Raspberry Pi SC1631 Raspberry Mikrocontroller

Produktspezifikationen
- Modell: RP2350
- Gehäuse: QFN-60
- Interner Flash-Speicher: Nein
- Bandtage Regler: On-Chip-Schaltregler
- Reglerpins: 5 (3.3 V Eingang, 1.1 V Ausgang, VREG_AVDD, VREG_LX, VREG_PGND)
Anweisungen zur Produktverwendung
- Kapitel 1: Einführung
- Die RP2350-Serie bietet im Vergleich zur RP2040-Serie verschiedene Gehäuseoptionen. Die RP2350A und RP2354A werden in einem QFN-60-Gehäuse mit bzw. ohne internen Flash-Speicher geliefert, während die RP2354B und RP2350B in einem QFN-80-Gehäuse mit bzw. ohne Flash-Speicher geliefert werden.
- Kapitel 2: Macht
Die RP2350-Serie verfügt über eine neue On-Chip-SchaltvoltagDer Regler mit fünf Pins. Dieser Regler benötigt für den Betrieb externe Komponenten, bietet aber im Vergleich zum Linearregler der RP2040-Serie eine höhere Energieeffizienz bei höheren Lastströmen. Achten Sie auf die Rauschempfindlichkeit des VREG_AVDD-Pins, der die analogen Schaltkreise versorgt.
Häufig gestellte Fragen (FAQ)
- F: Was ist der Hauptunterschied zwischen RP2350A und RP2350B?
A: Der Hauptunterschied liegt im Vorhandensein eines internen Flash-Speichers. RP2350A hat keinen internen Flash-Speicher, RP2350B hingegen schon. - F: Wie viele Pins hat der VoltagWelche Regler hat die Serie RP2350?
A: Das BdtagDer Regler der RP2350-Serie verfügt über fünf Pins.
Hardware-Design mit RP2350 Verwendung von RP2350-Mikrocontrollern zum Bau von Platinen und Produkten
Kolophon
- © 2023-2024 Raspberry Pi Ltd
- Diese Dokumentation ist lizenziert unter Creative Commons Namensnennung-Keine Bearbeitung 4.0 International (CC BY-ND). Build-Datum: 2024-08-08 Build-Version: c0acc5b-clean
- Rechtlicher Hinweis
- TECHNISCHE DATEN UND ZUVERLÄSSIGKEITSDATEN FÜR RASPBERRY PI-PRODUKTE (EINSCHLIESSLICH DATENBLÄTTER) IN DER VON ZEIT ZU ZEIT GEÄNDERTEN FASSUNG („RESSOURCEN“) WERDEN VON RASPBERRY PI LTD („RPL“) „WIE BESEHEN“ BEREITGESTELLT UND JEGLICHE AUSDRÜCKLICHE ODER STILLSCHWEIGENDE GARANTIEN, EINSCHLIESSLICH, ABER NICHT BESCHRÄNKT AUF STILLSCHWEIGENDE GARANTIEN DER MARKTGÄNGIGKEIT UND EIGNUNG FÜR EINEN BESTIMMTEN ZWECK, SIND AUSGESCHLOSSEN. Soweit gemäß geltendem Recht zulässig, ist RPL in keinem Fall für direkte, indirekte, beiläufig entstandene, besondere, exemplarische oder Folgeschäden (einschließlich, aber nicht beschränkt auf die Beschaffung von Ersatzwaren oder -dienstleistungen, Nutzungsausfall, Datenverlust, entgangenen Gewinn oder Geschäftsunterbrechung) haftbar, gleich auf welche Weise diese verursacht wurden und auf welcher Grundlage auch immer die Haftung beruht, sei es aufgrund von Vertragsbruch, verschuldensunabhängiger Haftung oder unerlaubter Handlung (einschließlich Fahrlässigkeit oder anderweitig), die in irgendeiner Weise aus der Verwendung der Ressourcen entstehen, selbst wenn auf die Möglichkeit solcher Schäden hingewiesen wurde.
- RPL behält sich das Recht vor, jederzeit und ohne weitere Ankündigung Erweiterungen, Verbesserungen, Korrekturen oder sonstige Änderungen an den RESSOURCEN oder den darin beschriebenen Produkten vorzunehmen.
Die RESSOURCEN sind für erfahrene Benutzer mit entsprechenden Designkenntnissen bestimmt. Benutzer sind allein verantwortlich für ihre Auswahl und Verwendung der RESSOURCEN und für jegliche Anwendung der darin beschriebenen Produkte. Der Benutzer verpflichtet sich, RPL von allen Verbindlichkeiten, Kosten, Schäden oder sonstigen Verlusten freizustellen, die sich aus der Verwendung der RESSOURCEN ergeben. - RPL erteilt Benutzern die Erlaubnis, die RESSOURCEN ausschließlich in Verbindung mit den Raspberry Pi-Produkten zu verwenden. Jede andere Verwendung der RESSOURCEN ist untersagt. Es wird keine Lizenz für andere RPL- oder andere geistige Eigentumsrechte Dritter erteilt.
- AKTIVITÄTEN MIT HOHEM RISIKO. Raspberry Pi-Produkte sind nicht für den Einsatz in Gefahrenumgebungen konzipiert, hergestellt oder vorgesehen, die eine ausfallsichere Leistung erfordern, wie etwa beim Betrieb von Nuklearanlagen, Flugzeugnavigations- oder Kommunikationssystemen, der Flugverkehrskontrolle, Waffensystemen oder sicherheitskritischen Anwendungen (einschließlich lebenserhaltender Systeme und anderer medizinischer Geräte), in denen der Ausfall der Produkte direkt zu Tod, Personenschäden oder schweren körperlichen oder Umweltschäden führen könnte („Aktivitäten mit hohem Risiko“). RPL lehnt ausdrücklich jede ausdrückliche oder stillschweigende Gewährleistung der Eignung für Aktivitäten mit hohem Risiko ab und übernimmt keine Haftung für die Verwendung oder Einbeziehung von Raspberry Pi-Produkten in Aktivitäten mit hohem Risiko.
- Raspberry Pi-Produkte werden gemäß den Allgemeinen Geschäftsbedingungen von RPL bereitgestellt. Die Bereitstellung der RESSOURCEN durch RPL erweitert oder ändert die Allgemeinen Geschäftsbedingungen von RPL nicht, einschließlich, aber nicht beschränkt auf die darin enthaltenen Haftungsausschlüsse und Garantien.
Kapitel 1. Einführung
Abbildung 1. KiCad 3D-Rendering des RP2350A Minimal Design Beispielample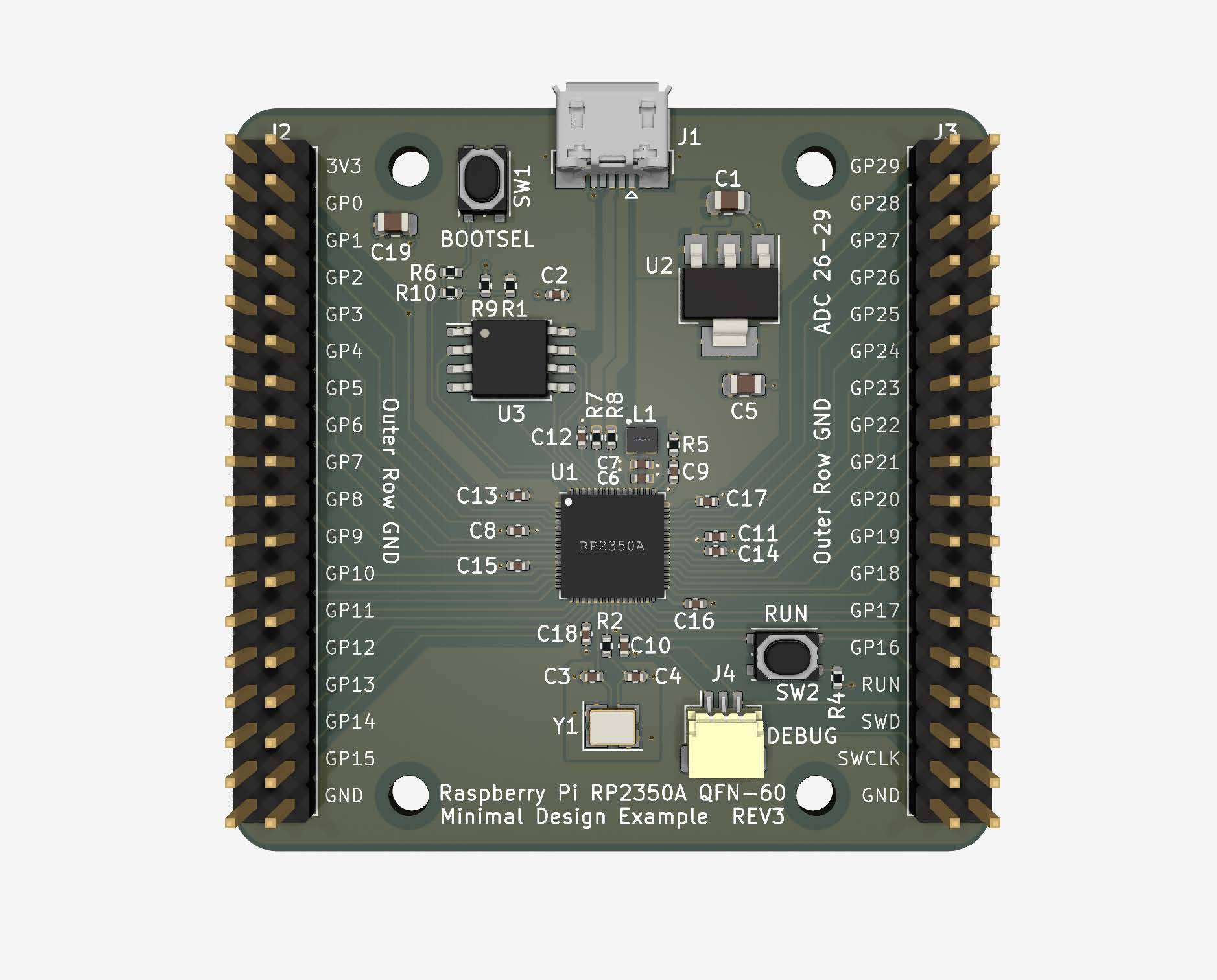
Als wir den Raspberry Pi RP2040 erstmals vorstellten, veröffentlichten wir auch ein „Minimal“-Design,ampDatei und zugehöriger Leitfaden „Hardware-Design mit RP2040“, der hoffentlich erklärt, wie der RP2040 in einer einfachen Platine verwendet werden kann und warum die verschiedenen Komponenten ausgewählt wurden. Mit der Einführung der RP235x-Serie ist es an der Zeit, das ursprüngliche RP2040-Minimal-Design zu überdenken und es zu aktualisieren, um die neuen Funktionen und auch die einzelnen Gehäusevarianten zu berücksichtigen; den RP2350A mit seinem QFN-60-Gehäuse und den RP2350B, der ein QFN-80 ist. Auch diese Designs liegen im Kicad-Format (7.0) vor und stehen zum Download zur Verfügung (https://datasheets.raspberrypi.com/rp2350/Minimal-KiCAD.zip).
