ROBOWORKS N10 Robot Educational Programable Mobile Robot

Specifications
| Khoom npe | Lub cev muaj zog txo qis | Max Ceev | Qhov hnyav | Max Payload | Loj | Yam tsawg kawg nkaus tig Radius |
|---|---|---|---|---|---|---|
| Neeg hlau 2 | 1:27 ua | 1.3m / s | 5.92kg ib | 16, XNUMX kg | 445 * 360 * 206 hli | 0.77m ua |
| Rosbot Pro | 1:18 ua | 1.65m / s | 19.54kg ib | 35kg ib | 774 * 570 * 227 hli | 1.02m ua |
| Rosbot Plus | 1:18 ua | 2.33m / s | 35.16kg ib | 22kg ib | 766 * 671 * 319 hli | 1.29m ua |
Roj teeb Lub Neej & Lub Zog:
- Robot 2: Txog 9.5 teev (tsis muaj load), Txog 8.5 teev (tag nrho load)
- Robot Pro: Txog 4.5 teev (tsis muaj load), Txog 3 teev (tag nrho load)
- Fais fab mov: 24v 6000 mAh roj teeb + 3A tam sim no ntse charger
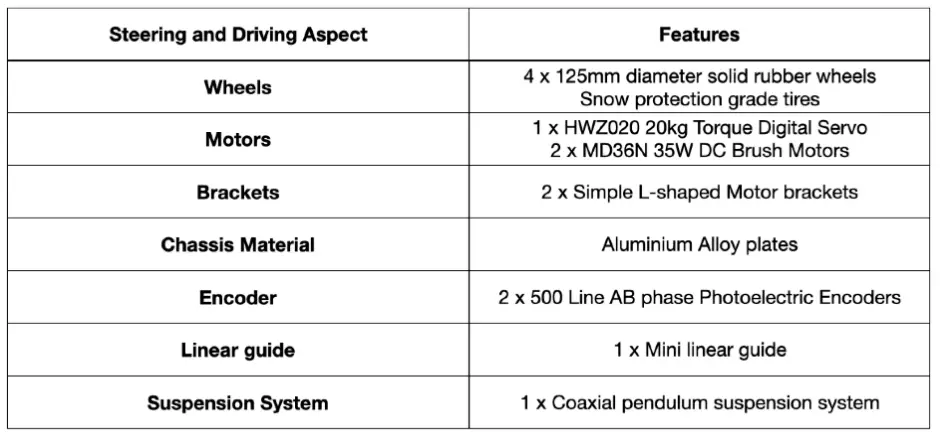
Steering & Tsav System:
Cov khoom tseem ceeb muaj xws li:
- Steering iav: S20F 20kg torque digital servo
- Log: WH060 60kg torque digital servo, 125mm txoj kab uas hla cov roj hmab log rau Rosbot 2, 150mm txoj kab uas hla cov roj hmab log rau Robot Pro thiab
- Encoder: 500 kab AB theem siab precision encoder
- Suspension System: Coaxial Pendulum Suspension System rau Robot 2, 4W Independent Suspension System rau Robot Pro thiab
- Tswj Interface: iOS & Android App ntawm Bluetooth lossis Wifi, PS2, CAN, Serial Port, USB
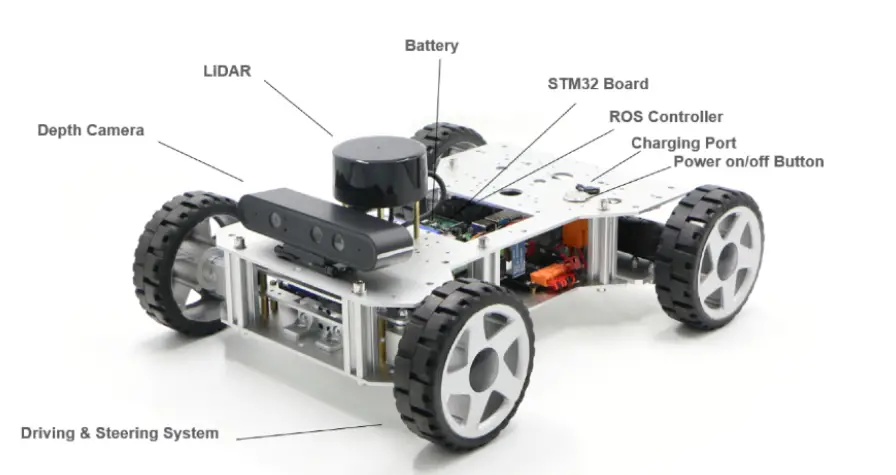
Taw qhia rau ROS Controllers:
Txhua RRobotsare nruab nrog lub koob yees duab Orbbec Astra Depth rau ntau yam kev siv suav nrog kev tswj kev taw qhia, kev taug qab pob txha, thiab 3D scanning.
