![]()
ሽቦ አልባ የፍጥነት መለኪያ እና የገጽታ ሙቀት ዳሳሽ
ገመድ አልባ የፍጥነት መለኪያ እና
የገጽታ ሙቀት ዳሳሽ
ሞዴል፡ R718E
የተጠቃሚ መመሪያ
የቅጂ መብት©Netvox Technology Co., Ltd.
ይህ ሰነድ የ NETVOX ቴክኖሎጂ ንብረት የሆነውን የባለቤትነት ቴክኒካዊ መረጃ ይ containsል። በ NETVOX ቴክኖሎጂ የጽሑፍ ፈቃድ ሳይኖር በጥብቅ መተማመን የተጠበቀ እና ለሌሎች ወገኖች ሙሉ በሙሉ ወይም በከፊል አይገለጽም። ዝርዝሮቹ ያለ ቅድመ ማስጠንቀቂያ ሊለወጡ ይችላሉ።
መግቢያ
R718E እንደ LoRaWAN ClassA መሳሪያ በሶስት ዘንግ ማጣደፍ፣ ሙቀት እና ከLoRaWAN ፕሮቶኮል ጋር ተኳሃኝነት አለው።
መሳሪያው በመግቢያው ላይ ሲንቀሳቀስ ወይም ሲንቀጠቀጥ ወዲያውኑ የ X፣ Y እና Z መጥረቢያዎችን የሙቀት መጠን፣ ፍጥነት እና ፍጥነት ያሳያል።
ሎራ ገመድ አልባ ቴክኖሎጂ;
ሎራ የረዥም ርቀት እና ዝቅተኛ የሃይል ፍጆታ ላይ የተመሰረተ ገመድ አልባ የመገናኛ ቴክኖሎጂ ነው። ከሌሎች የመገናኛ ዘዴዎች ጋር ሲነጻጸር, የሎራ ስርጭት ስፔክትረም ማሻሻያ ዘዴ የግንኙነት ርቀትን ለማስፋት በከፍተኛ ሁኔታ ይጨምራል.
በረጅም ርቀት፣ ዝቅተኛ-ውሂብ ገመድ አልባ ግንኙነቶች በሰፊው ጥቅም ላይ የዋለ። ለ example ፣ አውቶማቲክ ሜትር ንባብ ፣ የግንባታ አውቶማቲክ መሣሪያዎች ፣ ሽቦ አልባ የደህንነት ስርዓቶች ፣ የኢንዱስትሪ ክትትል። ዋናዎቹ ባህሪዎች አነስተኛ መጠን ፣ ዝቅተኛ የኃይል ፍጆታ ፣ የማስተላለፊያ ርቀት ፣ የፀረ-ጣልቃ-ገብነት ችሎታ እና የመሳሰሉትን ያካትታሉ።
ሎራዋን ፦
ሎራዋን ከተለያዩ አምራቾች በመጡ መሳሪያዎች እና በሮች መካከል ያለውን መስተጋብር ለማረጋገጥ ከጫፍ እስከ ጫፍ መደበኛ ዝርዝሮችን ለመግለጽ የሎራ ቴክኖሎጂን ይጠቀማል።
መልክ 
ዋና ዋና ባህሪያት
- SX1276 ገመድ አልባ የግንኙነት ሞዱል ይተግብሩ
- 2 ክፍሎች ER14505 3.6V ሊቲየም AA መጠን ባትሪ
- የ X፣ Y እና Z መጥረቢያዎችን ፍጥነት እና ፍጥነት ፈልግ
- መሰረቱ ከፌሮማግኔቲክ ቁስ አካል ጋር ሊጣበቅ በሚችል ማግኔት ተያይዟል
- የጥበቃ ደረጃ IP65/IP67 (አማራጭ)
- ከLoRaWANTMClas A ጋር ተኳሃኝ
- የድግግሞሽ-ሆፒንግ ስርጭት ስፔክትረም ቴክኖሎጂ
- የማዋቀሪያ መለኪያዎች በሶስተኛ ወገን የሶፍትዌር መድረኮች በኩል ሊዋቀሩ ይችላሉ ፣ መረጃ ሊነበብ እና ማንቂያዎች በኤስኤምኤስ ጽሑፍ እና በኢሜል ሊዘጋጁ ይችላሉ (አማራጭ)
- የሚገኝ የሶስተኛ ወገን መድረክ: እንቅስቃሴ / ThingPark ፣ TTN ፣ MyDevices / Cayenne
- ዝቅተኛ የኃይል ፍጆታ እና ረጅም የባትሪ ህይወት;
እባክዎን ይመልከቱ web: http://www.netvox.com.tw/electric/electric_calc.html
በዚህ ላይ webጣቢያ, ተጠቃሚዎች በተለያዩ ውቅሮች ላይ ለተለያዩ ሞዴሎች የባትሪ ዕድሜን ማግኘት ይችላሉ.
