:
Մաքրել նշանակում է զրոյականացնել տվյալները;
Պահել նշանակում է անփոփոխ պահել տվյալները՝ նախքան TCP-ն անջատելը:
SDO փոխանցման ցիկլը. SDO փոխանցման ցիկլը հիմնված է 1 մվ-ի վրա: Զրո նշանակում է Ներբեռնել SDO-ն օգտագործում է ելքային արժեքի փոփոխման ռեժիմ, Upload SDO-ն օգտագործում է ստրուկ տվյալների անդադար ընթերցման ռեժիմը. ոչ զրոյական նշանակում է ուղարկել բոլոր SDO-ն ըստ ցիկլի: Ուղարկելու ցիկլը հավասար է սահմանման արժեքին, լռելյայն արժեքը 0 է: Միջակայքը՝ 0-ից մինչև 60000:
SDO հրամանի ձախողման փորձեր. CANopen Master կայանը ուղարկում է SDO հարցում, բայց սարքի կայանից պատասխան չի ստանում: Գլխավոր կայանը բազմիցս կուղարկի այս SDO հարցումը: Կրկնումների քանակը այս պարամետրով սահմանված արժեքն է, միջակայքը՝ 0-ից 5, լռելյայն՝ 0:
SDO Polling Delay Time: CANopen Master կայանը ուղարկում է SDO հարցումը և ստանում պատասխան սարքի կայանից: Գլխավոր կայանը պետք է որոշ ժամանակ հետաձգի մինչև հաջորդ SDO հարցումն ուղարկելը: Ժամանակի այս ժամանակահատվածը SDO Polling-ի հետաձգման ժամանակն է: Միավորը՝ ms, միջակայքը՝ 0-ից մինչև 60000, լռելյայն՝ 0:
4.7.5 Հրամանի կազմաձևում
Սարքի ինտերֆեյսում ձախ սեղմեք հրամանի վրա, այնուհետև կազմաձևման ինտերֆեյսը ցուցադրվում է հետևյալ կերպ.

- CANopen Սարքի հասցե. CANopen Սարքի հասցե, միջակայքը 1-ից 127 է:
- COB-ID. CANopen PDO-ի CAN ID-ն (տասնորդական).
Transmit PDO հրամանի լռելյայն արժեքը՝ 384(0x180) + հանգույցի ID կամ 640(0x280) + հանգույցի ID կամ 896 (0x380) + հանգույցի ID կամ 1152 (0x480) + հանգույցի ID:
Ստանալու PDO-ի կանխադրված արժեքը՝ 512(0x200) + հանգույցի ID կամ 768(0x300) + հանգույցի ID կամ 1024 (0x400) + հանգույցի ID կամ 1280 (0x500) + հանգույցի ID:
Եթե օգտվողները ցանկանում են լրացնել հատուկ արժեք, խնդրում ենք լրացնել պահանջվող արժեքը անմիջապես, երբ ընտրված է Անհատականացված տարրը բացվող ընտրանքների վանդակում: Շրջանակը (1~127) & (257~1408) & (1664~1791) է: & (1920~2046). - Բայթերի քանակը. տվյալների բայթ(ներ)ի քանակը: Տարածքը՝ 1-8:
- Քարտեզագրման հասցե. Դարպասի ներքին հիշողության հասցեի քարտեզագրում (տասնորդական): Շրջանակ՝ 0-1999. Քարտեզագրման հասցեն կարող է լրացվել ձեռքով կամ ավտոմատ կերպով՝ ավտոմատ քարտեզագրման գործառույթի միջոցով:
- Նկարագրություն. օգտատերերը կարող են այստեղ մուտքագրել նախագծի կազմաձևման տարրերի նկարագրական նկարագրությունները: Դրանք իրականում չեն ներբեռնվում դարպասի սարքում, ինչը կարող է օգնել օգտվողներին տարբերակել իրենց գործառույթները, ինչպիսիք են «կարգավիճակը» և այլն: Եվ չեն կարող օգտագործվել:

- Ինդեքսային արժեք. ինդեքսի արժեքը սարքի օբյեկտի բառարանում (Hex, 0001H-ից մինչև FFFFH):
- Sub-Index արժեքը. Sub-Index արժեքը սարքի օբյեկտի բառարանում (Hex, 00H-ից մինչև FFH):
- Բայթերի քանակը. Բայթերի քանակը պետք է լինի 1 կամ 2 կամ 4:
- Քարտեզագրման հասցե. Դարպասի ներքին հիշողության հասցեի քարտեզագրում (տասնորդական): Շրջանակ՝ 0-1999. Քարտեզագրման հասցեն կարող է լրացվել ձեռքով կամ ավտոմատ կերպով՝ ավտոմատ քարտեզագրման գործառույթի միջոցով:
Max SDO հրամաններ ≤ 100
Մեկնաբանությունների միջերեսը ցուցադրում է համապատասխան կազմաձևման տարրի բացատրությունը: Երբ կազմաձևման տարրը «Ինդեքս
արժեքը», մեկնաբանության միջերեսը ցույց է տրված ստորև.

Փաստաթղթեր / ռեսուրսներ
 |
SST Automation GT200-MT-CO Modbus TCP Canopen Gateway [pdf] Օգտագործողի ձեռնարկ GT200-MT-CO Modbus TCP Canopen Gateway, GT200-MT-CO, Modbus TCP Canopen Gateway, TCP Canopen Gateway, Gateway |