STM32 Board:
Lub Rooj Tswjhwm Saib muaj STM32F103RC core nrog ntau yam kev ua haujlwm nrog rau Kev Nco, Lub Sijhawm, Rov Pib dua thiab Kev Tswj Xyuas Khoom Siv, Fais Fab DMA, Debug Hom, I / O ports, Timers, thiab Kev Sib Txuas Lus.
Cov lus nug nquag
Q: Kuv yuav them lub roj teeb li cas?
A: Siv 3A tam sim no ntse charger nrog 24v 6000mAh roj teeb kom them RRobot
Q: Lub roj teeb lub neej ntawm Rosbot Pro yog dab tsi?
A: Tus Neeg Hlau Pro muaj roj teeb lub neej txog li 4.5 teev tsis muaj kev thauj khoom thiab txog 3 teev nyob rau hauv tag nrho cov xwm txheej.
Q: Kuv puas tuaj yeem tswj Rosbot siv lub smartphone?
A: Yog lawm, koj tuaj yeem tswj Rosbot siv iOS & Android app ntawm Bluetooth lossis Wifi.
Cov Ntsiab Cai
| Varia% rau | Duab |
| Neeg hlau 2 | 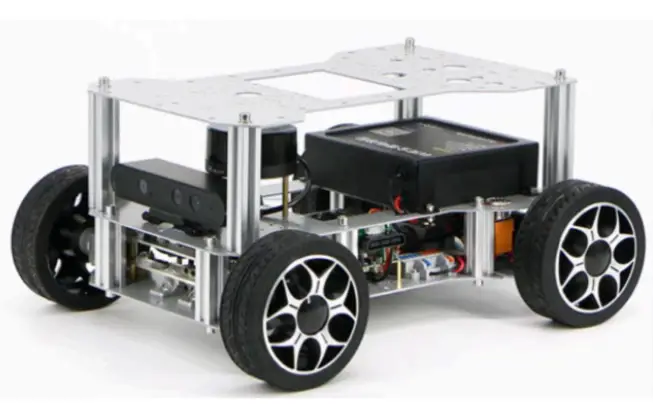 |
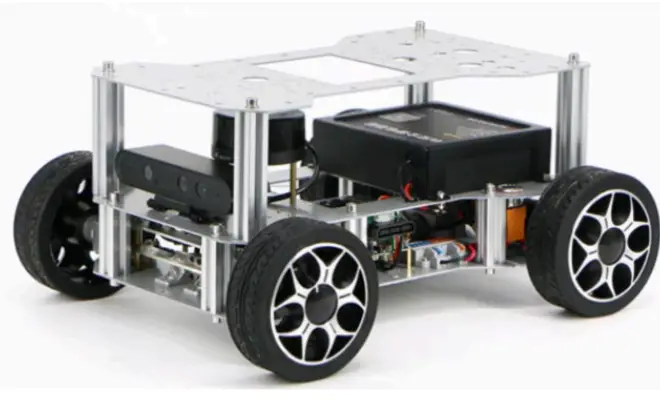
| Neeg hlau Pro |  |
| Neeg hlau Plus |  |
Khoom Specifications
|
Khoom Matrix |
 |
 |
 |
| Khoom npe | Neeg hlau 2 | Neeg hlau Pro | Neeg hlau Plus |
| Lub cev muaj zog txo qis | 1:27 ua | 1:18 ua | 1:18 ua |
| Max Ceev | 1.3m / s | 1.65m / s | 2.33m / s |
| Qhov hnyav | 5.92kg ib | 19.54kg ib | 35.16kg ib |
| Max Payload | 16, XNUMX kg | 35kg ib | 22kg ib |
| Loj | 445 * 360 * 206 hli | 774 * 570 * 227 hli | 766 * 671 * 319 hli |
| Yam tsawg kawg nkaus tig Radius | 0.77m ua | 1.02m ua | 1.29m ua |
| Roj teeb lub neej | Txog 9.5 teev (tsis muaj load), Txog 8.5 teev (tag nrho load) | Txog 4.5 teev (tsis muaj load), Txog 3 teev (tag nrho load) | |