- ትክክለኛው ክልል እንደ አካባቢው ሊለያይ ይችላል።
- የባትሪ ዕድሜ የሚወሰነው በአነፍናፊ ሪፖርት ድግግሞሽ እና ሌሎች ተለዋዋጮች ነው።
መመሪያን ያዋቅሩ
አብራ/አጥፋ
| አብራ | ባትሪዎችን አስገባ. (ተጠቃሚዎች ለመክፈት ስክሬድራይቨር ሊያስፈልጋቸው ይችላል) |
| ማዞር | አረንጓዴው አመልካች አንዴ ብልጭ እስኪል ድረስ የተግባር ቁልፉን ለ3 ሰከንድ ተጭነው ይያዙ። |
| አጥፋ (ወደ ፋብሪካ ቅንብር እነበረበት መልስ) | የተግባር ቁልፍን ለ 5 ሰከንዶች ተጭነው ይያዙ ፣ እና አረንጓዴው አመልካች 20 ጊዜ ብልጭ ድርግም ይላል። |
| ኃይል አጥፋ | ባትሪዎችን አስወግድ. |
| ማስታወሻ፡- | 1. ባትሪውን አውጥተው አስገባ; መሣሪያው በነባሪነት ከአገልግሎት ውጪ ነው። 2. የማብራት/የማጥፋት ክፍተት የ capacitor inductance እና ሌሎች የኢነርጂ ማከማቻ አካላትን ጣልቃ ገብነት ለማስወገድ 10 ሰከንድ ያህል እንዲሆን ይመከራል። 3. ከማብራት በኋላ የመጀመሪያዎቹ 5 ሰከንዶች, መሳሪያው በምህንድስና ሙከራ ሁነታ ላይ ይሆናል. |
የአውታረ መረብ መቀላቀል
| አውታረ መረቡን በጭራሽ አትቀላቀልም። | አውታረ መረቡን ለመፈለግ መሣሪያውን ያብሩ። አረንጓዴው አመላካች ለ 5 ሰከንድ ይቆያል: ስኬት አረንጓዴ አመላካች ጠፍቷል ይቀራል - አይሳካም |
| ኔትወርኩን ተቀላቅለው ነበር። | የቀደመውን አውታረ መረብ ለመፈለግ መሣሪያውን ያብሩ። አረንጓዴው አመላካች ለ 5 ሰከንድ ይቆያል: ስኬት አረንጓዴ አመላካች ጠፍቷል ይቀራል - አይሳካም |
የተግባር ቁልፍ
| ለ 5 ሰከንዶች ተጭነው ይያዙ | ወደ ፋብሪካው መቼት ይመልሱ / ያጥፉ አረንጓዴው አመላካች 20 ጊዜ ብልጭ ድርግም ይላል: ስኬት አረንጓዴ አመላካች ጠፍቷል ይቀራል - አይሳካም |
| አንዴ ይጫኑ | መሳሪያው በአውታረ መረቡ ውስጥ ነው፡ አረንጓዴ አመልካች አንዴ ብልጭ ድርግም ይላል እና ሪፖርት ይልካል መሣሪያው በአውታረ መረቡ ውስጥ የለም: አረንጓዴው ጠቋሚ ጠፍቶ ይቆያል |
የእንቅልፍ ሁኔታ
