![]()
Manwal sa Gumagamit sa Pickerbot Pro
Palihug timan-i nga ang mga hulagway nga gipakita kay para lamang sa mga katuyoan sa paghulagway*.
Mga awtor: Wayne Liu, Reilly Smithers
Hulyo 3, 2024
SUMMARY
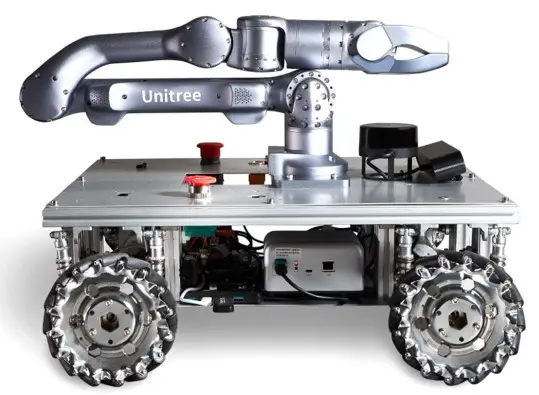
Ang Pickerbot Pro usa ka daghag gamit nga platform sa R&D robotics nga magamit alang sa lainlaing mga aplikasyon, sa gawas sama sa agrikultura, pagmina, ug konstruksyon, ug sa sulod sa balay, lakip ang logistik nga gitabangan sa robot, mga demonstrasyon sa pagpangita ug pagluwas, ug pagmapa.
Nagpakita sa Unitree Z1 Pro Robotic nga bukton nga adunay 740mm nga pagkab-ot ug 3kg nga kapasidad sa kargamento, ang Pickerbot Pro nagtanyag og impresibo nga artikulasyon nga adunay 6 nga degree sa kagawasan, kauban ang kusog nga feedback ug mga kapabilidad sa pagkakita sa bangga.
Gipaandar sa usa ka NVIDIA Jetson Orin nga serye nga single-board-computer (Nano o NX nga variant), naghatag kini og mas abante nga computer vision ug machine-learning nga mga buluhaton nga adunay gamhanang mga graphic o parallel computing functionality gamit ang CUDA, samtang nagpabilin ang usa ka compact ug lightweight nga disenyo.
Ang Pickerbot Pro nasangkapan sa usa ka Orbbec 3D Astra camera, nga naghatag og depth sensing, object tracking, ug gesture recognition capabilities.
Gitukod sa usa ka lig-on apan gaan nga chassis, ang Pickerbot Pro adunay usa ka 4WD nga sistema nga adunay independente nga suspensyon alang sa gipaayo nga pag-navigate sa dili patas nga yuta. Ang dagkong mga ligid sa mecanum naghatag ug tukma nga omnidirectional nga paglihok apan taas nga pagkupot.
Pangunang mga sangkap ug hardware
1.1 ROS 2 Controller: NVIDIA Jetson Orin (NX 8GB o Nano 4GB)
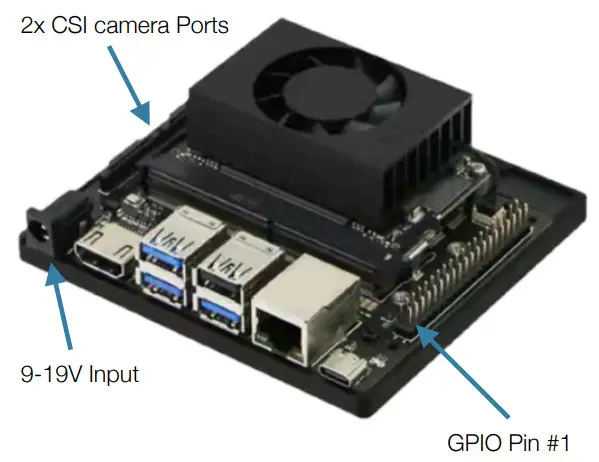
Ang onboard nga Jetson Orin nga single board computer naghatag ug gamhanan nga embedded computing sa Pickerbot Pro. Kini adunay 128gb SSD, Intel Wireless card ug onboard antennas, HDMI, upat ka USB port (3 niini ang USB 3.0), Ethernet, ug USB-C. Usa ka DC barrel jack aron magamit ang board, gamit ang taliwala sa 9-19V. Ang onboard GPIO pins naggamit sa samang batakang layout sama sa popular nga Raspberry Pi nga single board nga mga kompyuter, sugod sa Pin #1 sa gawas nga laray, kasikbit sa Ethernet port. Sa samang paagi, duha ka CSI camera connectors makahimo sa pag-andar sa Raspberry Pi brand ug susama nga small-form-factor camera.