Das Minimal Board
Die ursprüngliche Minimal-Platine war ein Versuch, ein einfaches Referenzdesign bereitzustellen, das das absolute Minimum an externen Komponenten verwendet, die zum Betrieb des RP2040 erforderlich sind, und dennoch alle IOs frei zugänglich und zugänglich macht. Dies bestand im Wesentlichen aus einer Stromquelle (einem linearen 5-V- bis 3.3-V-Regler), einem Quarzoszillator, einem Flash-Speicher und IO-Anschlüssen (einer Micro-USB-Buchse und GPIO-Headern). Die neuen Minimal-Platinen der RP235x-Serie sind weitgehend gleich, jedoch mit einigen Änderungen, die aufgrund der neuen Hardware notwendig sind. Darüber hinaus habe ich, obwohl dies etwas gegen die minimalistische Natur des Designs verstößt, ein paar Schaltflächen für Bootsel und Run sowie einen separaten SWD-Header hinzugefügt, was dieses Mal ein deutlich weniger frustrierendes Debugging-Erlebnis bedeuten sollte. Designs benötigen diese Schaltflächen strenggenommen nicht, die Signale sind weiterhin auf den Headern verfügbar und sie können weggelassen werden, wenn Sie besonders kosten- oder platzbewusst sind oder masochistische Tendenzen haben.
RP2040 vs. RP235x-Serie
Die offensichtlichste Änderung betrifft die Gehäuse. Während der RP2040 ein 7x7 mm QFN-56 ist, hat die RP235x-Serie derzeit vier verschiedene Mitglieder. Es gibt zwei Geräte, die das gleiche QFN-60-Gehäuse haben: der RP2350A, der keinen internen Flash-Speicher enthält, und der RP2354A, der dies tut. Ebenso gibt es den QFN-80 in zwei Varianten: den RP2354B mit Flash und den RP2350B ohne. Die QFN-60-Geräte und der ursprüngliche RP2040 haben ein gemeinsames Erbetage.
Sie haben jeweils 30 GPIOs, von denen vier auch mit dem ADC verbunden sind, und sind 7 x 7 mm groß. Trotzdem ist der RP2350A kein Ersatz für den RP2040, da die Anzahl der Pins bei jedem unterschiedlich ist. Im Gegensatz dazu haben die QFN-80-Chips jetzt 48 GPIOs, und acht davon sind jetzt ADC-fähig. Aus diesem Grund haben wir jetzt zwei Minimal-Boards: eines für die 60-Pin-Geräte und eines für die 80-Pin-Geräte. Diese Minimal-Boards sind hauptsächlich für Teile ohne internen Flash (RP2350) konzipiert, die Designs können jedoch problemlos mit den internen Flash-Geräten (RP2354) verwendet werden, indem einfach der integrierte Flash-Speicher weggelassen wird, oder sie können sogar als sekundäres Flash-Gerät verwendet werden (mehr dazu später). Es gibt kaum einen Unterschied zwischen den beiden Boards, außer der Tatsache, dass die QFN-80-Version längere Header-Reihen hat, um die zusätzlichen GPIOs aufzunehmen, und das Board daher größer ist.
Abgesehen vom Gehäuse sind die Netzteile der größte Unterschied auf Platinenebene zwischen der RP235x-Serie und der RP2040. Die RP235x-Serie hat einige neue Stromanschlüsse und einen anderen internen Regler. Der 100-mA-Linearregler der RP2040 wurde durch einen 200-mA-Schaltregler ersetzt und erfordert daher eine sehr spezielle Schaltung und viel Sorgfalt beim Layout. Es wird dringend empfohlen, dass Sie sich genau an unser Layout und unsere Komponentenauswahl halten. Wir haben bereits mehrere Iterationen des Designs durchführen müssen, also müssen Sie das hoffentlich nicht tun.
Abbildung 2. KiCad 3D-Rendering des RP2350B Minimal Design Beispielample 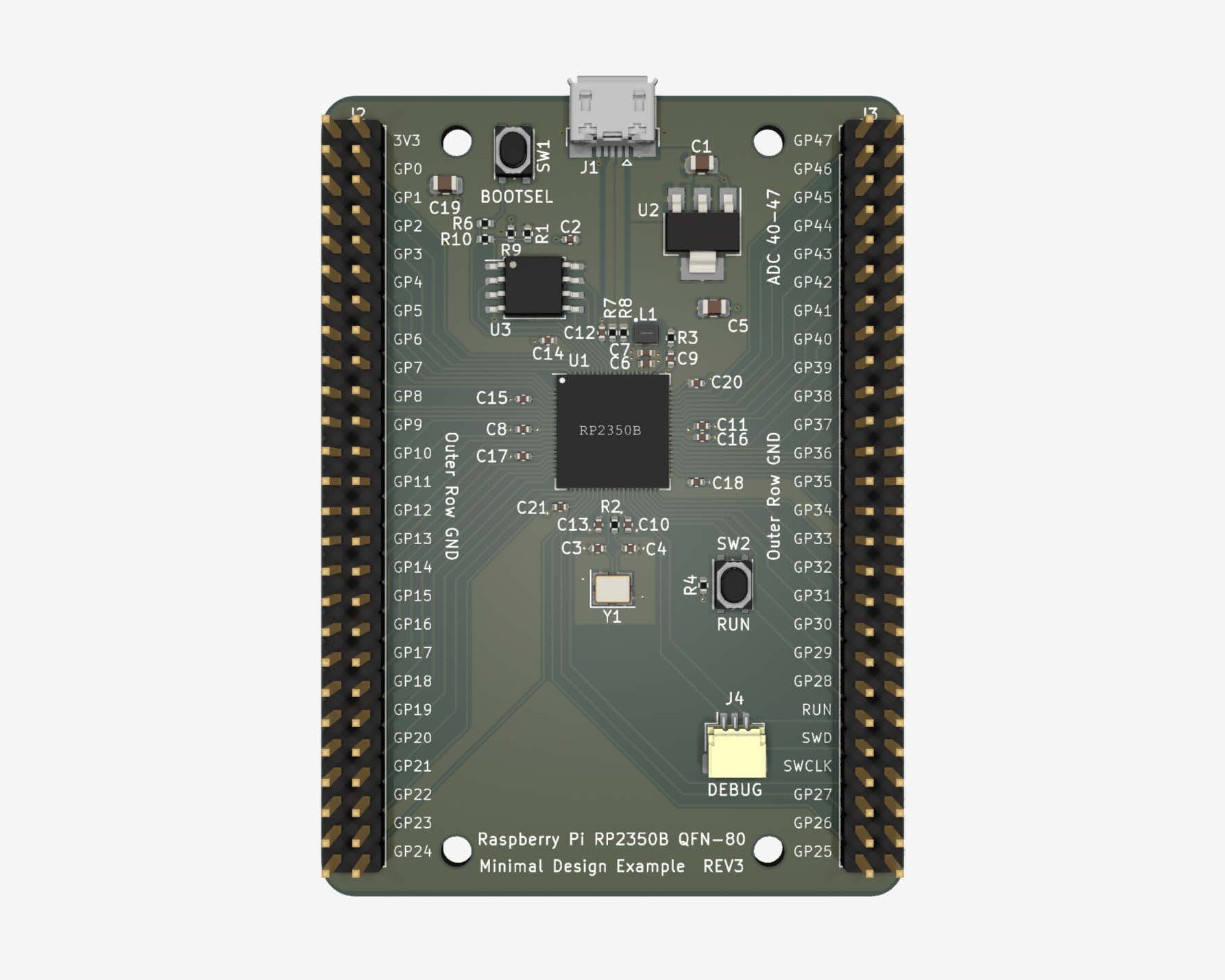
Das Design
Die Absicht des Minimal Design ExampDas Ziel besteht darin, ein Paar einfacher Platinen mit der RP235x-Serie zu erstellen, die billig und einfach herzustellen sein sollten, ohne unnötig exotische PCB-Technologien zu verwenden. Die Minimal-Platinen sind daher 2-Schicht-Designs, die Komponenten verwenden, die allgemein verfügbar sein sollten, und alle auf der Oberseite der Platine montiert sind. Obwohl es schön wäre, große, leicht von Hand lötbare Komponenten zu verwenden, bedeutet der kleine Abstand der QFN-Chips (0.4 mm), dass die Verwendung einiger passiver 0402-Komponenten (1005 metrisch) unvermeidlich ist, wenn alle GPIOs verwendet werden sollen. Während das Handlöten von 0402-Komponenten mit einem anständigen Lötkolben nicht allzu schwierig ist, ist es nahezu unmöglich, die QFNs ohne Spezialausrüstung zu löten.
In den nächsten Abschnitten werde ich versuchen zu erklären, wozu die zusätzlichen Schaltkreise dienen und wie wir hoffentlich zu unseren Entscheidungen gekommen sind. Da ich eigentlich über zwei separate Designs sprechen werde, eines für jede Gehäusegröße, habe ich versucht, die Dinge so einfach wie möglich zu halten. Soweit möglich sind alle Komponentenreferenzen für die beiden Platinen identisch, d. h. wenn ich mich auf U1, R1 usw. beziehe, ist dies für beide Platinen gleichermaßen relevant. Die offensichtliche Ausnahme ist, wenn sich die Komponente nur auf einer der Platinen befindet (in allen Fällen wird dies auf der größeren 80-Pin-Variante sein), dann wird die betreffende Komponente nur auf dem QFN-80-Design sein; z. B.ample, R13 erscheint nur auf diesem Board.