| መሣሪያው በርቷል እና በአውታረ መረቡ ውስጥ ነው | የእንቅልፍ ጊዜ፡ ደቂቃ ክፍተት። የሪፖርቱ ለውጥ የቅንብር እሴቱ ሲያልፍ ወይም ስቴቱ ሲቀየር፡ በ Min Interval መሰረት የውሂብ ሪፖርት ይላኩ። |
ዝቅተኛ ጥራዝtagሠ ማስጠንቀቂያ
| ዝቅተኛ ጥራዝtage | 3.2 ቪ |
የውሂብ ሪፖርት
መሳሪያው የሙቀት መጠን፣ የባትሪ ቮልት ጨምሮ ከሁለት አገናኞች ፓኬቶች ጋር የስሪት ፓኬት ሪፖርት ወዲያውኑ ይልካልtagሠ፣ የ X፣ Y እና Z መጥረቢያዎች ፍጥነት እና ፍጥነት።
በእነዚህ ሁለት ፓኬቶች መካከል ያለው የጊዜ ክፍተት 10 ሴኮንድ ይሆናል.
ማንኛውም ውቅረት ከመደረጉ በፊት መሣሪያው በነባሪ ውቅረት ውስጥ ውሂብ ይልካል።
ነባሪ ቅንብር፡
MaxTime: ከፍተኛ ክፍተት = 60 ደቂቃ = 3600s
MinTime: ከፍተኛ ክፍተት = 60 ደቂቃ = 3600s
የባትሪ ለውጥ = 0x01 (0.1 ቪ)
የፍጥነት ለውጥ = 0x0003
ገቢር ገደብ = 0x0003
InActiveThreshold = 0x0002
RestoreReportSet = 0x00 (አነፍናፊ ወደነበረበት ሲመለስ ሪፖርት አታድርጉ)
የሶስት ዘንግ ፍጥነት እና ፍጥነት;
የመሳሪያው ባለ ሶስት ዘንግ ማጣደፍ ከActiveThreshold ካለፈ፣ ሪፖርት ወዲያውኑ ይላካል። የሶስት ዘንግ ማጣደፍ እና ፍጥነት ከተዘገበ በኋላ የሶስት ዘንግ የመሳሪያው ፍጥነት ከ InActiveThreshold ያነሰ መሆን አለበት, የሚቆይበት ጊዜ ከ 5s በላይ ነው (ሊቀየር አይችልም), እና ንዝረቱ ሙሉ በሙሉ ይቆማል, ቀጣዩ ፍለጋ ይጀምራል. ሪፖርቱ ከተላከ በኋላ በዚህ ሂደት ውስጥ ንዝረቱ ከቀጠለ, ጊዜው እንደገና ይጀምራል. መሣሪያው ሁለት ጥቅል ውሂብን ይልካል. አንደኛው የሶስቱ መጥረቢያዎች መፋጠን ሲሆን ሁለተኛው የሶስቱ መጥረቢያ እና የሙቀት መጠን ፍጥነት ነው. በሁለቱ ፓኬቶች መካከል ያለው የጊዜ ክፍተት 10 ሴ.
ማስታወሻ፡-
(1) የመሳሪያው የሪፖርት ክፍተቱ ሊለያይ በሚችለው በነባሪው ፈርምዌር መሰረት ይዘጋጃል።
(2) በሁለቱ ዘገባዎች መካከል ያለው የጊዜ ልዩነት ዝቅተኛው ጊዜ መሆን አለበት.
