![]() Automatización GT200-MT-CO Modbus TCP Canopen Gateway
Automatización GT200-MT-CO Modbus TCP Canopen Gateway
Manual de usuario
Información importante
Aviso
Os datos e exampOs ficheiros deste manual non se poden copiar sen autorización. SST Automation resérvase o dereito de actualizar o produto sen avisar aos usuarios.
O produto ten moitas aplicacións. Os usuarios deben asegurarse de que todas as operacións e resultados están de acordo coa seguridade dos campos relevantes e que a seguridade inclúe leis, regras, códigos e estándares.
Dereitos de autor
Copyright © 2023 by SST Automation Co., Ltd. Todos os dereitos reservados.
Marca comercial
![]() é a marca rexistrada de SST Automation.
é a marca rexistrada de SST Automation.
Información de contacto de soporte técnico www.sstautomation.com
www.sstcomm.com Correo electrónico: support@sstautomation.com
Produto rematadoview
1.1 Función do produto
A pasarela admite a conexión de dispositivos CANopen á rede Modbus TCP, pode realizar a comunicación de datos entre varios dispositivos CANopen e varios clientes Modbus TCP.
1.2 Característica do produto
- Admite unha canle CAN 2.0A.
- Interface CAN: illamento fotoeléctrico de 3KV.
- Actúa como un mestre CAN open, admite 100 comandos PDO e 100 SDO.
- Admite ata 8 clientes Modbus TCP.
- Admite 2 canles, porto de rede 10M/100M.
1.3 Especificacións técnicas
[1] Interface Ethernet:
- Admite 2 portos de rede 10M/100M (negociación automática) cun interruptor integrado.
- Admite o protocolo Modbus TCP e funciona como servidor Modbus TCP.
- Admite a conexión de ata 8 clientes Modbus TCP.
- Admite códigos de función: 03H, 04H, 06H, 10H.
- O enderezo de inicio do rexistro de entrada é 0 (almacena a trama CAN recibida) e admite o código de función 04H.
- O enderezo de inicio do rexistro de saída é 0 (almacena as tramas CAN que deben enviarse) e admite os códigos de función 03H, 06H e 16H.
- Admite o código de función 03 ou 04 para ler a área de datos de entrada/saída.
- Admite a configuración estática do enderezo IP e DHCP.
[2] Velocidade de comunicación: velocidade de transmisión CAN: 10 kbit/s, 20 kbit/s, 50 kbit/s, 100 kbit/s, 125 kbit/s, 250 kbit/s, 500 kbit/s, 1 Mbps.
[3] A interface CAN admite o protocolo CAN2.0A.
[4] Cumpre DS-301 V4.02 e CiA Draft Recommendation 303. - Admite un máximo de 8 bytes TPDO e RPDO.
- Admite un máximo de 100 comandos PDO e un máximo de 100 comandos SDO.
- Admite descarga rápida SDO e carga rápida SDO.
- O usuario pode configurar o COB-ID de TPDO e RPDO ou usar o COBID predeterminado.
- Admite Clear Data Time para a función TPDO.
- Admite a función de tempo de espera de resposta SDO.
- Admite a xestión de NMT.
- Admite a función SYNC.
- Admite a función de vida de garda (protocolos de garda e latido do corazón).
- Admite a función de envío de ciclos RPDO.
- Admite o retardo mestre CANopen para a función de inicio.
- Admite a función de estado de control.
- Función configurable do comando NMT_RESET.
[5] Temperatura de funcionamento: -40 °F~140 °F (-20 °C a 60 °C). Humidade relativa: 5% a 95% (sen condensación).
[6] Alimentación: 24VDC (11V~30V), 80mA (24VDC).
[7] Dimensións externas (ancho x alto x prof.): 1.0 mm x 4.0 mm x 3.6 mm.
[8] Instalación: carril DIN de 1.38 in (35 mm);
[9] Grado de protección: IP20.
1.4 Produtos relacionados
Os produtos relacionados inclúen:
- GT100-CO-RS
- GT200-CO-RS
- GT200-EI-CO
- GT200-PN-CO
- GT200-DP-CO
Para obter máis información sobre produtos relacionados, visite o noso SST Automation websitio: www.sstautomation.com
1.5 Historial de revisións
| Revisión | Data | Capítulo | Descrición |
| V3.0 | 02/27/2022 | TODOS | Nova versión |
Descricións de hardware
 Notas: Esta imaxe é só para referencia. A aparencia do produto está suxeita ao produto real.