Kapitel 2. Macht
Die Netzteile der RP235x-Serie und des RP2040 unterscheiden sich diesmal etwas, obwohl in der einfachsten Konfiguration immer noch zwei Netzteile benötigt werden, 3.3 V und 1.1 V. Die RP235x-Serie ist gleichzeitig stromhungriger, da sie eine höhere Leistung bietet, und auch sparsamer (im niedrigen Leistungszustand) als ihr Vorgänger, und so wurde der Linearregler des RP2040 mit einem Schaltregler aufgerüstet. Dies ermöglicht uns eine höhere Energieeffizienz bei höheren Strömen (bis zu 200 mA im Vergleich zu den 100 mA zuvor).
Neue On-Chip-Voltage regler
Abbildung 3. Schematischer Abschnitt, der den internen Reglerkreis zeigt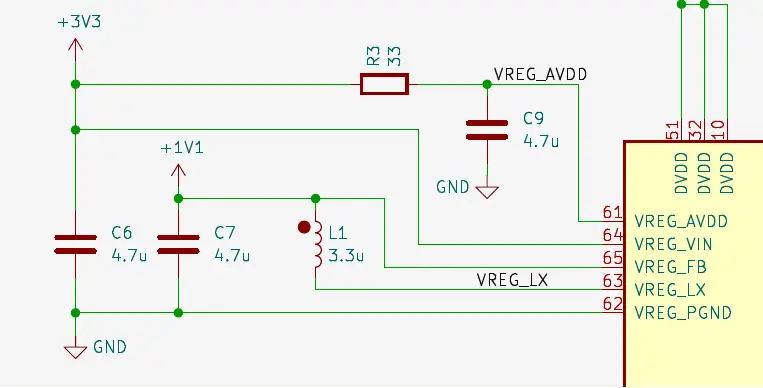
Der lineare Regler des RP2040 hatte zwei Pins, einen 3.3-V-Eingang und einen 1.1-V-Ausgang, um die DVDD auf dem Chip zu versorgen. Dieses Mal hat der Regler der RP235x-Serie fünf Pins und erfordert einige externe Komponenten, damit er funktioniert. Obwohl dies in Bezug auf die Benutzerfreundlichkeit ein kleiner Rückschritt zu sein scheint, hat der Schaltregler den Vorteiltage) eine höhere Energieeffizienz bei höheren Lastströmen.
Wie der Name schon sagt, schaltet der Regler schnell einen internen Transistor ein und aus, der die 3.3-V-Eingangsspannung verbindet.tage (VREG_VIN) an den VREG_LX-Pin an und kann mit Hilfe einer Induktivität (L1) und eines Ausgangskondensators (C7) eine DC-Ausgangsspannung erzeugentage, die vom Eingang heruntertransformiert wurde. Der VREG_FB-Pin überwacht die Ausgangsspannungtage, und passt das Ein-/Aus-Verhältnis des Schaltzyklus an, um sicherzustellen, dass die erforderliche Lautstärketage wird beibehalten. Da große Ströme von VREG_VIN zu VREG_LX geschaltet werden, ist ein großer Kondensator (C6) in der Nähe des Eingangs erforderlich, damit wir die 3.3-V-Versorgung nicht zu sehr stören. Apropos dieser großen Schaltströme: Der Regler verfügt auch über einen eigenen Masseanschluss, VREG_PGND. Ähnlich wie bei VREG_VIN und VREG_LX ist das Layout dieser Verbindung kritisch, und während VREG_PGND mit dem Haupt-GND verbunden werden muss, muss dies so erfolgen, dass alle großen Schaltströme direkt zum PGND-Pin zurückkehren, ohne den Rest des GND zu sehr zu stören.
Der letzte Pin ist VREG_AVDD, der die analogen Schaltkreise im Regler versorgt und sehr empfindlich gegenüber Rauschen ist.
Abbildung 4. Schematischer Abschnitt, der das PCB-Layout des Reglers zeigt 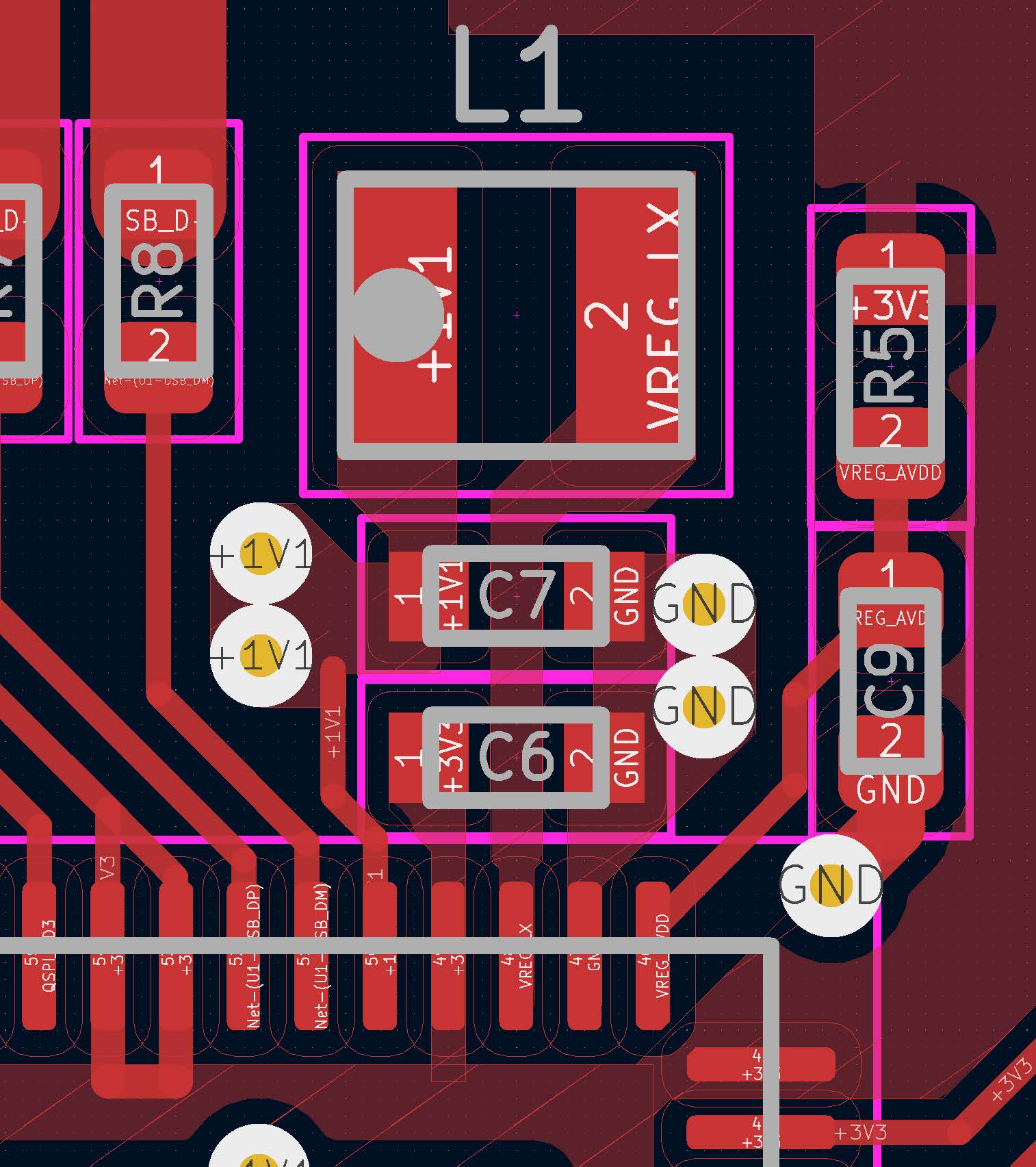
- Das Layout des Reglers auf den Minimalplatinen ähnelt stark dem des Raspberry Pi Pico 2. In das Design dieser Schaltung ist viel Arbeit geflossen, und es waren viele Iterationen der Leiterplatte erforderlich, um sie so gut wie möglich zu machen. Sie könnten diese Komponenten zwar auf verschiedene Weise platzieren und trotzdem den Regler zum „Funktionieren“ bringen (d. h. eine Ausgangsspannung erzeugen).tage auf ungefähr dem richtigen Niveau, gut genug, um es zum Laufen zu bringen Code), haben wir festgestellt, dass unser Regler genau richtig behandelt werden muss, um ihn zufrieden zu halten, und mit zufrieden meine ich, die richtige Ausgangslautstärke zu erzeugentage unter verschiedenen Laststrombedingungen.
- Während wir unsere Experimente dazu durchführten, waren wir etwas enttäuscht, als wir daran erinnert wurden, dass die unbequeme Welt der Physik nicht immer ignoriert werden kann. Wir als Ingenieure versuchen größtenteils genau dies zu tun: Wir vereinfachen Komponenten, ignorieren (oft) unbedeutende physikalische Eigenschaften und konzentrieren uns stattdessen auf die Eigenschaft, die uns interessiert. Zum BeispielampDas heißt, ein einfacher Widerstand hat nicht nur einen Widerstandswert, sondern auch eine Induktivität usw. In unserem Fall haben wir (wieder)entdeckt, dass Induktoren ein mit ihnen verbundenes Magnetfeld haben, das, was wichtig ist, in eine Richtung strahlt, die davon abhängt, wie die Spule gewickelt ist und in welche Richtung der Strom fließt. Wir wurden auch daran erinnert, dass ein „vollständig“ abgeschirmter Induktor nicht das bedeutet, was Sie denken. Das Magnetfeld wird weitgehend gedämpft, aber ein Teil entweicht immer noch. Wir haben festgestellt, dass die Reglerleistung massiv verbessert werden könnte, wenn der Induktor „richtig herum“ ist.