Ang pre-installed software naglakip sa ROS 2 Humble, Ubuntu 22.04, ug NVIDIA Jetpack, nga makapahimo sa hingpit nga kapabilidad sa Orin platform.
Pahinumdom: Aron mapadayon ang pagkaangay sa tigkontrol sa chassis ug uban pang mga sangkap sa robot, wala namo girekomendar ang pag-flash sa Jetson Orin gamit ang lain-laing software. Para sa mas abante nga mga kaso sa paggamit palihog kontaka ang suporta sa Roboworks.
1.2 Sensing System: LiDAR & Depth Camera
Ang Pickerbot Pro nasangkapan sa usa ka Leishen M10 LSLiDAR. Uban sa 30m maximum detection range ug 12Hz rotational scanning frequency, ug taas nga signal-to-noise ratio, nga nagwagtang sa panginahanglan alang sa dugang nga pagsala. Naghiusa kini nga hapsay, naghatag maayo kaayo nga pagmapa ug mga kapabilidad sa pag-navigate.
Dugang pa, ang Pickerbot Pro nasangkapan sa usa ka Orbbec Astra Depth Camera, nga usa ka RGB depth camera. Ang kini nga camera gi-optimize alang sa lainlaing mga gamit lakip ang pagkontrol sa lihok, pagsubay sa kalabera, pag-scan sa 3D, pagkakita sa butang ug pag-uswag sa point cloud nga adunay ROS 2.
| Depth Resolution | RGB nga Resolusyon | Anggulo sa RGB Sense | Lalim nga FPS | RGB Framerate | Lalim nga Framerate | Lalim nga Sakup |
| 640 × 480 | 640 × 480 | 63.1 × 49.4 ° | 58 × 45.5 ° | 30fps | 30fps | 0.6~4m |
1.3 STM32 Control Board (Motor Control & IMU)
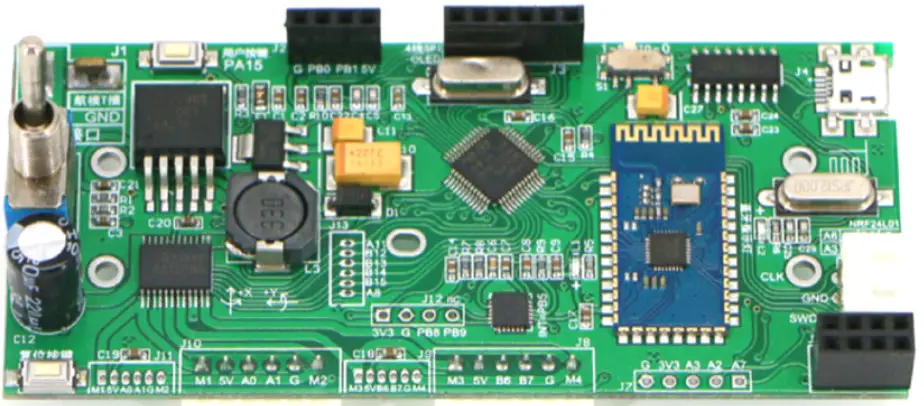
Alang sa chassis ug kontrol sa motor, ang Pickerbot Pro adunay usa ka STM32 control board. Kini nga board nagsiguro sa ubos nga konsumo sa kuryente, tukma nga pagkontrol sa motor, OLED readout display alang sa pagmonitor sa mga motor, ug usa ka inertial measurement unit (IMU). Mahimo kini nga i-configure alang sa labi ka espesyal nga operasyon, o aron mahimo ang feedback sa encoder sa controller sa Jetson Orin. Gamit ang software packages nga Keil ug FlyMCU para sa compilation ug sunod-sunod nga pag-flash sa STM32F103.