| Fais fab mov | 24v 6000 mAh roj teeb + 3A tam sim no ntse charger | ||
| Steering iav | S20F 20kg torque digital servo | WH060 60kg torque digital servo | |
| Lub log | 125mm diameters khoom roj hmab log | 150mm diameters khoom roj hmab log | 254 hli inflatable roj hmab log |
| Encoder | 500 kab AB theem siab precision encoder | ||
| Qhov System Suspension | Coaxial Pendulum Suspension System | 4W Independent Suspension System | |
| Tswj interface | iOS & Android App ntawm Bluetooth lossis Wifi, PS2, CAN, Serial Port, USB | ||
Taw qhia ntawm ROS Controllers
Muaj 2 hom ROS Controllers muaj rau siv nrog RRobot raws li Vidia Jetson platform. Jetson Orin Nano yog haum rau kev tshawb fawb thiab kev kawm. Jetson Orin NX yog qhov zoo tshaj plaws rau kev tsim khoom thiab kev lag luam. Cov lus hauv qab no qhia txog cov kev sib txawv tseem ceeb ntawm cov tswj ntau yam muaj los ntawm Roboworks. Ob lub rooj tsavxwm tso cai rau kev suav qib siab thiab haum rau cov kev siv neeg hlau siab tshaj plaws xws li kev pom hauv computer, kev kawm tob, thiab kev npaj ua haujlwm.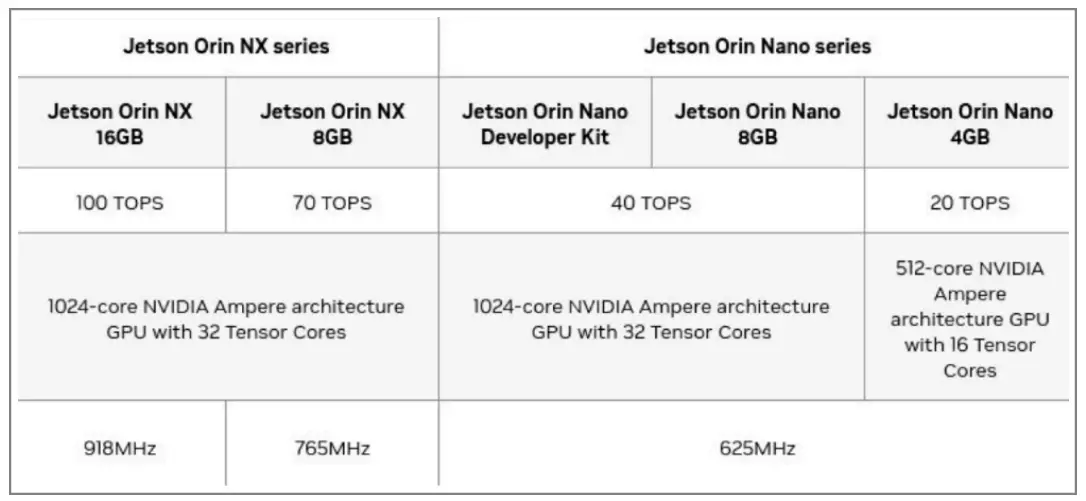
Sensing System: LiDAR & Lub koob yees duab tob
Lub Leishen LSLiDAR tau teeb tsa rau txhua qhov kev hloov pauv Rosbot nrog rau N10 lossis M10 qauv siv. Cov LLiDARs muab 3360-3360-degree scanning thiab ib puag ncig kev nkag siab thiab khav theeb ESI compact thiab lub teeb. Lawv muaj qhov sib txawv ntawm Cov Teeb Meem Tsis Txaus Siab thiab ua kom pom kev ua tau zoo ntawm cov khoom siv siab / qis thiab ua