- Es stellt sich heraus, dass das von einer „falsch herum“ angebrachten Induktivität ausgehende Magnetfeld den Ausgangskondensator (C7) des Reglers stört, was wiederum die Steuerschaltung im RP2350 stört. Mit der richtig ausgerichteten Induktivität und dem hier verwendeten präzisen Layout und den Komponentenauswahlen ist dieses Problem behoben. Es gibt zweifellos andere Layouts, Komponenten usw., die mit einer Induktivität in beliebiger Ausrichtung funktionieren könnten, aber dafür wahrscheinlich viel mehr Platz auf der Leiterplatte benötigen. Wir haben dieses empfohlene Layout bereitgestellt, um den Leuten die vielen Ingenieurstunden zu ersparen, die wir mit der Entwicklung und Verfeinerung dieser kompakten und gut funktionierenden Lösung verbracht haben.
- Genauer gesagt, wir gehen so weit zu sagen, dass, wenn Sie sich entscheiden, unsere Ex nicht zu verwendenample, dann tun Sie dies auf eigenes Risiko. Ähnlich wie wir es bereits mit RP2040 und dem Kristallschaltkreis tun, wo wir darauf bestehen (naja, dringend empfehlen), dass Sie ein bestimmtes Teil verwenden (wir werden dies im Kristallabschnitt dieses Dokuments erneut tun).
- Die Richtung dieser kleinen Induktoren wird so gut wie nie ignoriert, da die Ausrichtung der Spulenwicklung nicht abgeleitet werden kann und sie außerdem zufällig auf einer Rolle mit Bauteilen verteilt ist. Größere Induktorgehäuse sind häufig mit Polaritätsmarkierungen versehen, wir konnten jedoch keine passenden in der von uns gewählten Gehäusegröße 0806 (2016 metrisch) finden. Zu diesem Zweck haben wir mit Abracon zusammengearbeitet, um ein 3.3-μH-Teil mit einem Punkt zur Anzeige der Polarität herzustellen, und, was wichtig ist, auf einer Rolle mit allen gleich ausgerichteten Teilen. Die TBD sind (oder werden in Kürze) von Händlern der Öffentlichkeit zur Verfügung gestellt. Wie bereits erwähnt, ist die VREG_AVDD-Versorgung sehr rauschempfindlich und muss daher gefiltert werden. Wir haben festgestellt, dass ein RC-Filter von 200 Ω und 33 μF ausreicht, da der VREG_AVDD nur etwa 4.7 μA zieht.
- Um es noch einmal zusammenzufassen: Die verwendeten Komponenten sind …
- C6, C7 und C9 – 4.7 μF (0402, 1005 metrisch)
- L1 – Abracon TBD (0806, 2016 metrisch)
- R3 – 33 Ω (0402, 1005 metrisch)
- Das Datenblatt des RP2350 enthält eine ausführlichere Beschreibung der Empfehlungen zum Reglerlayout. Weitere Informationen finden Sie unter „Externe Komponenten und PCB-Layoutanforderungen“.
Eingangsversorgung
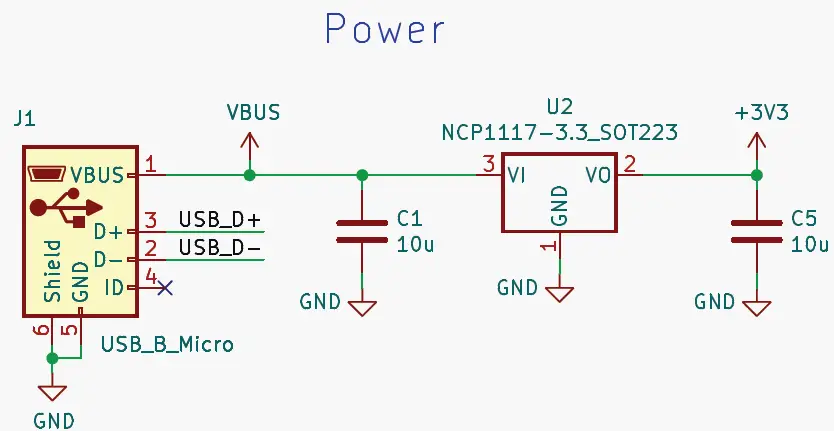
Die Eingangsstromversorgung für dieses Design erfolgt über den 5-V-VBUS-Pin eines Micro-USB-Anschlusses (in Abbildung 1 mit J5 gekennzeichnet). Dies ist eine gängige Methode zur Stromversorgung elektronischer Geräte und ist hier sinnvoll, da RP2350 über eine USB-Funktionalität verfügt, die wir an die Datenpins dieses Anschlusses anschließen werden. Da wir für dieses Design nur 3.3 V benötigen (die 1.1-V-Versorgung kommt aus dem internen), müssen wir die eingehende 5-V-USB-Versorgung senken, in diesem Fall mithilfe eines weiteren, externentage Regler, in diesem Fall ein Linearregler (auch bekannt als Low Drop Out-Regler oder LDO). Nachdem ich zuvor die Vorzüge eines effizienten Schaltreglers gepriesen habe, könnte es auch hier eine kluge Entscheidung sein, einen zu verwenden, aber ich habe mich für die Einfachheit entschieden. Erstens ist die Verwendung eines LDO fast immer einfacher. Es sind keine Berechnungen erforderlich, um herauszufinden, welche Induktorgröße Sie verwenden sollten oder wie groß die Ausgangskondensatoren sind, und das Layout ist normalerweise auch viel einfacher. Zweitens ist es hier nicht das Ziel, jeden letzten Tropfen Leistung zu sparen; wenn es das wäre, würde ich ernsthaft in Erwägung ziehen, einen Schaltregler zu verwenden, und Sie können einen Ex findenample, dies auf dem Raspberry Pi Pico 2 zu tun. Und drittens kann ich einfach die Schaltung „ausleihen“, die ich zuvor auf der RP2040-Version der Minimal-Platine verwendet habe. Der hier ausgewählte NCP1117 (U2) hat einen festen Ausgang von 3.3 V, ist weithin verfügbar und kann bis zu 1 A Strom liefern, was für die meisten Designs ausreichend sein wird. Ein Blick auf das Datenblatt des NCP1117 verrät uns, dass dieses Gerät einen 10μF-Kondensator am Eingang und einen weiteren am Ausgang (C1 und C5) benötigt.
Entkopplungskondensatoren
Abbildung 6. Schematischer Abschnitt mit den Eingängen der RP2350-Stromversorgung, Voltage Regler und Entkopplungskondensatoren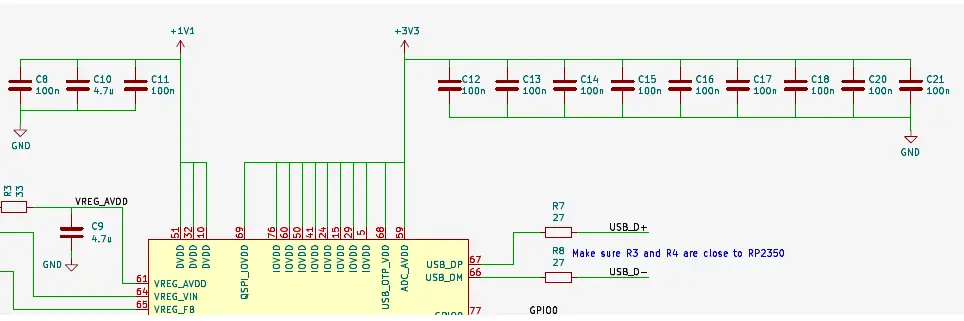
Ein weiterer Aspekt des Netzteildesigns sind die für RP2350 erforderlichen Entkopplungskondensatoren. Diese erfüllen zwei grundlegende Funktionen. Erstens filtern sie das Rauschen des Netzteils heraus und zweitens stellen sie eine lokale Ladungsversorgung bereit, die die Schaltkreise im RP2350 kurzfristig nutzen können. Dies verhindert, dass die SpannungtagDer Pegel in der unmittelbaren Umgebung fällt nicht zu stark ab, wenn der Strombedarf plötzlich steigt. Aus diesem Grund ist es wichtig, die Entkopplung in der Nähe der Stromanschlüsse zu platzieren. Normalerweise empfehlen wir die Verwendung eines 100-nF-Kondensators pro Stromanschluss, in einigen Fällen weichen wir jedoch von dieser Regel ab.