Notas: Esta imaxe é só para referencia. A aparencia do produto está suxeita ao produto real.
2.2 Indicadores LED
| LED | Estado | Descrición do estado |
| É | Verde encendido | Estableceuse a conexión Modbus TCP |
| Parpadeante verde | Non se establece a conexión Modbus TCP | |
| Vermello parpadeando | Tempo de espera da conexión Modbus TCP | |
| Laranxa parpadeante (parpadeando alternativamente co SNC) | Estado da configuración | |
| Laranxa parpadeante | Estado de inicio | |
| (NS | Vermello activado | AUTOBÚS DESACTIVADO |
| Luz vermella acesa periodicamente | O contador de erros do controlador CAN alcanza ou supera o valor de garda (demasiados fotogramas de erro) | |
| Verde encendido | O nodo está en modo de execución | |
| Laranxa parpadeando unha vez e apagado | Estado de inicio | |
| Laranxa parpadeante (parpadeando alternativamente co ENS) | Estado da configuración | |
| Laranxa activada | Xestión de NMT. Agardando polo BOOTP de todos os escravos (usado cando NMT está activado) |
2.3 Interruptor/botón de configuración
O interruptor DIP úsase para configurar o modo de funcionamento do dispositivo.![]()
| Función (Bit 1) | Modo (bit 2) | Descrición |
| Reservado | Moitas veces | Modo en execución, prohibe ler e escribir datos de configuración |
| Desactivado | On | Modo de configuración, con enderezo IP fixo 192.168.0.10, só pode ler e escribir datos de configuración |
| on | On | Modo BootLoader, con enderezo IP fixo 192.168.0.10 |
Notas: Reinicie GT200-MT-CO despois de restablecer a configuración para que a configuración teña efecto.
2.4 Interface
2.4.1 Interface de alimentación
| Pin | Función |
| 1 | Terra de alimentación (24 V CC) |
| 2 | NC (non conectado) |
| 3 | +24 V CC |
2.4.2 Interface Ethernet A interface Ethernet usa a interface RJ45, segue o estándar IEEE802.3u 100BASE-T, con negociación automática 10/100M. O seu pinout (sinal Ethernet estándar) defínese como segue:
A interface Ethernet usa a interface RJ45, segue o estándar IEEE802.3u 100BASE-T, con negociación automática 10/100M. O seu pinout (sinal Ethernet estándar) defínese como segue:
| Pin | Descrición do sinal |
| 1 | TXD+, Tranceive Data+, Saída |
| 2 | TXD-, Tranceive Data-, Saída |
| 3 | RXD+, recibir datos+, entrada |
| 6 | RXD-, recibir datos-, entrada |
| 4,5,7,8 | (reservado) |
 A pasarela usa un conector aberto de tres pinos no lateral de CAN:
A pasarela usa un conector aberto de tres pinos no lateral de CAN:| Pin | Conexión |
| 1 | CAN-L |
| 2 | Escudo (opcional) |
| 3 | CAN-H |
O terminal CAN está equipado cun interruptor de resistencia de terminal de 120Ω ; Cando o interruptor está acendido, a resistencia do terminal está conectada; cando se apaga o interruptor, desconéctase a resistencia do terminal.
Tamaño (ancho * alto * profundidade): 1.0 in * 4.0 in * 3.6 in (25 mm * 100 mm * 90 mm)
 2.6 Método de instalación
2.6 Método de instalaciónUsando un carril DIN de 1.4 mm (35").

Guía de inicio rápido
- Asegúrate de que o GT200-MT-CO estea no modo operativo adecuado que permite a configuración. Recoméndase configurar a pasarela no modo de configuración (conmutadores de configuración Bit 1 OFF e Bit 2 ON) entón a IP da pasarela fixarase en 192.168.0.10.
- Use un cable Ethernet para conectar o GT200-MT-CO ao PC.
- Conecte os instrumentos CAN conectando os pines 1 e 3 como mínimo.
- Conecte a fonte de alimentación e, a continuación, acende o dispositivo.
- Executa o software SST-MTC-CFG para iniciar o proceso de configuración.