tau zoo nyob rau hauv lub teeb muaj zog. Lawv muaj qhov ntsuas qhov deb ntawm 30 meters thiab scan zaus ntawm 12Hz. LiDAR no sib txuas ua ke rau hauv cov neeg hlau, kom ntseeg tau tias txhua daim ntawv qhia thiab kev siv navigation tuaj yeem ua tiav hauv koj qhov project. Cov lus hauv qab no qhia txog cov kev qhia tshwj xeeb ntawm cov sliders: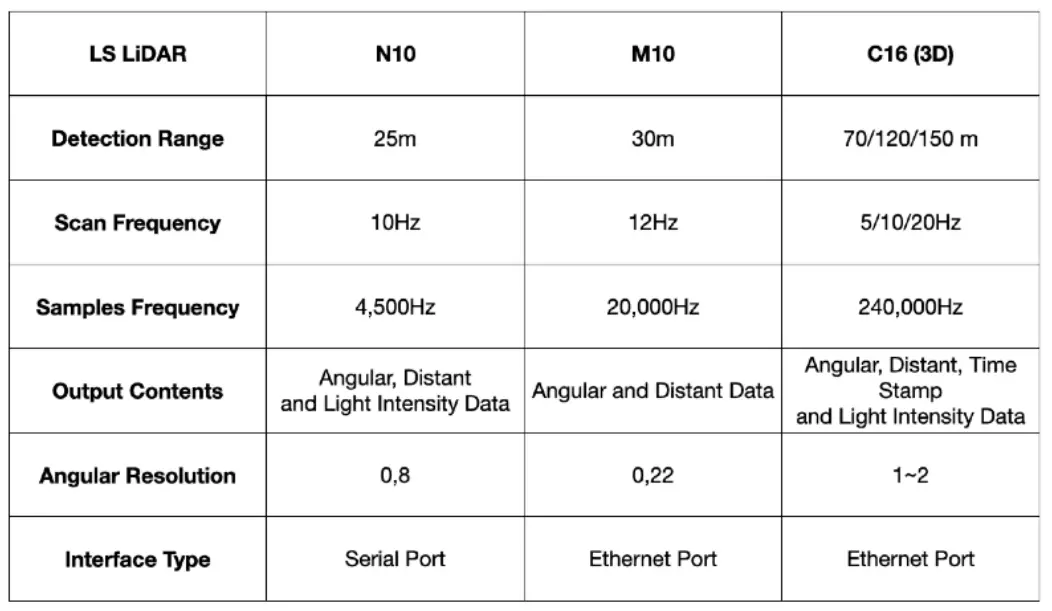
Tsis tas li ntawd, txhua tus neeg hlau tau nruab nrog lub koob yees duab Orbbec Astra Depth, uas yog lub koob yees duab RGBD. Lub koob yees duab no tau ua kom zoo rau ntau yam kev siv suav nrog kev tswj kev taw qhia, kev taug qab pob txha, 3D scanning, thiab taw tes huab kev txhim kho. Cov lus hauv qab no qhia txog cov yam ntxwv ntawm lub koob yees duab qhov tob.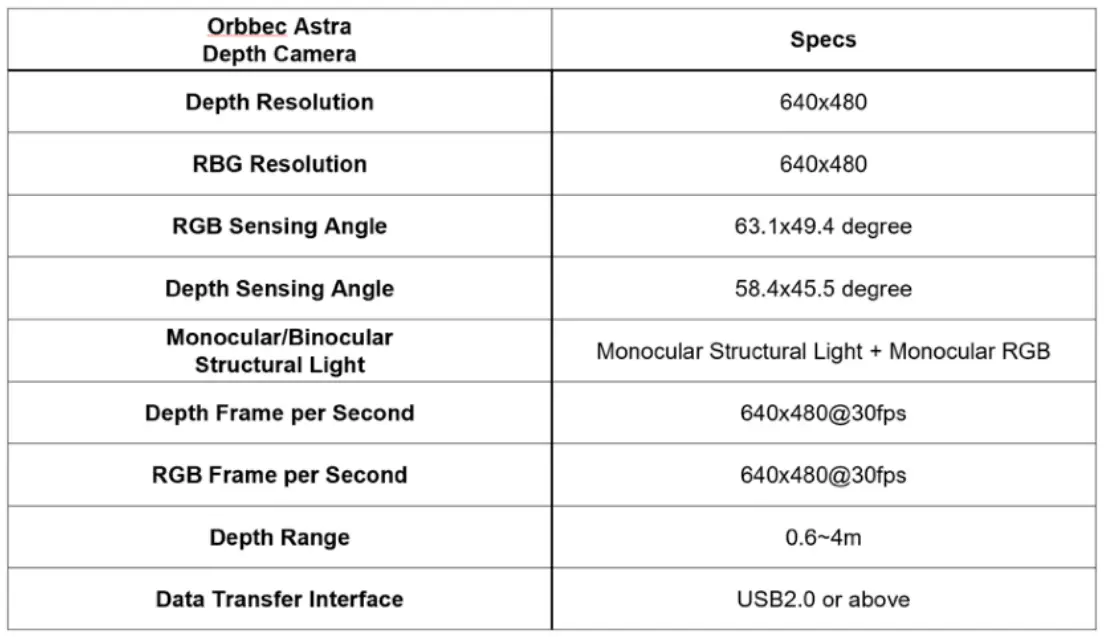
STM32 Board (Motor Control, Power Management & IMU)
STM32F103RC Board yog microcontroller siv nyob rau hauv tag nrho cov Rosbots. Nws muaj qhov ua tau zoo ARM Cortex-M3 32-ntsis RISC core ua haujlwm ntawm 72MHz zaus nrog rau kev kub ceev embedded nco. Nws ua haujlwm hauv -40 ° C txog + 105 ° C qhov kub thiab txias, haum rau txhua qhov kev siv neeg hlau hauv cov huab cua thoob ntiaj teb. Muaj cov qauv txuag hluav taws xob uas tso cai rau kev tsim cov ntawv siv hluav taws xob tsawg. Qee qhov kev siv ntawm no microcontroller muaj xws li tsav tsav, kev tswj daim ntawv thov, neeg hlau daim ntawv thov kev kho mob thiab handheld khoom, PC thiab gaming peripherals, GPS platforms, muaj kev siv, tswb system video intercoms, thiab scanners.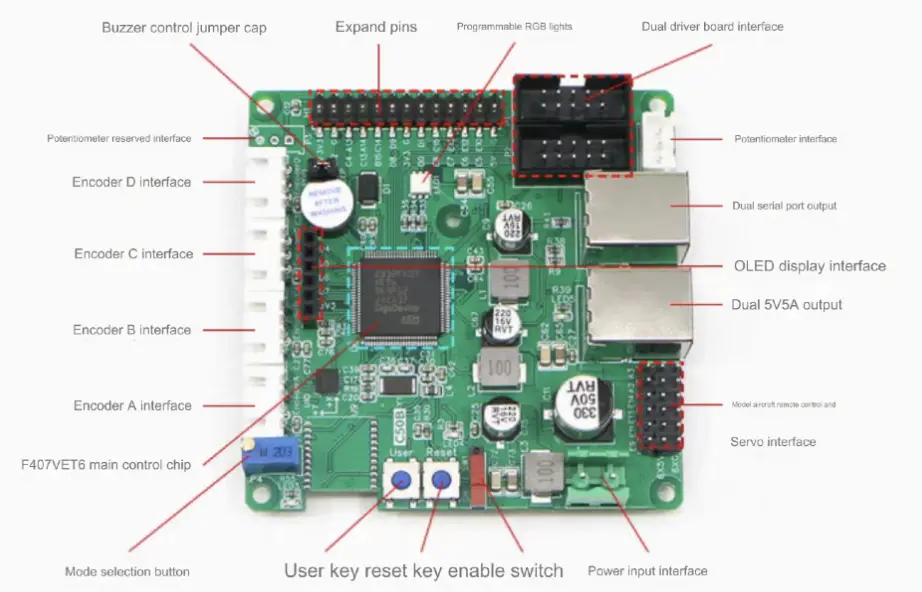