እባክዎን Netvox LoRaWAN የመተግበሪያ ትዕዛዝ ሰነድ እና Netvox Lora Command Resolverን ይመልከቱ http://loraresolver.netvoxcloud.com:8888/page/index አፕሊኬሽን ውሂብን ለመፍታት።
የውሂብ ሪፖርት ማዋቀር እና የመላኪያ ጊዜ እንደሚከተለው ነው
| ደቂቃ ክፍተት (ክፍል፡ ሰከንድ) | ከፍተኛው ክፍተት (ክፍል፡ ሰከንድ) | ሪፖርት ሊደረግ የሚችል ለውጥ | የአሁኑ ቻኑ> ሪፖርት ሊደረግ የሚችል ለውጥ |
የአሁኑ ለውጥ < ሪፖርት ሊደረግ የሚችል ለውጥ |
| በ1-65535 መካከል ያለ ማንኛውም ቁጥር | በ1-65535 መካከል ያለ ማንኛውም ቁጥር | 0 መሆን አይችልም። | Eger Min Interval ሪፖርት ያድርጉ | ሪፖርት በየከፍተኛው ክፍተት |
ActiveThreshold እና InActiveThreshold
| ፎርሙላ | ንቁ ገደብ (ወይም I nActiveThreshold) = ወሳኝ እሴት - 9.8 - 0.0625 * በመደበኛ የከባቢ አየር ግፊት ላይ ያለው የስበት ፍጥነት 9.8 ሜትር / ሰ 2 * የመነሻው መጠን 62.5 mg |
| ገቢር ገደብ | ገባሪ ገደብ በ ConfigureCmd ሊቀየር ይችላል። ገባሪ ገደብ ክልል 0x0003-0x0ጠፍቷል (ነባሪው 0x0003 ነው); |
| ገቢር ያልሆነ ገደብ | ንቁ ያልሆነ ገደብ በ ConfigureCmd ሊቀየር ይችላል። ገቢር ያልሆነ ገደብ ክልል 0x0002-0x0ጠፍቷል (ነባሪው 0x0002 ነው) |
| Example | ወሳኝ እሴቱ ወደ 10ሜ/ሴኮንድ ተቀናብሯል ብለን በማሰብ፣ የሚቀናበረው ገባሪ ገደብ (ወይም ንቁ ያልሆነ ገደብ) 2/10/9.8=0.0625 ነው። ኢንቲጀር እንደ 16 የሚዋቀር ገቢር ገደብ (ወይም InActiveThreshold)። ማሳሰቢያ፡ ሲዋቀር የነቃው ገደብ ከስራ አልባው ገደብ የበለጠ መሆን እንዳለበት ያረጋግጡ። |
መለካት
የፍጥነት መለኪያው በነፃነት መንቀሳቀስ የሚችሉ ክፍሎችን የያዘ ሜካኒካል መዋቅር ነው።
እነዚህ ተንቀሳቃሽ ክፍሎች ከጠንካራ-ግዛት ኤሌክትሮኒክስ በጣም የራቁ ለሜካኒካዊ ጭንቀት በጣም ስሜታዊ ናቸው።
የ 0g ማካካሻ አስፈላጊ የፍጥነት መለኪያ አመልካች ነው ምክንያቱም ማጣደፍን ለመለካት የሚጠቅመውን መነሻ ስለሚገልጽ ነው።
R718E ን ከጫኑ በኋላ ተጠቃሚዎች መሳሪያውን ለ1 ደቂቃ እንዲያርፍ እና ከዚያ እንዲበራ ማድረግ አለባቸው። ከዚያ መሣሪያውን ያብሩ እና መሣሪያው ወደ አውታረ መረቡ ለመቀላቀል 1 ደቂቃ እስኪወስድ ድረስ ይጠብቁ። ከዚያ በኋላ መሣሪያው በራስ-ሰር ማስተካከያውን ያከናውናል.
ከተስተካከለ በኋላ፣ የተዘገበው የሶስት ዘንግ ማጣደፍ ዋጋ በ1ሜ/ሴኮንድ ውስጥ ይሆናል።
ፍጥነቱ በ 1 ሜትር / ሰ 2 ውስጥ ሲሆን ፍጥነቱ በ 160 ሚሜ / ሰ ውስጥ ሲሆን መሳሪያው የማይንቀሳቀስ መሆኑን ሊፈረድበት ይችላል.