Abbildung 7. Layoutabschnitt mit Routing und Entkopplung des RP2350 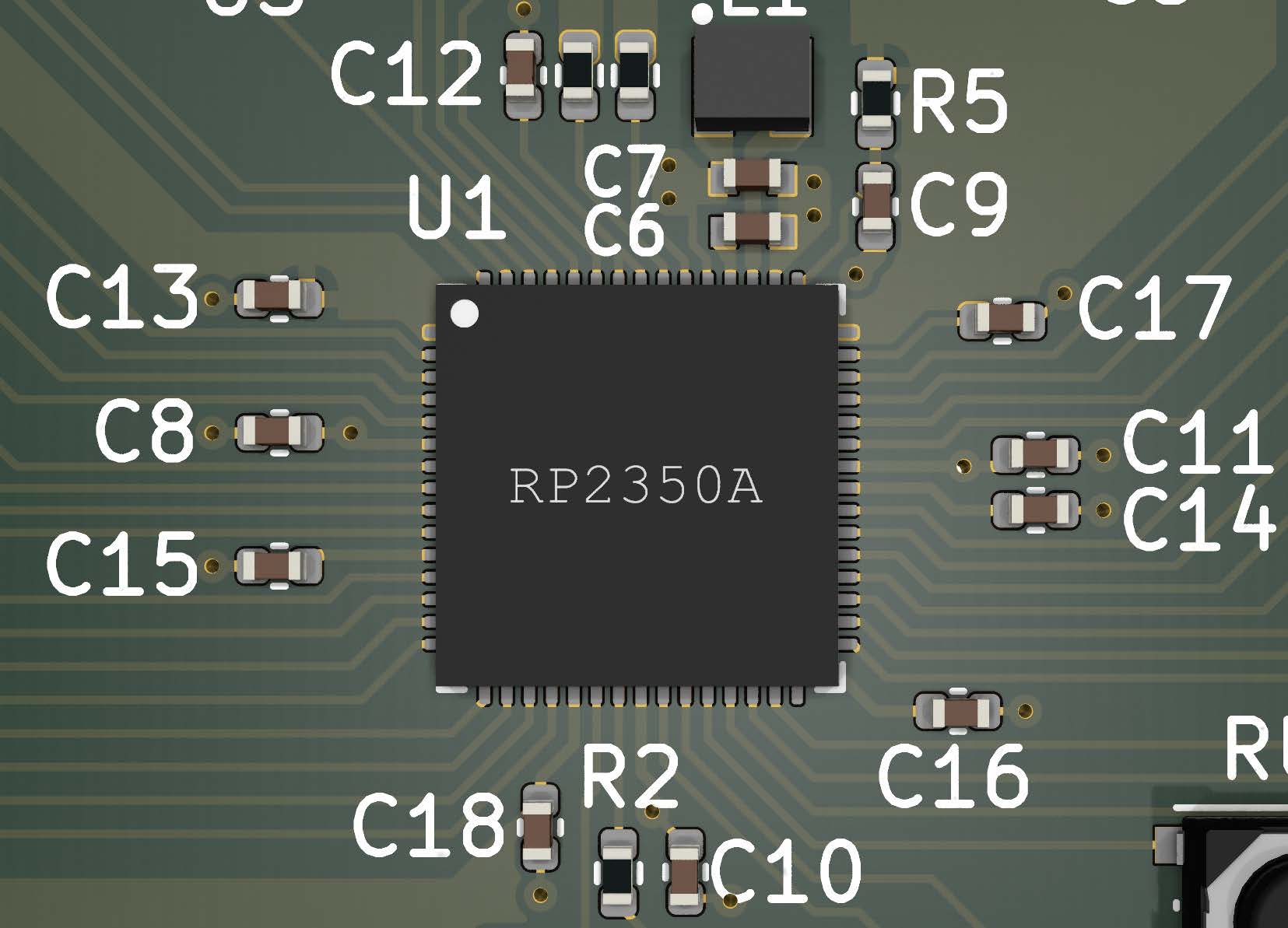
- Erstens müssen wir bei der Anzahl der verwendbaren Entkopplungskondensatoren Kompromisse eingehen, um genügend Platz für die Weiterleitung aller Chip-Pins vom Gerät weg zu haben. Bei diesem Design teilen sich die Pins 53 und 54 von RP2350A (Pins 68 und 69 von RP2350B) einen einzigen Kondensator (C12 in Abbildung 7 und Abbildung 6), da auf dieser Seite des Geräts nicht viel Platz ist und die Komponenten und das Layout des Reglers Vorrang haben.
- Dieser Platzmangel könnte teilweise überwunden werden, wenn wir komplexere/teurere Technologien verwenden würden, wie z. B. kleinere Komponenten oder eine vierschichtige Leiterplatte mit Komponenten auf der Ober- und Unterseite. Dies ist ein Design-Kompromiss; wir haben die Komplexität und die Kosten verringert, auf Kosten einer geringeren Entkopplungskapazität und Kondensatoren, die etwas weiter vom Chip entfernt sind als optimal (dies erhöht die Induktivität). Dies könnte zur Folge haben, dass die maximale Geschwindigkeit, mit der das Design arbeiten kann, begrenzt wird, da die LautstärketagDie Stromversorgung könnte zu laut werden und unter die minimal zulässige Lautstärke fallen.tage; aber für die meisten Anwendungen sollte dieser Kompromiss akzeptabel sein.
- Die andere Abweichung von der 100nF-Regel ist, dass wir damit die Vol weiter verbessern können.tage Reglerleistung; wir empfehlen die Verwendung eines 4.7 μF für C10, der auf der dem Regler gegenüberliegenden Seite des Chips platziert ist.
Kapitel 3. Flash-Speicher
Primärer Blitz
Abbildung 8. Schematischer Abschnitt, der den primären Flash-Speicher und die USB_BOOT-Schaltung zeigt
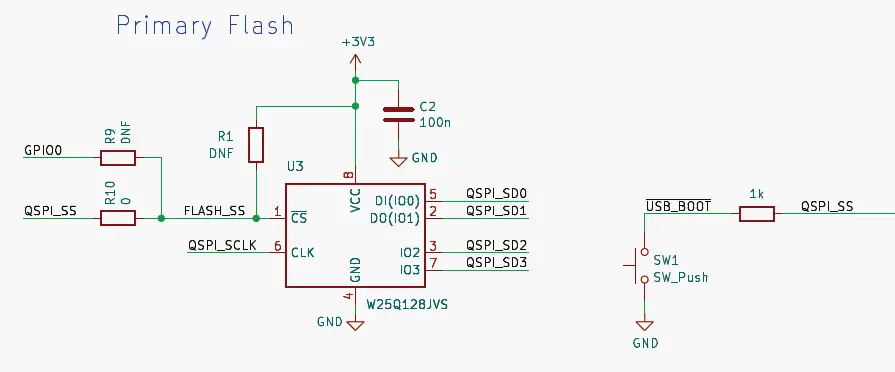
- Um Programmcode speichern zu können, von dem RP2350 booten und ausgeführt werden kann, müssen wir einen Flash-Speicher verwenden, genauer gesagt einen Quad-SPI-Flash-Speicher. Das hier ausgewählte Gerät ist ein W25Q128JVS-Gerät (U3 in Abbildung 8), ein 128-Mbit-Chip (16 MB). Dies ist die größte Speichergröße, die RP2350 unterstützen kann. Wenn Ihre spezielle Anwendung nicht so viel Speicher benötigt, kann stattdessen ein kleinerer, billigerer Speicher verwendet werden.
- Da dieser Datenbus recht hochfrequent sein kann und regelmäßig verwendet wird, sollten die QSPI-Pins des RP2350 direkt mit dem Flash verbunden werden, wobei kurze Verbindungen verwendet werden sollten, um die Signalintegrität aufrechtzuerhalten und Übersprechen in umliegenden Schaltkreisen zu reduzieren. Übersprechen bedeutet, dass Signale in einem Schaltkreisnetz unerwünschtes Übersprechen verursachen können.tages auf einem benachbarten Stromkreis, was möglicherweise zu Fehlern führen kann.
- Das QSPI_SS-Signal ist ein Sonderfall. Es ist direkt mit dem Flash verbunden, hat aber auch zwei Widerstände (eigentlich vier, aber dazu komme ich später). Der erste (R1) ist ein Pull-up zur 3.3-V-Versorgung. Der Flash-Speicher erfordert, dass der Chip-Select-Eingang auf der gleichen Spannung liegttage als eigenen 3.3-V-Versorgungspin, wenn das Gerät eingeschaltet wird, da es sonst nicht richtig funktioniert. Wenn der RP2350 eingeschaltet wird, wird sein QSPI_SS-Pin automatisch auf Pull-up gesetzt, aber es gibt eine kurze Zeitspanne beim Einschalten, in der der Zustand des QSPI_SS-Pins nicht garantiert werden kann. Das Hinzufügen eines Pull-up-Widerstands stellt sicher, dass diese Anforderung immer erfüllt wird. R1 ist im Schaltplan als DNF (Do Not Fit, nicht passend) gekennzeichnet, da wir festgestellt haben, dass bei diesem speziellen Flash-Gerät der externe Pull-up unnötig ist. Wenn jedoch ein anderer Flash verwendet wird, kann es wichtig werden, hier einen 10-kΩ-Widerstand einfügen zu können, daher wurde er für alle Fälle mit aufgenommen.
- Der zweite Widerstand (R6) ist ein 1kΩ-Widerstand, der mit einem Druckknopf (SW1) mit der Bezeichnung „USB_BOOT“ verbunden ist. Dies liegt daran, dass der QSPI_SS-Pin als „Bootstrap“ verwendet wird; RP2350 überprüft den Wert dieses I/O während der Boot-Sequenz, und wenn er eine logische 0 ist, kehrt RP2350 in den BOOTSEL-Modus zurück, in dem sich RP2350 als USB-Massenspeichergerät präsentiert und Code direkt darauf kopiert werden kann. Wenn wir einfach den Knopf drücken, ziehen wir den QSPI_SS-Pin auf Masse, und wenn das Gerät anschließend zurückgesetzt wird (z. B. durch Umschalten des RUN-Pins), wird RP2350 im BOOTSEL-Modus neu gestartet, anstatt zu versuchen, den Inhalt des Flash auszuführen. Diese Widerstände, R2 und R6 (auch R9 und R10), sollten in der Nähe des Flash-Chips platziert werden, damit wir zusätzliche Längen von Kupferbahnen vermeiden, die das Signal beeinträchtigen könnten.
- All das oben Gesagte gilt speziell für den RP2350, der keinen internen Flash hat. Natürlich haben die RP2354-Geräte interne 2-MB-Flash-Speicher, sodass der externe U3-Speicher nicht erforderlich ist. U3 kann also problemlos aus dem Schaltplan entfernt oder einfach unbestückt gelassen werden. In beiden Fällen sollten wir den USB_BOOT-Schalter weiterhin mit QSPI_SS verbunden lassen, damit wir weiterhin in den USB-Boot-Modus wechseln können.
Sekundärer Flash oder PSRAM
- Die RP235x-Serie unterstützt jetzt ein zweites Speichergerät mit denselben QSPI-Pins, wobei ein GPIO die zusätzliche Chipauswahl bereitstellt. Wenn wir also einen RP2354 verwenden (der über einen internen Flash verfügt), könnten wir U3 als sekundären Flash verwenden oder ihn sogar durch ein PSRAM-Gerät ersetzen. Dazu müssen wir QSPI_SS von U3 trennen und stattdessen an einen geeigneten GPIO anschließen. Der nächste GPIO, der als Chipauswahl (XIP_CS1n) verwendet werden kann, ist GPIO0. Indem wir also die 0Ω von R10 entfernen und an R9 anbringen, können wir jetzt zusätzlich zum On-Chip-Flash auf U3 zugreifen. Um die Vorteile voll auszuschöpfen,tagZusätzlich zu dieser Funktion, bei der wir über zwei externe Speichergeräte verfügen, sodass die flashlosen RP2350-Teile davon profitieren können, verfügt die größere der beiden Minimal-Platinen für den RP2350B über einen optionalen Footprint (U4) für einen zusätzlichen Speicherchip.