| STM32F103RC | Mga bahin |
| Core | ARM32-bit Cortex -M3 CPU Max speed sa 72 MHz |
| Mga handumanan | 512 KB sa Flash memory 64kB sa SRAM |
| Orasan, I-reset ug Pagdumala sa Suplay | 2.0 ngadto sa 3.6 V nga suplay sa aplikasyon ug I/Os |
| Gahum | Pagkatulog. Stop ug Standby modes V supply para sa RTC ug backup registers BAT |
| DMA | 12-channel nga DMA controller |
| Debug Mode | SWD ug JTAG mga interface Cortex-M3 Naka-embed nga Trace Macrocell |
| I/O nga mga pantalan | 51 I/O ports (mappable sa 16 external interrupt vectors ug 5V tolerant) |
| Mga timer | 4 × 16-bit nga mga timer 2 x 16-bit motor control PWM timers (uban ang emergency stop) 2 x watchdog timers (independente ug Window) SysTick timer (24-bit downcounter) 2 x 16-bit nga mga batakang timer aron mamaneho ang DAC |
| Interface sa Komunikasyon | USB 2.0 bug-os nga tulin nga interface SDIO interface CAN interface (2.0B Aktibo) |
1.4 Labaw sa Chassisview ug Mga Opsyon sa Baterya
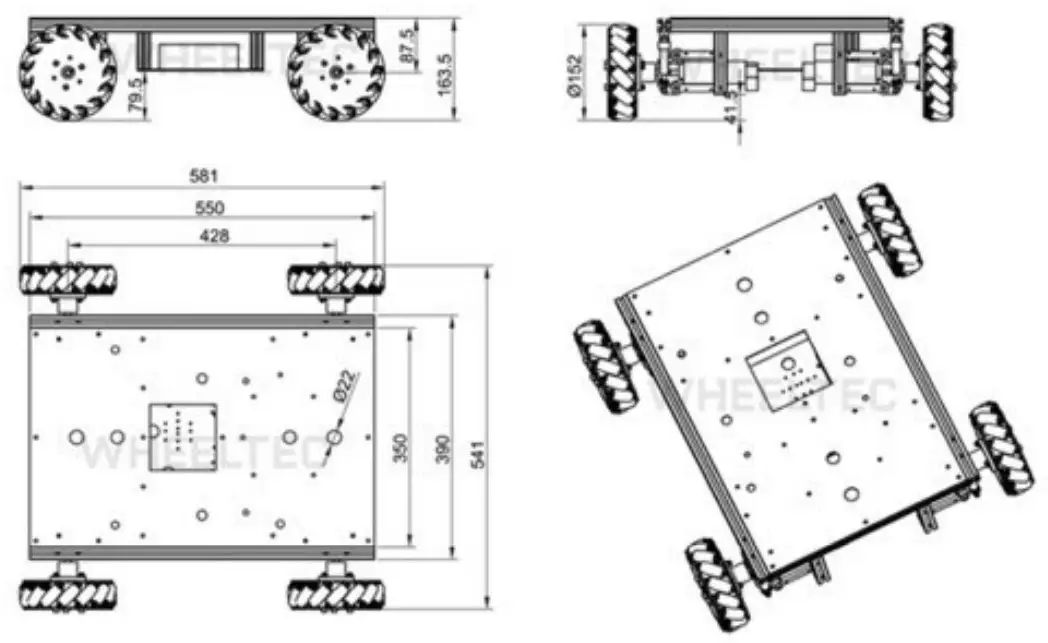
Ang Pickerbot Pro nasangkapan sa omnidirectional Mecanum nga mga ligid, ang matag usa adunay 45-degree nga offset roller nga nagpadali sa paglihok sa tanan nga direksyon. Mahinungdanon nga hinumdoman nga kini nga mga ligid gihatag sa mga parisan, nga ang matag pares adunay lahi nga gipunting nga mga roller. Atol sa pag-instalar sa robot, siguroha nga ang diagonal nga kaatbang nga mga ligid adunay mga roller nga nagpunting sa parehas nga direksyon. Kung wala damha nga molihok ang robot, balihon lang ang mga parisan sa mga ligid.
Ang mga konsiderasyon kinahanglang himoon sa dihang magdugang sa kapasidad sa baterya. Ang Pickerbot Pro moabut nga sumbanan nga adunay 5000 mAh nga baterya ug mahimong ma-upgrade sa 10,000 o 20,000 mAh nga mga kapilian alang sa dugang nga gasto. Ang 20,000 mAh nga baterya dako kaayo nga mohaum sulod sa chassis sa Pickerbot Pro ug mahimo ra nga i-install sa ibabaw sa robot chassis. Palihug tan-awa ang lamesa sa ubos alang sa gibug-aton ug gidak-on nga mga parameter.