- No software de configuración, configure a taxa de transmisión CAN, o ID de nodo e o enderezo IP. (Consulte os capítulos 4.5 e 4.7.4 para máis detalles).
- Despois de configurar a pasarela, desactive o interruptor DIP de configuración Bit 2. Acende de novo e o módulo pasará ao modo de execución.
Os usuarios poden conectar a pasarela ao PC a través do porto RJ-45. Os usuarios poden usar SST-MTC-CFG para terminar de configurar GT200-MT-CO facilmente, incluíndo o enderezo IP, a taxa de baudios do porto CANopen e os comandos CANopen.
Hai dúas formas de configurar o enderezo IP: Asignar manualmente e DHCP. Asignar manualmente significa que o usuario establece manualmente a IP no estado de configuración. Cando o usuario elixe usar DHCP, o usuario debe usar o router Ethernet (gateway, hub, switch) para asignar a IP no estado en execución.
3.3.1 Modo de intercambio de datos
O modo de comunicación entre CAN open e Ethernet/IP é asíncrono, como se mostra a continuación:
 "Datos 1" mostra o proceso de transferencia de datos de Modbus TCP a CAN; "Datos 2" mostra o proceso de transferencia de datos de CAN a Modbus TCP.
"Datos 1" mostra o proceso de transferencia de datos de Modbus TCP a CAN; "Datos 2" mostra o proceso de transferencia de datos de CAN a Modbus TCP.Unha saída de E/S Modbus TCP pode transportar 0 a múltiples datos de trama CAN. Despois de que a pasarela o reciba, envía a trama aberta CAN e, a continuación, empaqueta a trama de resposta CANopen recibida na entrada de E/S e envíao ao Modbus TCP Clinet. TPDO e RPDO aplican o modo produtor/consumidor, e moitas veces úsanse nas ocasións con altos requisitos de velocidade; Cargar SDO e Descargar SDO aplica o modo cliente/servidor, o modo pode garantir a seguridade dos datos e úsase a miúdo en ocasións con esixencia de baixa velocidade.
GT200-MT-CO admite a función NMT sinxela: admite o inicio sinxelo de todas as funcións escravas CAN open. GT200-MT-CO admite a función Guard life e a función SYNC.
Instrucións de software
Fai dobre clic na icona do software no escritorio despois da instalación para entrar na interface de configuración:
 4.1 Barra de ferramentas
4.1 Barra de ferramentasA barra de ferramentas móstrase como a continuación:
 A función da barra de ferramentas: Novo, Gardar, Abrir, Engadir nodo, Eliminar nodo, Engadir comando, Eliminar comando, Cargar, Descargar, AutoMap, Conflito e Exportar EXCEL.
A función da barra de ferramentas: Novo, Gardar, Abrir, Engadir nodo, Eliminar nodo, Engadir comando, Eliminar comando, Cargar, Descargar, AutoMap, Conflito e Exportar EXCEL.| Novo: crea un novo proxecto de configuración | |
| Gardar: gardar a configuración actual | |
| Abrir: abra un proxecto de configuración | |
| Engadir nodo: Engade un nodo CANopen | |
| Eliminar nodo: elimina un nodo CANopen | |
| Engadir comando: Engade un comando CANopen | |
| Comando Eliminar: elimina un comando CANopen | |
| Cargar: le a información de configuración do módulo e móstraa no software | |
| Descargar: Descarga a configuración file á porta de entrada | |
| AutoMap: úsase para calcular automaticamente o enderezo de memoria mapeado sen conflito por cada comando | |
| Confict: para comprobar se hai algún conflito cos comandos configurados no búfer de datos da memoria da pasarela. | |
| Exportar EXCEL: exporta a configuración actual ao disco duro local, gardada como .xls file. | |
| Depuración: reservado |
Novos parámetros inicializados para abrir a interface de configuración:
Nota: A nova función úsase principalmente para a configuración fóra de liña, é dicir, pode usar os parámetros de inicialización para abrir a interface de configuración cando non hai equipos.
 4.3 Abrir e gardar a configuración
4.3 Abrir e gardar a configuraciónSeleccione "Abrir", pode abrir o proxecto de configuración que gardou.
 Seleccione "Gardar" ou "Gardar como", pode gardar o proxecto de configuración con .chg como extensión.