Abbildung 9. Schematischer Abschnitt, der das optionale sekundäre Speichergerät zeigt
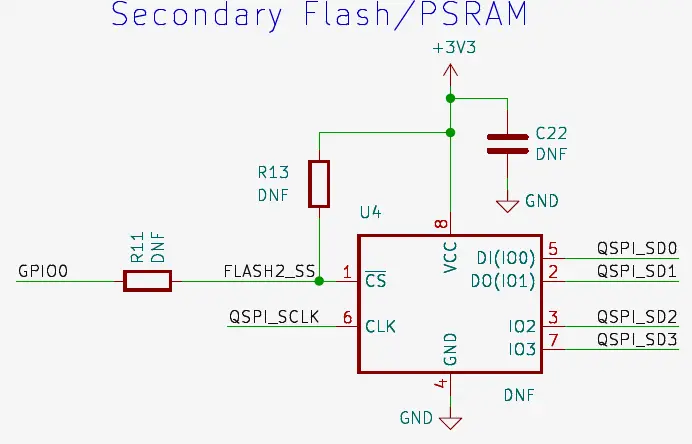
Um dieses Gerät verwenden zu können, muss es offensichtlich bestückt werden, ebenso wie R11 (0Ω) und R13 (10KΩ). Das Hinzufügen von R11 verbindet GPIO0 (das XIP_CS1n-Signal) mit der Chipauswahl des zweiten Speichers. Der Pull-up am Chipauswahl-Pin ist dieses Mal unbedingt erforderlich, da der Standardzustand von GPIO0 darin besteht, beim Einschalten auf Low zu ziehen, was zu einem Ausfall unseres Flash-Geräts führen würde. C22 wäre auch erforderlich, um eine lokale Entkopplung der Stromversorgung für U4 bereitzustellen.
Unterstützte Flash-Chips
Die erste Flash-Probe-Sequenz, die von unten verwendet wird, um die zweite s zu extrahierentage aus Flash, verwendet einen seriellen Lesebefehl 03h mit 24-Bit-Adressierung und einem seriellen Takt von ungefähr 1 MHz. Es durchläuft wiederholt die vier Kombinationen von Taktpolarität und Taktphase und sucht nach einer gültigen Sekunde stage CRC32-Prüfsumme.
Als zweites stagAnschließend kann die Ausführung vor Ort mit demselben 03h-Seriell-Lesebefehl konfiguriert werden. RP2350 kann die Ausführung vor Ort im Cache-Flash mit jedem Chip durchführen, der 03h-Seriell-Lesen mit 24-Bit-Adressierung unterstützt, was die meisten Flash-Geräte der 25er-Serie einschließt. Das SDK bietet eine Exampdie zweite stage für CPOL=0 CPHA=0, bei https://github.com/raspberrypi/pico-sdk/blob/master/src/rp2350/boot_stage2/boot2_generic_03h.S. Um die Flash-Programmierung mit den Routinen im unteren Bereich zu unterstützen, muss das Gerät auch auf die folgenden Befehle reagieren:
- 02h 256-Byte-Seitenprogramm
- 05h Statusregister lesen
- 06h Schreibfreigabe-Latch setzen
- 20h 4kB Sektor löschen
RP2350 unterstützt außerdem eine Vielzahl von Dual-SPI- und QSPI-Zugriffsmodi. Zum Beispielampich, https://github.com/raspberrypi/pico-sdk/blob/master/src/rp2350/boot_stage2/boot2_w25q080.S konfiguriert ein Gerät der Winbond W25Q-Serie für den kontinuierlichen Quad-IO-Lesemodus, wobei RP2350 Quad-IO-Adressen (ohne Befehlspräfix) sendet und der Flash mit Quad-IO-Daten antwortet.
Bei Flash-XIP-Modi ist Vorsicht geboten, da das Flash-Gerät nicht mehr auf Standard-Serienbefehle reagiert, wie z. B. beim oben erwähnten kontinuierlichen Winbond-Lesemodus. Dies kann zu Problemen führen, wenn RP2350 zurückgesetzt wird, das Flash-Gerät jedoch nicht aus- und wieder eingeschaltet wird, da das Flash-Gerät dann nicht auf die Flash-Testsequenz des Bootroms reagiert. Vor der Ausgabe des seriellen 03h-Lesevorgangs gibt das Bootrom immer die folgende feste Sequenz aus, die die bestmögliche Sequenz zum Absetzen von XIP auf einer Reihe von Flash-Geräten darstellt:
- CSn=1, IO[3:0]=4'b0000 (über Pulldowns, um Konflikte zu vermeiden), Ausgabe von ×32 Takten
- CSn=0, IO[3:0]=4'b1111 (über Pull-Ups, um Konflikte zu vermeiden), Ausgabe von ×32 Takten
- CSn = 1
- CSn=0, MOSI=1'b1 (angetrieben Low-Z, alle anderen I/Os Hi-Z), Ausgabe von ×16 Takten
Wenn Ihr ausgewähltes Gerät im kontinuierlichen Lesemodus nicht auf diese Sequenz reagiert, muss es in einem Zustand gehalten werden, in dem jeder Übertragung ein serieller Befehl vorangestellt ist. Andernfalls kann RP2350 nach einem internen Reset nicht wiederhergestellt werden.
Weitere Einzelheiten zum QSPI finden Sie unter „QSPI Memory Interface (QMI)“ im Datenblatt des RP2350.
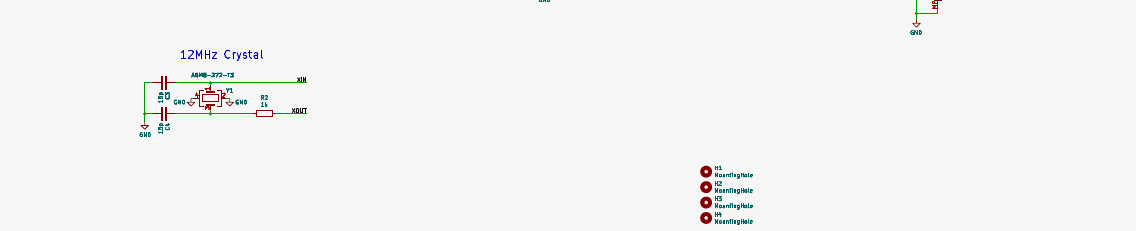
Kapitel 4. Quarzoszillator
Abbildung 10. Schematischer Abschnitt mit Darstellung des Quarzoszillators und der Lastkondensatoren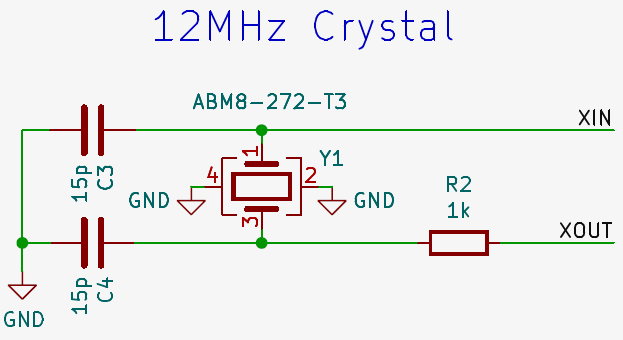
- Streng genommen benötigt der RP2350 keine externe Taktquelle, da er einen eigenen internen Oszillator besitzt. Da die Frequenz dieses internen Oszillators jedoch nicht genau definiert oder kontrolliert ist und von Chip zu Chip sowie bei unterschiedlicher Versorgungsspannung variiert,tags und Temperaturen wird empfohlen, eine stabile externe Frequenzquelle zu verwenden. Anwendungen, die auf genaue Frequenzen angewiesen sind, sind ohne eine externe Frequenzquelle nicht möglich. USB ist ein erstklassiges Beispielample.
- Die Bereitstellung einer externen Frequenzquelle kann auf zwei Arten erfolgen: entweder durch Bereitstellung einer Taktquelle mit einem CMOS-Ausgang (Rechteckwelle des IOVDD-Volttage) in den XIN-Pin oder durch Verwendung eines 12-MHz-Quarzes zwischen
- XIN und XOUT. Hier ist die Verwendung eines Kristalls die bevorzugte Option, da beide relativ günstig und sehr genau sind.
- Der für dieses Design gewählte Kristall ist ein ABM8-272-T3 (Y1 in Abbildung 10). Dies ist derselbe 12-MHz-Kristall, der auf dem Raspberry Pi Pico und dem Raspberry Pi Pico 2 verwendet wird. Wir empfehlen dringend, diesen Kristall zusammen mit der zugehörigen Schaltung zu verwenden, um sicherzustellen, dass die Uhr unter allen Bedingungen schnell startet, ohne den Kristall selbst zu beschädigen. Der Kristall hat eine Frequenztoleranz von 30 ppm, was für die meisten Anwendungen gut genug sein sollte. Neben einer Frequenztoleranz von +/-30 ppm hat er einen maximalen ESR von 50 Ω und eine Lastkapazität von 10 pF, die beide Einfluss auf die Wahl der zugehörigen Komponenten hatten.