| Parameter sa baterya | Mga bahin | ||
| 5000mAh | 10000mAh | 20000mAh | |
| Baterya Voltage | 22.2V | 22.2V | 22.2V |
| Gidak-on | 124*71*42mm | 124*71*71mm | 156*122*71mm |
| Power Charger | DC 5.5 Charging plug T-shaped nga discharge plug |
DC 5.5 Charging plug T-shaped nga discharge plug |
DC 5.5 Charging plug T-shaped nga discharge plug |
| Pagpasundayag | 15A padayon d ibayad |
30A padayon nga pagdiskarga | 60A padayon nga pagdiskarga |
| Timbang | 0.66kg | 1.25kg | 2.4kg |
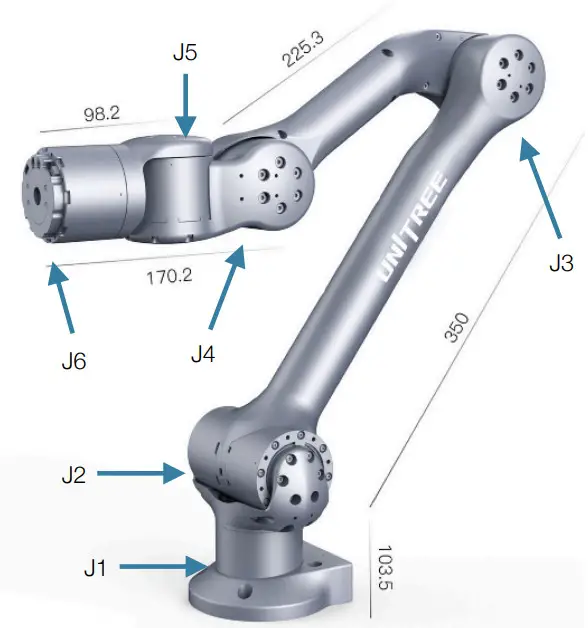
1.5 Unitree Z1 Pro Robotic Arm
Ang Pickerbot Pro naglakip sa Unitree Z1 Pro robotic arm, nga naghatag og impresibong articulation nga adunay 6 degrees sa kagawasan ug maabot nga 740mm. Palihog tan-awa ang joint parameter table sa ubos para sa pag-customize sa kinematics aron matubag ang imong piho nga mga kinahanglanon.
| hiniusang | Sakup sa Paglihok | Max Speed | Max Torque |
| J1 | ±150° | 180°/s | 33N·m |
| J2 | 0—180° | 180°/s | 33N·m |
| J3 | -165°—0 | 180°/s | 33N·m |
| J4 | ±80° | 180°/s | 33N·m |
| J5 | ±85° | 180°/s | 33N·m |
| J6 | ± 160 | 180°/s | 33N·m |
| Parameter | Z1 Pro |
| Timbang | 4.5kg |
| Payload | 3kg |
| Pag-abot | 740mm |
| Pagkabalikbalik | ~0.1mm |
| Suplay sa kuryente | 24V |
| Interface | Ethernet |
| Compatible nga operating system | Ubuntu |
| Maximum nga Gahum | 500W |
| Puwersa ang Feedback | Oo |
Software ug Pagsugod
2.1 ROS 2 Dali nga Pagsugod
Sa diha nga ang robot unang gipaandar, kini kontrolado sa ROS sa default. Buot ipasabot, ang STM32 chassis controller board midawat sa mga sugo gikan sa ROS 2 Controller - Ang Jetson Orin.
Ang inisyal nga setup dali ug sayon, gikan sa imong host PC (Ubuntu Linux girekomendar) makonektar sa Wi-Fi hotspot sa robot. Ang password sa default mao ang "dongguan".
Sunod, pagkonektar sa robot gamit ang SSH pinaagi sa terminal sa Linux, ang IP address mao ang 192.168.0.100, ang default nga password mao ang dongguan.
![]()
Uban sa terminal nga pag-access sa robot, mahimo kang mag-navigate sa ROS 2 workspace folder, ubos sa "wheeltec_ROS 2" Sa wala pa ang pagdagan sa mga programa sa pagsulay, pag-navigate sa wheeltec_ROS 2/turn_on_wheeltec_robot/ ug pangitaa ang wheeltec_udev.sh - Kini nga script kinahanglang ipadagan, kasagaran kausa lang aron masiguro ang husto nga pag-configure sa mga peripheral.