Seleccione "Gardar" ou "Gardar como", pode gardar o proxecto de configuración con .chg como extensión. Fai clic na icona
Fai clic na icona Nota: Despois de gardar os parámetros como a file, os datos no file pode ser modificado polo usuario, pero asegúrese da corrección dos datos modificados, se non, os datos incorrectos procesaranse segundo o valor predeterminado.
Nota: Despois de gardar os parámetros como a file, os datos no file pode ser modificado polo usuario, pero asegúrese da corrección dos datos modificados, se non, os datos incorrectos procesaranse segundo o valor predeterminado.Non cambies as palabras clave dos datos, non engadas espazos.
Seleccione "Cargar", lerá as configuracións da pasarela e a interface móstrase a continuación:
 Seleccione o dispositivo, faga clic en Iniciar sesión.
Seleccione o dispositivo, faga clic en Iniciar sesión. Fai clic en Cargar.
Fai clic en Cargar. Seleccione "Cargar", lerá a configuración aplicada desde a pasarela e a interface móstrase a continuación:
Seleccione "Cargar", lerá a configuración aplicada desde a pasarela e a interface móstrase a continuación: Seleccione "Descargar", descargará as configuracións na pasarela e a interface móstrase como a continuación:
Seleccione "Descargar", descargará as configuracións na pasarela e a interface móstrase como a continuación: Nota: O enderezo IP está fixado en 192.168.0.10 no modo de configuración GT200-MT-CO.
Nota: O enderezo IP está fixado en 192.168.0.10 no modo de configuración GT200-MT-CO.A interface de configuración Modbus TCP móstrase a continuación:
 Nos parámetros anteriores, a información detallada móstrase a continuación:
Nos parámetros anteriores, a información detallada móstrase a continuación:Modo Asignar IP: Asignación manual e DHCP opcional.
Enderezo IP: enderezo IP de GT200-MT-CO
Máscara de subrede: máscara de subrede de GT200-MT-CO
Pasarela predeterminada: o enderezo da pasarela GT200-MT-CO está situado na LAN
Comprobar ID da unidade: Comprobar o identificador da unidade: Activado ou Desactivado. Cando o abra, pode configurar a pasarela como o enderezo da estación do servidor Modbus TCP
ID da unidade: a pasarela como enderezo da estación do servidor Modbus TCP. O ID de unidade está activado cando "Comprobar ID de unidade" está activado, o intervalo: de 1 a 247, o valor predeterminado é 1.
Código de función para ler datos: o código de función 04/03 le os datos de entrada: o cliente Modbus TCP pode seleccionar o código de función 04 ou 03 e ler os datos do dispositivo CANopen recollidos a través da pasarela.
4.6 Parámetros de configuración de CAN open
Configure os parámetros de rede CANopen, incluíndo a velocidade en baudios de CAN open, ID de nodo de apertura CAN, tempo de espera de resposta SDO, habilitar NMT, tempo de borrado de datos para TPDO, SYNC, vida útil, ciclo para transmisión RPDO, 5 atraso de arranque, estado de control e monitorización, saída Procesamento de datos, o ciclo para a transmisión SDO, o comando SDO de envío lateral de MT, os intentos de falla do comando SDO e o tempo de atraso de sondeo SDO. A interface de configuración CANopen móstrase a continuación:
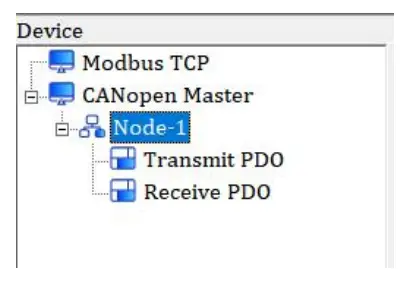
 4.7 Dispositivo View Interface
4.7 Dispositivo View Interface4.7.1 Dispositivo View Interface
 4.7.2 Modo de funcionamento
4.7.2 Modo de funcionamentoAdmite tres tipos de modos de operación: menú de edición, barra de ferramentas de edición e menú de edición facendo clic co botón dereito.