| STM32F103RC | Nta |
| Core | ARM32-ntsis Cortex -M3 CPU Max ceev ntawm 72 MHz |
| Nco | 512 KB ntawm Flash nco 64kB ntawm SRAM |
| Clock, Reset, thiab Supply Management | 2.0 rau 3.6V daim ntawv thov khoom thiab I / Os |
|
Hwj chim |
Pw tsaug zog, Nres, thiab Standby hom
V muab rau RTC thiab thaub qab sau npe BAT |
| DMA | 12-channel DMA maub los |
| Debug hom | SWB and JTAG Interfaces Cortex-M3 Embedded Trace Macrocell |
| I/O ports | 51 I / O cov chaw nres nkoj (mappable ntawm 16 sab nraud cuam tshuam vectors thiab 5V ua siab ntev) |
|
Timers |
4 × 16-ntsis timers
2 x 16-ntsis lub cev muaj zog tswj PWM timers (nrog thaum muaj xwm ceev nres) 2 x watchdog timers (ywj siab thiab Qhov rai) SysTick timer (24-ntsis down counter) 2 x 16-ntsis timers yooj yim tsav lub DAC |
|
Kev sib txuas lus Interface |
USB 2.0 puv-ceev interface SDIO interface
CAN interface (2.0B Active) |
Steering & Tsav System
Lub Steering and Driving system yog kev koom ua ke nrog kev tsim thiab tsim ntawm Robot. Nyob ntawm tus qauv yuav nws yuav yog 2-log lossis 4-log tsav, nrog rau ob qho kev xaiv tsim nyog rau ntau yam kev tshawb fawb thiab kev loj hlob. Cov log ntawm txhua tus neeg hlau yog cov roj hmab khoom nrog cov log tsheb tiv thaiv qib. Muaj coaxial pendulum ncua kev kawm ntawv, thiab ntau yam Robots yog nruab nrog shock absorbers nrog ywj siab ncua kev kawm ntawv systems, kom ntseeg tau tias lawv muaj peev xwm ua tiav navigate nyuaj struts.