Mahimo nimong sulayan karon ang pagpaandar sa robot, aron ilunsad ang ROS 2 controller functionality, pagdagan: "roslaunch turn_on_wheeltec_robot turn_on_wheeltec_robot.launch"
![]()
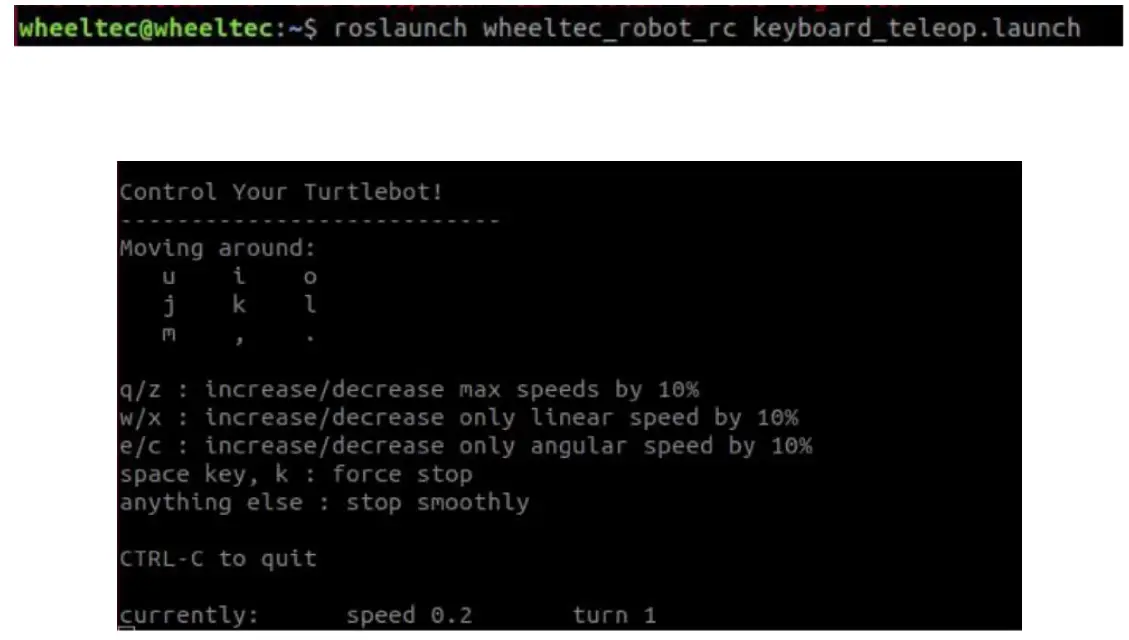
Sa ikaduha nga terminal, mahimo nimong gamiton ang keyboard_teleop node aron ma-validate ang kontrol sa chassis, kini usa ka giusab nga bersyon sa sikat nga ROS 2 Turtlebot example. Type: "roslaunch wheeltec_robot_rc keyboard_teleop.launch"
2.2 Pre-installed ROS 2 Packages alang sa chassis
Sa ubos mao ang mga mosunod nga user-oriented nga mga pakete, samtang ang uban nga mga pakete mahimong anaa, kini mga dependency lamang.
turn_on_wheeltec_robot
Kini nga pakete hinungdanon alang sa pagpaandar sa robot, ug komunikasyon sa tigkontrol sa chassis.
Ang nag-unang script nga "turn_on_wheeltec_robot.launch" kinahanglan gamiton sa matag boot aron ma-configure ang ROS 2 ug controller.
wheeltec_rviz2
Naglangkob sa mga file sa paglansad aron ilunsad ang rviz nga adunay naandan nga pag-configure alang sa Pickerbot Pro.
wheeltec_robot_slam
SLAM Mapping ug localization package nga adunay custom nga pag-configure para sa Pickerbot Pro.
wheeltec_robot_rrt2
Paspas nga pagsuhid sa random nga algorithm sa kahoy - Kini nga pakete nagtugot sa Pickerbot Pro sa pagplano sa usa ka agianan padulong sa gusto nga lokasyon, pinaagi sa paglansad sa mga node sa eksplorasyon.
wheeltec_robot_keyboard
Sayon nga pakete alang sa pag-validate sa pag-andar sa robot ug pagkontrol gamit ang keyboard, lakip ang gikan sa hilit nga host PC.
wheeltec_robot_nav2
ROS 2 Navigation 2 node package.
wheeltec_lidar_ROS 2
ROS 2 Lidar nga pakete alang sa pag-configure sa Leishen M10/N10.
wheeltec_joy
Joystick control package, adunay mga launch file para sa Joystick nodes.
simple_follower_ROS 2
Batakang butang ug linya nga nagsunod sa mga algorithm gamit ang laser scan o depth camera.
ROS 2_astra_camera
Astra depth camera nga pakete nga adunay mga drayber ug paglansad sa mga file.