 4.7.3 Tipos de operación
4.7.3 Tipos de operación- Engadir nodo: prema co botón esquerdo en Redes CANopen ou nos nodos existentes e, a continuación, realice a operación de engadir un novo nodo. A continuación, haberá un novo nodo chamado "Novo nodo" na Rede CANopen (O nodo recén engadido non ten enderezo. Os nós sen enderezos non son válidos. Introduza o enderezo do nodo. O enderezo do nodo non se pode repetir).
- Eliminar nodo: prema co botón esquerdo sobre o nodo que se quere eliminar e, a continuación, realice a operación de eliminación de nodo. O nodo e todos os comandos eliminaranse. Engadir comandos: prema co botón esquerdo sobre o nodo e, a continuación, realice a operación de engadir comando para engadir un comando para o nodo. O cadro de diálogo de selección de comandos aparecerá para que os usuarios elixan. Móstrase como a continuación:
Comandos: Cargar SDO->ENet In, Descargar SDO <- ENet Out, Transmitir PDO-> ENet In, Recibir PDO<- ENet Out - Seleccionar comandos: fai dobre clic nun comando.

- Eliminar comando: fai clic co botón esquerdo nun comando e poderás eliminalo.
- Copiar nodo: prema co botón esquerdo no nodo existente, escolla o nodo e executa a operación de copiar nodos (incluír todos os comandos baixo o nodo).
- Pegar nodo: prema co botón esquerdo e elixe calquera nodo existente, executa a operación de pegar un nodo. Despois, baixo a árbore de rede CANopen podes ver o novo nodo (incluír todos os comandos baixo o nodo). Os parámetros do novo nodo son a configuración predeterminada, é necesario restablecer.
Os parámetros configurables móstranse a continuación:
Velocidade en baudios de apertura CAN, ID de nodo de apertura CAN, tempo de espera de resposta SDO, activación de NMT, NMT_RESET, tempo de borrado de datos para TPDO, SYNC, vida útil, ciclo de transmisión RPDO, atraso de inicio, estado de control e monitorización, procesamento de datos de saída, O ciclo para a transmisión SDO, os intentos de falla de comando SDO e o tempo de atraso de sondeo SDO.
A interface de configuración CAN open móstrase a continuación:
 Pódese seleccionar a taxa de baudios aberta: 50K, 100K, 125K, 250K, 500K, 1M; o valor predeterminado é 250K
Pódese seleccionar a taxa de baudios aberta: 50K, 100K, 125K, 250K, 500K, 1M; o valor predeterminado é 250KID de nodo de canoa: de 1 a 127, o valor predeterminado é 127
Tempo de espera de resposta SDO: este parámetro baséase en 10 milisegundos. O intervalo do valor do parámetro é de 1 a 200. O valor predeterminado é 200
Activar NMT: se deben iniciar todos os nodos CAN abertos na rede ou non, o valor predeterminado é desactivado
0: non use a función;
Valor distinto de cero: use a función de tempo de espera e o valor de tempo de espera é un múltiplo integral distinto de cero de 10 milisegundos, o intervalo é de 0 a 200, o valor predeterminado é 0
SYNC: ciclo de sincronización
0: Non use a función de ciclo de sincronización
Valor distinto de cero: use a función e o ciclo de sincronización é un múltiplo integral distinto de cero de 1 milisegundos, o intervalo é de 0 a 6000, o valor predeterminado é 0.
O ciclo para a transmisión RPDO: o ciclo para a transmisión RPDO baséase en 1 ms. Cero significa usar o modo de cambio de saída de valor; distinto de cero significa enviar todos os RPDO segundo o ciclo. O ciclo de envío é igual ao valor de configuración, o valor predeterminado é 0. O intervalo: 0~60000. Nota: Este parámetro e a velocidade en baudios CAN son relevantes cos números de comando RPDO. Se o sistema se centra no rendemento en tempo real, recoméndase establecer este valor en 0, é dicir, cambiar o valor de saída.
Retardo ao inicio: valor de atraso
0: non use a función;
Valor distinto de cero: use a función e o valor do retardo é un múltiplo integral distinto de cero de 1 milisegundos; o intervalo é
0 a 60000, o valor predeterminado é 0.