የ R718E X፣ Y፣ Z-ዘንግ አቅጣጫ 
Exampየውሂብ ውቅር le
FPort : 0x07
| ባይት | 1 | 1 | ቫር (ጥገና = 9 ባይት) |
| ሲኤምዲአይዲ | የመሣሪያ ዓይነት | NetvoxPayLoadData |
ሲኤምዲዲ- 1 ባይት
የመሳሪያ ዓይነት - 1 ባይት - የመሳሪያ ዓይነት
NetvoxPayLoadData– var ባይት (ከፍተኛ=9ባይት)
| መግለጫ | መሳሪያ | und ID |
መሳሪያ ዓይነት |
NetvoxPayLoadData | ||||||||||||||
| ConfigReport ሬክ |
R7Is11 | ኦስ 0I | ኦክስ አይሲ | ሚኒም (2ባይት ክፍል:s) | ማክስሜ (2 ባይት ክፍሎች) | የባትሪ ለውጥ (I ባይት ዩኒት 0.1v) | የፍጥነት ለውጥ (2ባይት ክፍል፡m/s2) |
የተያዘ (2ባይት፣ ቋሚ ኦክስ00) | ||||||||||
| ሁኔታ(0x00_ስኬት) | የተያዘ (8ባይት፣ ቋሚ ኦክስ00) | |||||||||||||||||
| ኦክስ8 I | ||||||||||||||||||
| ConfigReport Rp |
||||||||||||||||||
| የተያዘ (9ባይት፣ ቋሚ ኦክስ00) | ||||||||||||||||||
| 0x02 | ||||||||||||||||||
| አንብብ Config RcportReq |
||||||||||||||||||
| ሚኒም (2ባይት ክፍሎች) | ከፍተኛ (2ባይት ገደብ:s) | የባትሪ ለውጥ (I ባይት ክፍል፡0.1v) | የፍጥነት ለውጥ (2ባይት ክፍል፡m/s2) |
የተያዘ (2 ባይት፣ ቋሚ ኦክስ00) |
||||||||||||||
| በሬ ፣ | ||||||||||||||||||
| አንብብ Config ጋዜጠኞች |
||||||||||||||||||
| ገቢር ገደብ (2 ባይት) |
ንቁ ያልሆነ ገደብ (2 ባይት) |
የተያዘ 5ባይት፣ ቋሚ ኦክስ00) | ||||||||||||||||
| 0x03 | ||||||||||||||||||
| አዘጋጅ ThresholdReq |
||||||||||||||||||
| ሁኔታ (0x00 ስኬት) |
የተያዘ (SBytes፣ ቋሚ Ox00) | |||||||||||||||||
| 0x83 | ||||||||||||||||||
| አዘጋጅ ገደብ Rsp |
||||||||||||||||||
| የተያዘ (9ባይት፣ ቋሚ ኦክስ00) | ||||||||||||||||||
| 0x04 | ||||||||||||||||||
| ንቁ ይሁኑ ThresholdReq |
||||||||||||||||||
| ገቢር ገደብ (2ባይት) | ንቁ ያልሆነ ገደብ (2ባይት) | የተያዘ (ባይት፣ ቋሚ Ox00) | ||||||||||||||||
| አይ.; | ||||||||||||||||||
| ንቁ ይሁኑ ገደብ Rsp |
||||||||||||||||||
- የመሣሪያ መለኪያዎችን ያዋቅሩ MinTime = 1min, MaxTime = 1min, BatteryChange = 0.1v, Acceleratedvelocitychange = 1m/s2
ዳውንሊንክ፡ 011C003C003C0100010000 003ሲ(ሄክስ) = 60(ታህሳስ)
መሣሪያ ተመላሾች: 811C000000000000000000 (ውቅር ስኬታማ ነው)