Steering thiab Tsav Tsheb Technical Specifications:
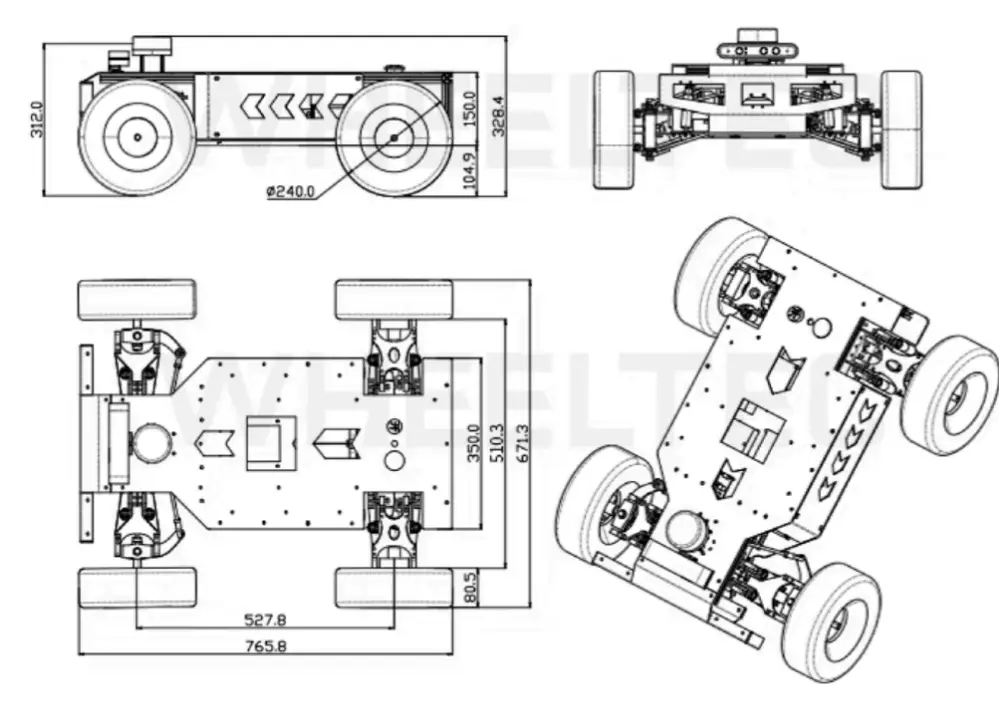
Robot Chassis Design Diagram:
Neeg hlau 2

Neeg hlau Pro
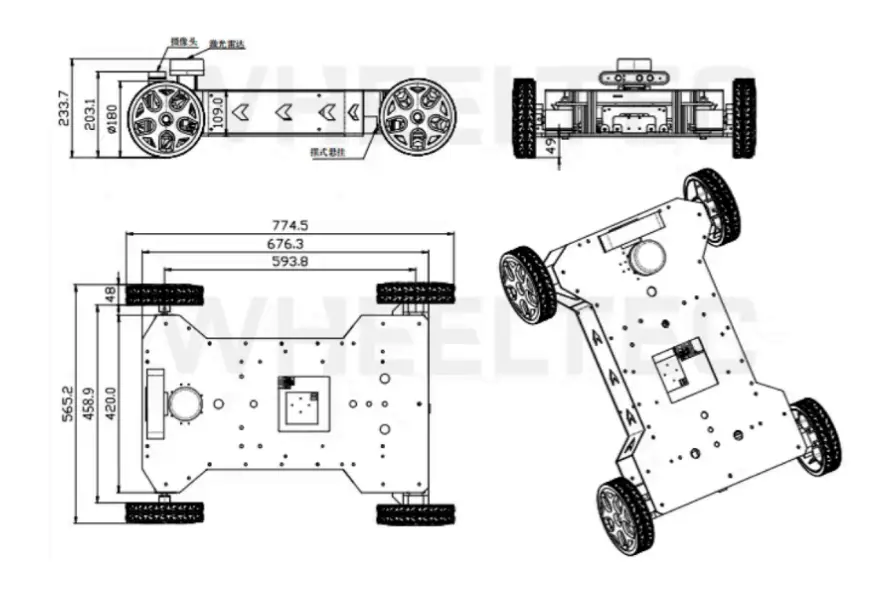
Neeg hlau Plus
Tswj fais fab
Fais fab Mag - Sib nqus LFP roj teeb:
Tag nrho cov Rosbots tuaj nrog 6000 mAh Power Mag, sib nqus LFP (Lithium Iron Phosphate) roj teeb, thiab lub hwj chim Charger. Cov neeg siv khoom tuaj yeem hloov kho lub roj teeb rau 20000 mAh ntawm tus nqi ntxiv. LFP roj teeb yog ib hom lithium-ion roj teeb uas paub txog lawv txoj kev ruaj ntseg, kev nyab xeeb, thiab lub neej ntev. Tsis zoo li cov roj teeb lithium-ion ib txwm siv, uas siv cobalt lossis npib tsib xee, LFP cov roj teeb cia siab rau cov hlau phosphate, muab cov kev xaiv zoo dua thiab tsis muaj tshuaj lom. Lawv yog cov heev resistant rau thermal runaway, txo txoj kev pheej hmoo ntawm overheating thiab hluav taws. Thaum lawv muaj lub zog qis dua piv rau lwm cov roj teeb lithium-ion, LFP roj teeb ua haujlwm tau zoo, nrog lub neej ntev, them sai dua, thiab kev ua haujlwm zoo dua hauv qhov kub thiab txias, ua rau lawv zoo tagnrho rau tsheb fais fab (EVs) thiab lub zog cia. Fais fab Mag tuaj yeem txuas rau txhua qhov chaw hlau ntawm tus neeg hlau vim nws qhov tsim qauv sib nqus. Nws ua rau swapping roj teeb sai thiab yooj yim.