Paghiusa sa robotic nga bukton
3.1 Mga sangkap sa mga kable sa robot nga bukton
Girekomenda sa Unitree Z1 ang mga Wiring
Sa ubos mao ang girekomendar nga mga wiring component para sa Unitree Z1 nga bukton. Kinahanglan adunay usa ka magamit nga babaye nga 2-pole dean connector sa usa ka breakout pagkahuman sa switch sa kuryente. Ikonektar ang mga sangkap sa serye. Siguroha nga ang connector +/GND connections motakdo. Ang blade fuse holder kinahanglan nga molingkod sa positibo nga linya sa kuryente.
| Component | Kadaghanon |
| Laki nga dean style 2 pole connector | x1 |
| Laki nga xt60 nga estilo 2 pole connector | x1 |
| Inline nga blade fuse holder | x1 |
| 14 AWG 2 core cable | x1 |
| 7.5 Blade fuse | x1 |
Ingon nga ang bukton adunay mga paryente ra nga mga encoder kinahanglan kini i-reset sa parehas nga posisyon sa matag pagsugod. Mahimo nimong makita nga mapuslanon ang paglakip sa usa ka switch sa serye sa cable aron dali nga ma-on ug ma-off ang bukton alang sa pag-reset.
NOTA: Ang dokumentasyon sa Unitree nag-ingon nga ang bukton gi-rate alang sa 20A. Kini dili husto. Usa ka 10A SMD fuse ang gilakip sa serye alang sa matag suplay sa kuryente. Ang paggamit sa usa ka 7.5A fuse mohuyop sa wala pa ang 10A SMD fuse ug labi ka dali nga ilisan.
NOTA: Tungod sa dugang nga gibug-aton sa unitree Z1 nga bukton sa sistema ang atubangan nga mga tubod dili makasuporta sa bukton. Ang drop-in 70mm * 16mm compression springs makit-an ug magamit puli sa stock spring. Sa laing bahin, ang dagkong mga tubod nga naglangkob sa shock mahimong gamiton.
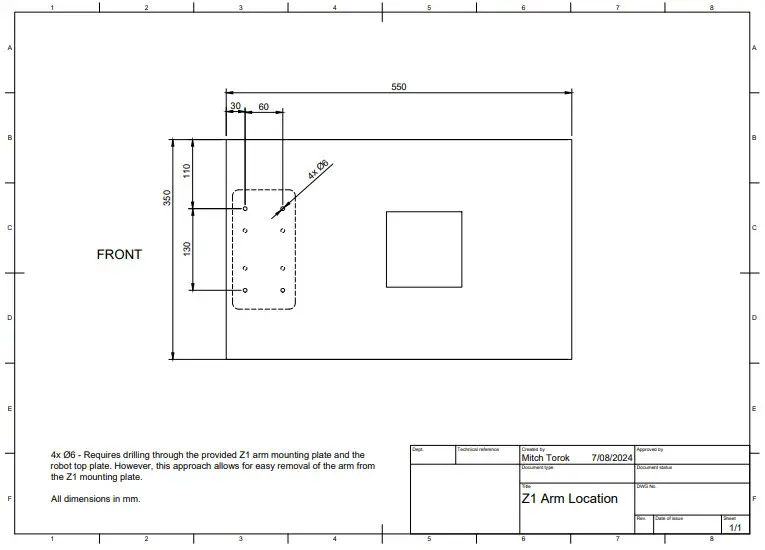
3.2 Mga drawing sa robotic arm mounting
3.3 Sample code alang sa robotic nga bukton
Sa panahon nga kini nga Manwal sa Gumagamit giandam, ang Unitree's SDK para sa Z1 Pro nagsuporta lamang sa ROS 1 Melodic o Noetic.
Ang grupo sa produkto sa Pickerbot Pro nakahimo og sample code sa ROS 2 Mapainubsanon nga compatible sa chassis.
Ang sampAng code aron i-integrate ang Z1 Pro robotic arm sa chassis makita gikan sa ubos nga GitHub respository:
https://github.com/roboworksdev/pickerbotproarm
www.roboworks.net
Copyright © 2024 Roboworks. Tanang katungod gigahin.
Mga Dokumento / Mga Kapanguhaan
 |
ROBOWORKS Pickerbot Pro Pagpili ug Pag-drop sa Mobile Robot [pdf] Manwal sa Gumagamit Pickerbot Pro, Pickerbot Pro Pilia ug Ihulog ang Mobile Robot, Pilia ug Ihulog ang Mobile Robot, Ihulog ang Mobile Robot, Mobile Robot, Robot |