Estado de control e monitorización: os dous primeiros bytes do búfer de saída úsanse como byte de estado do escravo CANopen. O primeiro byte destes dous bytes é o enderezo de salvamento CANopen, e o segundo byte é o comando que controla o escravo CANopen (por exemplo, entrar no estado previo á operación, entrar no estado de operación, entrar no estado de parada, restablecer o nodo, restablecer a aplicación, restablecer a comunicación, etc. etc.). Seleccionando "Activar", SST-ETC-CFG reducirá dous bytes ao calcular automaticamente o enderezo de mapeo e estes dous bytes gárdanse na parte frontal do búfer, o valor predeterminado é "Desactivar".
Clear significa poñer os datos a cero;
Manter significa manter os datos sen cambios antes de que o TCP estea desactivado.
O ciclo para a transmisión SDO: o ciclo para a transmisión SDO, baséase en 1 ms. Cero significa que a descarga SDO usa o modo de cambio de saída de valor, a carga SDO usa o modo de lectura sen parar de datos escravos; distinto de cero significa enviar todos os SDO segundo o ciclo. O ciclo de envío é igual ao valor de configuración, o valor predeterminado é 0. O intervalo: 0 a 60000.
Intentos de fallo do comando SDO: a estación mestra CANopen envía unha solicitude SDO, pero non recibe unha resposta da estación do dispositivo. A estación mestra enviará repetidamente esta solicitude SDO. O número de repeticións é o valor definido por este parámetro, rango: 0 a 5, predeterminado: 0.
Tempo de atraso de sondeo SDO: a estación mestra CANopen envía a solicitude SDO e recibe a resposta da estación do dispositivo. A estación mestra ten que atrasar un período de tempo antes de enviar a seguinte solicitude SDO. Este período de tempo é o tempo de atraso de sondeo SDO. Unidade: ms, intervalo: 0 a 60000, predeterminado: 0.
4.7.5 Configuración de comandos
Na interface do dispositivo, faga clic co botón esquerdo nun comando e, a continuación, a interface de configuración móstrase como a continuación:

- Enderezo do dispositivo CANopen: enderezo do dispositivo CANopen, o intervalo é de 1 a 127.
- COB-ID: o CAN ID (decimal) de CANopen PDO:
Valor predeterminado do comando Transmit PDO: 384(0x180) + ID de nodo ou 640(0x280) + ID de nodo ou 896 (0x380) + ID de nodo ou 1152(0x480) + ID de nodo.
Valor predeterminado de Receive PDO: 512(0x200) + ID de nodo ou 768(0x300) + ID de nodo ou 1024 (0x400) + ID de nodo ou 1280 (0x500) + ID de nodo.
Se os usuarios queren encher un valor personalizado, enche directamente o valor necesario cando se selecciona Elemento personalizado no cadro de opcións despregable. O intervalo é (1~127) & (257~1408) & (1664~1791) & (1920~2046). - Número de bytes: o número de bytes de datos. Rango: 1~8.
- Enderezo de mapeo: enderezo de mapeo do enderezo de memoria interna da pasarela (decimal). Rango: 0-1999. O enderezo de mapeo pódese cubrir manualmente ou automaticamente mediante a función de mapeo automático.
- Descrición: os usuarios poden introducir aquí descricións descritivas dos elementos de configuración do proxecto. Estes non se descargan realmente no dispositivo de pasarela, o que pode axudar aos usuarios a distinguir as súas funcións, como o "estado", etc. E non se poden usar.

- Valor de índice: valor de índice no dicionario de obxectos do dispositivo (hexadecimal, de 0001H a FFFFH).
- Valor do subíndice: valor do subíndice no dicionario de obxectos do dispositivo (hexadecimal, 00H a FFH).
- Número de bytes: Número de bytes: debe ser 1 ou 2 ou 4.
- Enderezo de mapeo: enderezo de mapeo do enderezo de memoria interna da pasarela (decimal). Rango: 0-1999. O enderezo de mapeo pódese cubrir manualmente ou automaticamente mediante a función de mapeo automático.
Comandos SDO máximos ≤ 100
A interface de comentarios mostra a explicación do elemento de configuración relevante. Cando o elemento de configuración é "Índice
valor", a interface de comentarios móstrase como a continuación:

Documentos/Recursos
 |
SST Automation GT200-MT-CO Modbus TCP Canopen Gateway [pdfManual do usuario GT200-MT-CO Pasarela Modbus TCP Canopen, GT200-MT-CO, Pasarela Modbus TCP Canopen, Pasarela TCP Canopen, Pasarela |