- Damit ein Kristall mit der gewünschten Frequenz schwingen kann, gibt der Hersteller die dafür erforderliche Lastkapazität an, die in diesem Fall 10 pF beträgt. Diese Lastkapazität wird erreicht, indem zwei Kondensatoren mit gleichem Wert, einer auf jeder Seite des Kristalls, gegen Erde gelegt werden (C3 und C4). Vom Punkt des Kristalls aus viewsind diese Kondensatoren in Reihe zwischen den beiden Anschlüssen angeschlossen. Die grundlegende Schaltungstheorie sagt uns, dass sie zusammen eine Kapazität von (C3*C4)/(C3+C4) ergeben, und da C3=C4 ist, ist es einfach C3/2. In diesem BeispielampWir haben 15pF-Kondensatoren verwendet, die Reihenschaltung beträgt also 7.5pF. Zusätzlich zu dieser beabsichtigten Lastkapazität müssen wir auch einen Wert für die unbeabsichtigte zusätzliche Kapazität oder parasitäre Kapazität hinzufügen, die wir von den Leiterplattenspuren und den XIN- und XOUT-Pins von RP2350 erhalten. Wir nehmen hierfür einen Wert von 3pF an, und da diese Kapazität parallel zu C3 und C4 liegt, addieren wir diese einfach, um eine Gesamtlastkapazität von 10.5pF zu erhalten, die nahe genug am Zielwert von 10pF liegt. Wie Sie sehen, ist die parasitäre Kapazität der Leiterplattenspuren ein Faktor, und wir müssen sie daher klein halten, damit wir den Kristall nicht stören und ihn daran hindern, wie beabsichtigt zu schwingen. Versuchen Sie, das Layout so kurz wie möglich zu halten.
- Die zweite Überlegung ist der maximale ESR (äquivalenter Serienwiderstand) des Kristalls. Wir haben uns für ein Gerät mit maximal 50 Ω entschieden, da wir festgestellt haben, dass dies zusammen mit einem 1 kΩ Serienwiderstand (R2) ein guter Wert ist, um zu verhindern, dass der Kristall übersteuert und beschädigt wird, wenn ein IOVDD-Pegel von 3.3 V verwendet wird. Wenn IOVDD jedoch weniger als 3.3 V beträgt, wird der Antriebsstrom der XIN/XOUT-Pins reduziert, und Sie werden feststellen, dass die ampDie Schwingungsintensität des Kristalls ist geringer oder er schwingt möglicherweise überhaupt nicht. In diesem Fall muss ein kleinerer Wert des Serienwiderstands verwendet werden. Bei Abweichungen von der hier gezeigten Kristallschaltung oder bei einem IOVDD-Pegel ungleich 3.3 V sind umfangreiche Tests erforderlich, um sicherzustellen, dass der Kristall unter allen Bedingungen schwingt und schnell genug startet, um keine Probleme mit Ihrer Anwendung zu verursachen.
Empfohlener Kristall
- Für Originaldesigns mit RP2350 empfehlen wir die Verwendung des Abracon ABM8-272-T3. Zum Beispielample, neben dem minimalistischen Design example, siehe das Pico 2-Board-Schema in Anhang B des Raspberry Pi Pico 2-Datenblatts und das Pico 2-Design files.
- Für die beste Leistung und Stabilität in typischen Betriebstemperaturbereichen verwenden Sie den Abracon ABM8-272-T3. Sie können den ABM8-272-T3 direkt von Abracon oder einem autorisierten Händler beziehen. Pico 2 wurde speziell auf den ABM8-272-T3 abgestimmt, der die folgenden Spezifikationen aufweist:
- Selbst wenn Sie einen Kristall mit ähnlichen Spezifikationen verwenden, müssen Sie den Schaltkreis in einem Temperaturbereich testen, um die Stabilität sicherzustellen.
- Der Quarzoszillator wird über die IOVDD-Spannung versorgt.tage. Als Ergebnis der Abracon Kristall und diese besondere damping Widerstand sind für 3.3V Betrieb abgestimmt. Wenn Sie eine andere IO Vol verwendentage, müssen Sie erneut abstimmen.
- Bei jeder Änderung der Kristallparameter besteht die Gefahr einer Instabilität aller an den Kristallschaltkreis angeschlossenen Komponenten.
- Wenn Sie den empfohlenen Kristall nicht direkt von Abracon oder einem Wiederverkäufer beziehen können, kontaktieren Sie application@raspberrypi.com.
Kapitel 5. IOs
USB
Abbildung 11. Schematischer Abschnitt mit den USB-Pins des RP2350 und der Serienterminierung
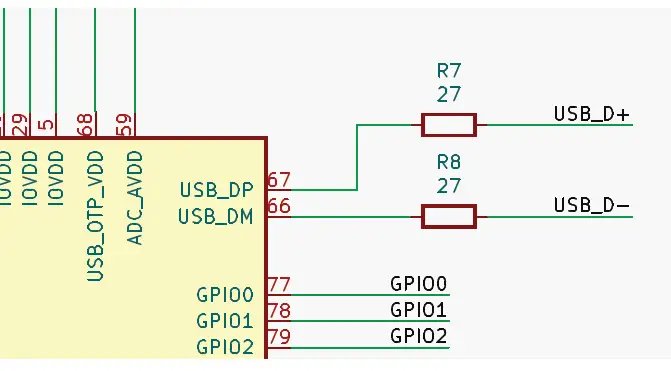
- Der RP2350 bietet zwei Pins, die für Full Speed (FS) oder Low Speed (LS) USB verwendet werden können, entweder als Host oder Gerät, je nach verwendeter Software. Wie bereits besprochen, kann der RP2350 auch als USB-Massenspeichergerät gebootet werden, daher ist es sinnvoll, diese Pins mit dem USB-Anschluss (J1 in Abbildung 5) zu verbinden. Die USB_DP- und USB_DM-Pins am RP2350 erfordern keine zusätzlichen Pull-Ups oder Pull-Downs (erforderlich, um Geschwindigkeit, FS oder LS anzuzeigen oder ob es sich um einen Host oder ein Gerät handelt), da diese in die I/Os integriert sind. Diese I/Os erfordern jedoch 27Ω-Abschlusswiderstände (R7 und R8 in Abbildung 11), die nahe am Chip platziert werden, um die USB-Impedanzspezifikation zu erfüllen.
- Auch wenn RP2350 auf die volle Datenrate (12Mbps) beschränkt ist, sollten wir versuchen, sicherzustellen, dass die charakteristische Impedanz der Übertragungsleitungen (die Kupferbahnen, die den Chip mit dem Anschluss verbinden) nahe an der
- USB-Spezifikation von 90Ω (differenziell gemessen). Wenn wir auf einer 1 mm dicken Platine wie dieser 0.8 mm breite Leiterbahnen auf USB_DP und USB_DM mit einem Abstand von 0.15 mm dazwischen verwenden, sollten wir eine differenzielle charakteristische Impedanz von etwa 90Ω erhalten. Dies soll sicherstellen, dass die Signale so sauber wie möglich über diese Übertragungsleitungen übertragen werden können, wodurch die Lautstärke minimiert wird.tage Reflexionen, die die Integrität des Signals beeinträchtigen können. Damit diese Übertragungsleitungen richtig funktionieren, müssen wir sicherstellen, dass sich direkt unter diesen Leitungen eine Erdung befindet. Ein durchgehender, ununterbrochener Bereich aus Erdungskupfer, der sich über die gesamte Länge der Spur erstreckt. Bei diesem Design ist fast die gesamte untere Kupferschicht der Erdung gewidmet, und es wurde besonders darauf geachtet, dass die USB-Spuren nur über die Erdung verlaufen. Wenn für Ihren Aufbau eine Leiterplatte mit einer Dicke von mehr als 1 mm gewählt wird, haben wir zwei Möglichkeiten. Wir könnten die USB-Übertragungsleitungen neu konstruieren, um den größeren Abstand zwischen der Spur und der darunter liegenden Erdung auszugleichen (was physikalisch unmöglich sein könnte), oder wir könnten es ignorieren und auf das Beste hoffen. USB FS kann ziemlich nachsichtig sein, aber Ihre Erfahrung kann anders sein. Es wird wahrscheinlich in vielen Anwendungen funktionieren, aber es wird wahrscheinlich nicht dem USB-Standard entsprechen.
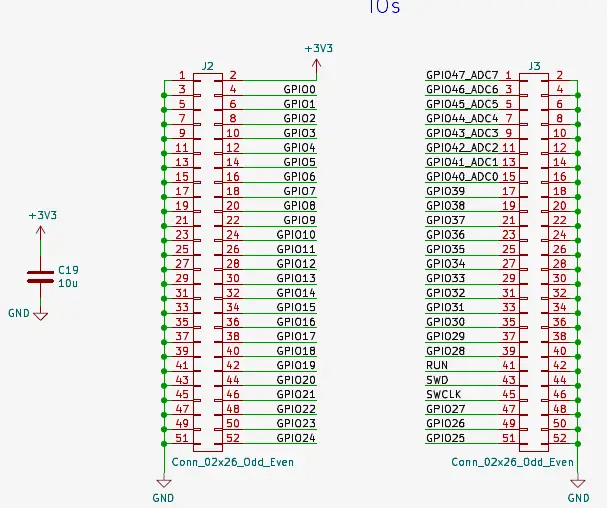
E/A-Header
Abbildung 12. Schematischer Abschnitt mit den 2.54-mm-E/A-Headern der QFN60-Version
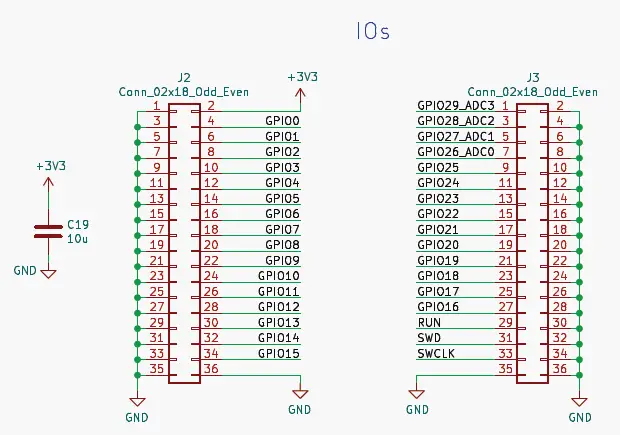
- Zusätzlich zum bereits erwähnten USB-Anschluss gibt es ein Paar zweireihiger 2.54-mm-Header (J2 und J3 in Abbildung 12), einen auf jeder Seite der Platine, an die der Rest der E/A angeschlossen wurde. Auf dem RP30A gibt es 2350 GPIO, während es auf dem RP48B 2350 GPIO gibt. Daher sind die Header auf dieser Version der Minimal-Platine größer, um die zusätzlichen Pins zu ermöglichen (siehe Abbildung 13).