Technical Specifications:
| Qauv | 6000 mAh | 20000 mAh |
| Roj teeb pob |
22.4V 6000 mAh |
22.4V 20000 mAh |
|
Cov khoom siv tseem ceeb |
Lithium Hlau Phosphate |
Lithium Hlau Phosphate |
| Cutoff Voltage | 16.5 V | 16.5 V |
|
Full Voltage |
25.55 V |
25.55 V |
| Kev them nyiaj tam sim no | 3A | 3A |
| Plhaub Khoom |
Hlau |
Hlau |
| Kev ua haujlwm tawm | 15A Nruam Tawm | 20A Nruam Tawm |
|
Plug |
DC4017MM poj niam connector (them) XT60U-F poj niam connector (tso tawm) |
DC4017MM poj niam connector (them) XT60U-F poj niam connector (tso tawm) |
|
Loj |
177 * 146 * 42 hli |
208 * 154 * 97 hli |
|
Qhov hnyav |
1.72kg ib |
4.1kg ib |
Kev tiv thaiv roj teeb
luv Circuit Court, overcurrent, overcharge, over-discharge tiv thaiv, txhawb kev them nyiaj thaum siv, built-in kev ruaj ntseg valve, nplaim taws retardant board.
Nws pib Charging Chaw nres tsheb (Power +):
Nws pib them chaw nres tsheb yog bundled nrog Rosbot 2+ qauv thiab tuaj yeem muas nyias los ua haujlwm nrog Rosbot 2, Rosbot Pro, thiab Rosbot Plus.
ROS 2 Quick Start
Thaum tus neeg hlau tau pib ua ntej, nws raug tswj los ntawm ROS los ntawm lub neej ntawd. Lub ntsiab lus, STM32 chassis controller board lees txais cov lus txib los ntawm ROS 2 Controller - Lub Jetson Orin. Kev teeb tsa thawj zaug yog nrawm thiab yooj yim, los ntawm koj lub PC host PC (Ubuntu Linux pom zoo) txuas mus rau tus neeg hlau Wi-Fi hotspot. Tus password los ntawm lub neej ntawd yog "Dongguan".Tom ntej no, txuas mus rau cov neeg hlau siv SSH ntawm Linuxterminatee l, P chaw nyob yog 192.168.0.10and 0, thiab tus password qub yog Dongguan.
Nrog lub davhlau ya nyob twg nkag mus rau tus neeg hlau, koj tuaj yeem mus rau ROS 2 chaw ua haujlwm nplaub tshev, nyob rau hauv "wheeltec_ROS 2" Ua ntej ua haujlwm cov kev sim, mus rau wheeltec_ROS 2/turn_on_wheeltec_robot/ thiab nrhiav wheeltec_udev.sh - Cov ntawv no yuav tsum tau khiav, feem ntau tsuas yog ib zaug kom paub tseeb tias qhov kev sib raug zoo. Tam sim no koj tuaj yeem sim cov neeg hlau ua haujlwm, txhawm rau tso lub ROS 2 maub los ua haujlwm, khiav: "relaunch turn_on_wheeltec_robot turn_on_wheeltec_robot.launch"
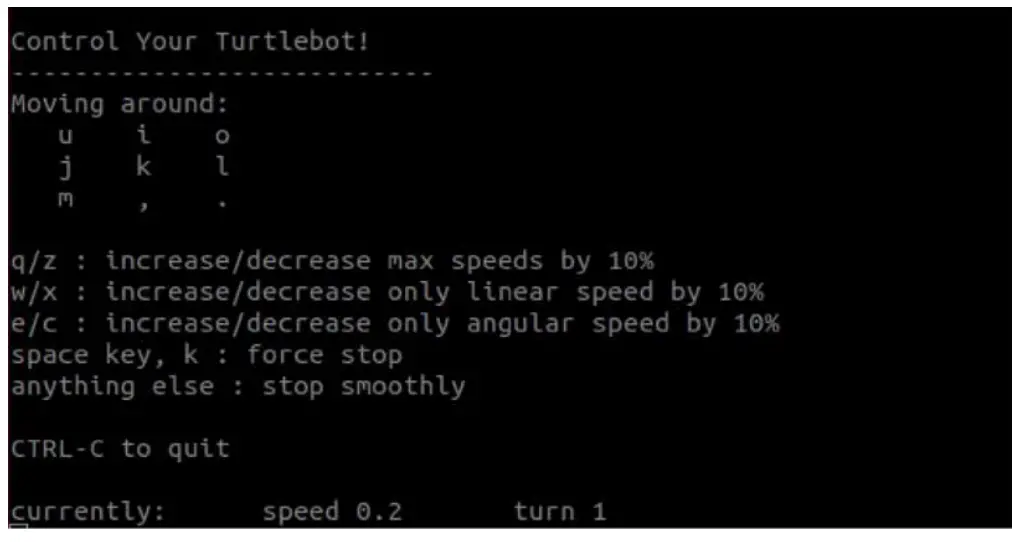
Hauv qhov thib ob lub davhlau ya nyob twg, koj tuaj yeem siv cov keyboard_teleop node kom siv tau lub chassis tswj, qhov no yog qhov hloov kho ntawm nrov ROS 2 Turtlebot ex.ample. Hom: “relaunch wheeltec_robot_rc keyboard_teleop.launch”
Pre-installed ROS 2 Humble Pob
Hauv qab no yog cov hauv qab no cov neeg siv-taw qhia cov pob khoom, thaum lwm cov pob khoom tuaj yeem muaj nyob, cov no tsuas yog kev vam khom xwb.
