The SpinWave Robot uses gyroscope technology to monitor the cleaning process, driving in overlapping rows and keeping track of where it’s cleaned
Once the robot thinks it’s cleaned the middle portion of the accessible space it will drive along the walls to clean the edges before seeking the dock signal to recharge
The robot may return to the dock if it thinks it’s cleaned the entire accessible area, sometimes before the entire battery is consumed
If robot is returning to dock early, or not able to return to the dock, please re-locate the docking station according to User Guide specifications
Remove obstacles that may cause the robot to become stuck or drive with difficulty to improve cleaning coverage and performance
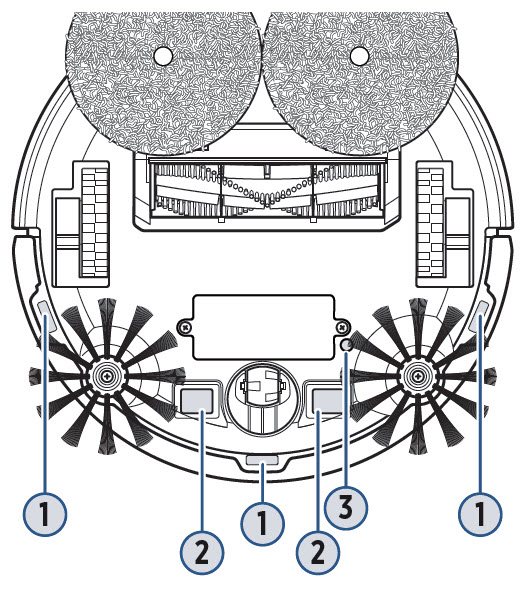
Clean sensors on robot with a dry cloth
With all wheels on the floor, turn machine on and off using the power switch on the side of machine
Certain floor types or obstacles may affect how smoothly the robot can drive and use the gyroscope technology for orientation
The robot will attempt to continue cleaning in overlapping rows however some situations may cause a disruption to the pattern
Let the robot complete the cleaning run as navigation issues can often be resolved as the robot continues cleaning
If your SpinWave Robot is getting stuck in a small area > Go to Stuck in Small Area