- Da es sich um ein allgemeines Design handelt, bei dem keine spezielle Anwendung im Sinn ist, wurden die E/A so bereitgestellt, dass sie nach Wunsch des Benutzers angeschlossen werden können. Die innere Reihe von Pins auf jedem Header sind die E/A, und die äußere Reihe ist vollständig mit Masse verbunden. Es ist eine gute Praxis, viele Masseverbindungen an E/A-Anschlüssen anzubringen. Dies hilft, eine Masse mit niedriger Impedanz beizubehalten und bietet auch viele potenzielle Rückwege für Ströme, die zu und von den Anschlüssen fließen.
- E/A-Verbindungen. Dies ist wichtig, um elektromagnetische Störungen zu minimieren, die durch die Rückströme schnell schaltender Signale verursacht werden können, die lange Schleifenpfade benötigen, um den Schaltkreis zu schließen.
- Beide Header befinden sich auf demselben 2.54-mm-Raster, was den Anschluss dieser Platine an andere Dinge, wie z. B. Steckplatinen, erleichtert. Möglicherweise möchten Sie erwägen, nur einen einreihigen Header anstelle des zweireihigen Headers anzubringen und auf die äußere Reihe der Erdungsanschlüsse zu verzichten, um den Anschluss an eine Steckplatine zu erleichtern.
Abbildung 13. Schematischer Abschnitt mit den 2.54-mm-E/A-Headern der QFN80-Version
Debug-Anschluss
Abbildung 14. Schematischer Abschnitt, der den optionalen JST-Anschluss für SWD-Debug zeigt
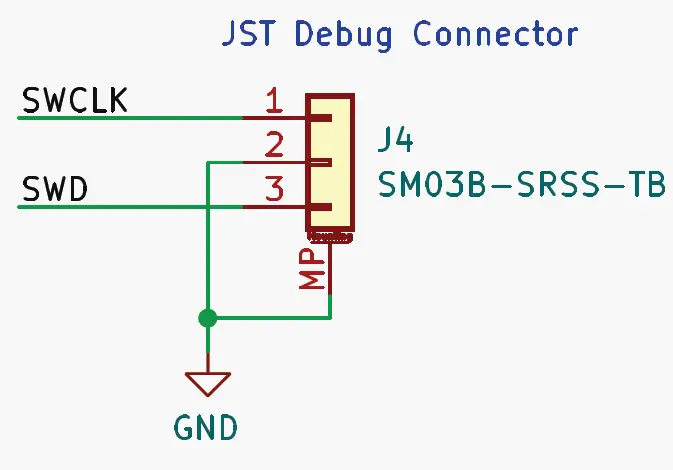
Für das On-Chip-Debugging möchten Sie möglicherweise eine Verbindung zur SWD-Schnittstelle des RP2350 herstellen. Die beiden Pins SWD und SWCLK sind auf dem 2.54-mm-Header J3 verfügbar, damit Sie die Debug-Sonde Ihrer Wahl problemlos anschließen können. Darüber hinaus habe ich einen optionalen JST-Header beigefügt, der eine einfache Verbindung zur Raspberry Pi Debug Probe ermöglicht. Sie müssen diesen nicht verwenden, die 2.54-mm-Header reichen aus, wenn Sie Software debuggen möchten, aber ich finde es bequemer, dies zu tun. Ich habe einen horizontalen Anschluss gewählt, hauptsächlich weil mir das Aussehen gefällt, auch wenn er nicht am Rand der Platine ist, aber vertikale sind verfügbar, wenn auch mit einem etwas anderen Platzbedarf.
Schaltflächen
Das Minimal-Design enthält jetzt nicht nur eine, sondern zwei Tasten, während die RP240-Version keine hatte. Eine ist für die USB-Boot-Auswahl, wie wir bereits besprochen haben, aber die zweite ist eine „Reset“-Taste, die an den RUN-Pin angeschlossen ist. Keine dieser Tasten ist unbedingt erforderlich (obwohl die BOOTSEL-Taste durch einen Header oder ähnliches ersetzt werden müsste, wenn der USB-Boot-Modus erforderlich wäre) und kann entfernt werden, wenn Platz oder Kosten ein Problem darstellen, aber sie machen die Verwendung des RP2350 auf jeden Fall zu einem weitaus angenehmeren Erlebnis.
Anhang A: Vollständiges Schema - RP2350A-Version
Abbildung 15. Vollständiges Schema des Minimaldesigns für RP2350A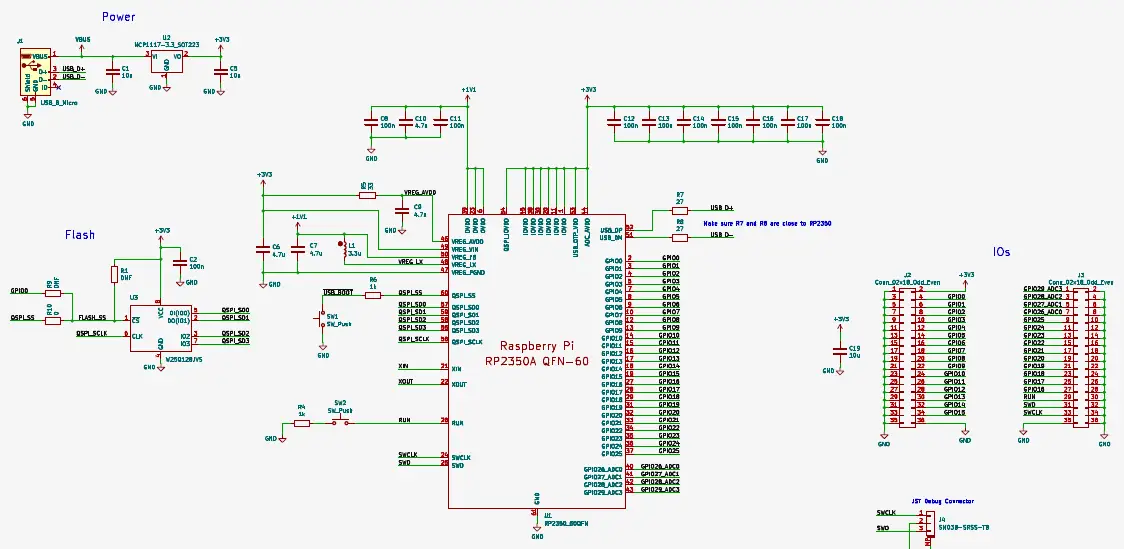
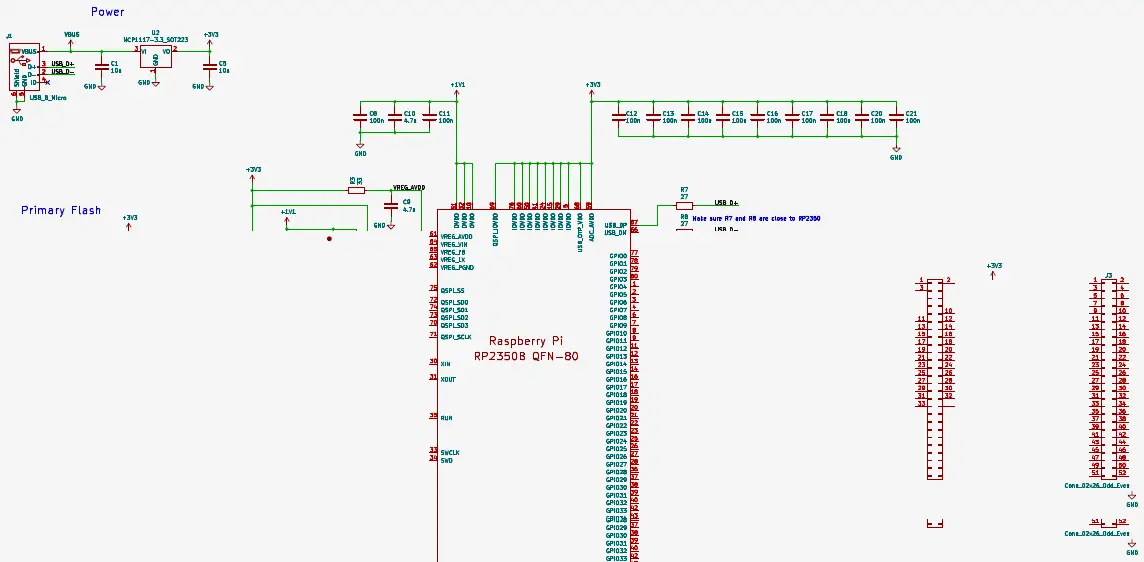
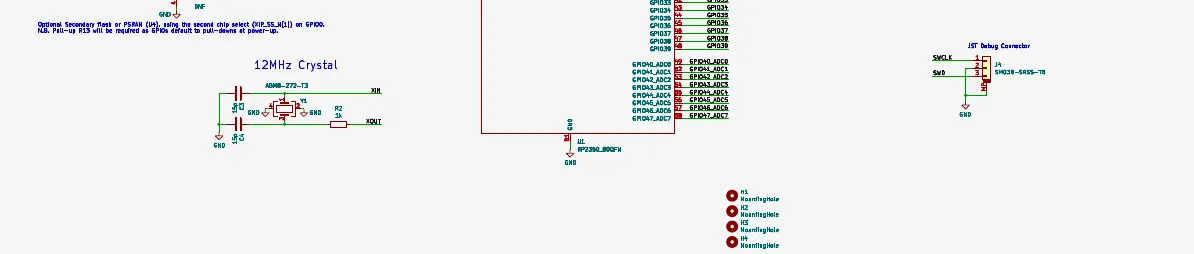
Anhang B: Vollständiges Schema - RP2350B-Version
Abbildung 16. Vollständiges Schema des Minimaldesigns für RP2350B
Anhang H: Versionsverlauf der Dokumentation
8. August 2024
Erstveröffentlichung.
ich Raspberry Pi
Raspberry Pi ist eine Marke von Raspberry Pi Ltd.
Raspberry Pi Ltd
Dokumente / Ressourcen
 |
Raspberry Pi SC1631 Raspberry Mikrocontroller [pdf] Bedienungsanleitung SC1631 Raspberry Mikrocontroller, SC1631, Raspberry Mikrocontroller, Mikrocontroller |