- tig_on_wheeltec_robot
Cov pob no yog qhov tseem ceeb rau kev ua haujlwm ntawm neeg hlau thiab kev sib txuas lus nrog tus tswj chassis. Thawj tsab ntawv "turn_on_wheeltec_robot.launch" yuav tsum tau siv rau ntawm txhua lub khau raj los teeb tsa ROS 2 thiab cthe maub los. - wheeltec_rviz2
Muaj tso tawm files mus tso viz nrog kev cai teeb tsa rau Pickerbot Pro. - wheeltec_robot_slam
SLAM Mapping thiab localization pob nrog kev cai teeb tsa rau Pickerbot Pro. - wheeltec_robot_rrt2
Kev tshawb nrhiav nrawm nrawm random ntoo algorithm - Cov pob no ua rau Pickerbot Pro npaj txoj hauv kev rau nws qhov chaw xav tau, los ntawm kev pib tshawb nrhiav cov pob. - wheeltec_robot_keyboard
Cov pob yooj yim rau kev siv cov neeg hlau ua haujlwm thiab tswj kev siv cov keyboard, suav nrog los ntawm cov chaw taws teeb tswj PC. - wheeltec_robot_nav2
ROS 2 Navigation 2 node pob. - wheeltec_lidar_ros2
ROS 2 Lidar pob rau kev teeb tsa Leishen M10 / N10. - wheeltec_joy
Lub joystick tswj pob muaj tso tawm files rau Joystick nodes. - simple_follower_ros 2
Cov khoom yooj yim thiab kab tom qab algorithms siv laser scan lossis lub koob yees duab tob. - ros2_astra_ koob yees duab
Astra tob lub koob yees duab pob nrog cov tsav tsheb thiab tso tawm files.
Cov ntsiab lus
Robot yog tsim los rau ROS (Robot Operating System) cov neeg tsim khoom, cov kws qhia ntawv, thiab cov tub ntxhais kawm. Lub plawv ntawm Rosbot yog tag nrho cov programmable software moj khaum thiab configurable hardware architecture raws li lub nrov tshaj plaws neeg hlau platform - ROS.
Cov neeg hlau tuaj nyob rau hauv peb pawg:
- Neeg hlau 2 – Haum rau ROS cov pib tshiab thiab cov phiaj xwm nyiaj tsawg.
- Neeg hlau Pro – Haum rau ROS cov neeg tsim khoom thiab cov kws qhia ntawv uas xav tau ntau yam txheej txheem rau kev tsim qauv sai lossis kev qhia.
- Rosbot Ntxiv - Qhov no yog 4WD version ntawm Rosbot nrog Independent Suspension Systems. Pawg no yog qhov loj txaus los txiav txim siab rau kev lag luam thiab kev lag luam loj hlob. Cov neeg hlau los nrog cov ROS nrov xws li:
- Jetson Orin Nano
- Jetson Orin NX
Npaj Los ntawm: Wayne Liu, Reilly Smithers & Tara Hercz 30 Cuaj hlis 2024
Version #: 20240930
Cov ntaub ntawv / Cov ntaub ntawv
 |
ROBOWORKS N10 Robot Educational Programable Mobile Robot [ua pdf] Tus neeg siv phau ntawv N10 Robot Educational Programable Mobile Robot, N10, Robot Educational Programable Mobile Robot, Educational Programable Mobile Robot, Programable Mobile Robot, Txawb Neeg Hlau, Neeg Hlau |