811C010000000000000000 (ውቅር አልተሳካም) - የመሣሪያ መለኪያዎችን ያንብቡ
ዳውንሊንክ፡ 021C000000000000000000
መሣሪያ ተመላሾች፡ 821C003C003C0100010000 (የአሁኑ መሣሪያ መለኪያዎች) - የንቁ ገደብ ወደ 10ሜ/ሴኮንድ ተቀናብሯል ብለን ከወሰድን የሚዋቀረው ዋጋ 2/10/9.8=0.0625 ሲሆን የመጨረሻው የተገኘው ዋጋ ኢንቲጀር ነው እና እንደ 16.32 የተዋቀረ ነው።
InActive Threshold ወደ 8m/s2 ተቀናብሯል ብለን ከወሰድን የሚዋቀረው ዋጋ 8/9.8/0.0625=13.06 ሲሆን የመጨረሻው የተገኘው ዋጋ ኢንቲጀር ነው እና እንደ 13 ተዋቅሯል።
የመሣሪያ መለኪያዎችን ActiveThreshold=16፣ InActiveThreshold=13 አዋቅር
ዳውንሎድ፡ 031C0010000D0000000000
መሣሪያ ተመላሾች፡ 831C000000000000000000 (ውቅር ስኬታማ ነው)
831C010000000000000000 (ውቅር አልተሳካም)
የመሣሪያ መለኪያዎችን ያንብቡ
ዳውንሊንክ፡ 041C000000000000000000
መሣሪያ ተመላሾች፡ 841C0010000D0000000000 (የአሁኑ መሣሪያ መለኪያ)Restore ReportReq አር 718 ኢ 0x07 0x1 ሴ RestoreportSet(1ባይት) 0x00_አነፍናፊ ወደነበረበት ሲመለስ ሪፖርት አታድርግ፣ 0x01_አንዳሳሽ ወደነበረበት ሲመለስ ሪፖርት አድርግ የተያዘ (8 ባይት ፣ ቋሚ 0x00) Restore Report Rsp 0x87 ሁኔታ (0x00_ ተሳክቷል) የተያዘ (8 ባይት ፣ ቋሚ 0x00) GetRestor ReportReq 0x08 የተያዘ (9 ባይት ፣ ቋሚ 0x00) ወደነበረበት መልስ Rsp 0x88 RestoreportSet(1ባይት) 0x00_ዳሳሽ ወደነበረበት ሲመለስ ሪፖርት አታድርጉ፣ ዳሳሹን ወደነበረበት ሲመለስ 0x01_አሳይ ሪፖርት ያድርጉ የተያዘ (8ባይት፣ ቋሚ 0x00) - ዳሳሽ ወደነበረበት ሲመለስ የDO ሪፖርትን ያዋቅሩ (ንዝረቱ ሲቆም R718E አፕሊንክ ጥቅል ሪፖርት ያደርጋል)
ዳውንሊንክ፡ 071C010000000000000000
የመሣሪያ መመለሻ፡ 871C000000000000000000 (የማዋቀር ስኬት)
871C010000000000000000 (የማዋቀር ውድቀት) - የመሣሪያ መለኪያዎችን ያንብቡ
ዳውንሊንክ፡ 081C000000000000000000
የመሣሪያ መመለሻ፡ 881C010000000000000000 (የአሁኑ መሣሪያ መለኪያ)
Example ለ MinTime/MaxTime አመክንዮ
Exampለ#1 በ MinTime = 1 Hour, MaxTime= 1 Hour, ሪፖርት ሊደረግ የሚችል ለውጥ ማለትም BatteryVoltageChange = 0.1V

ማስታወሻ፡- MaxTime=የደቂቃ ጊዜ። በባትሪቮል ምንም ይሁን ምን ውሂብ እንደ Maxime (MinTime) ቆይታ ብቻ ነው የሚዘገበውtagየኢ-Change እሴት።
Exampለ#2 በ MinTime = 15 ደቂቃዎች ፣ MaxTime = 1 ሰዓት ፣ ሪፖርት የተደረገ ለውጥ ማለትም BatteryVol ላይ የተመሠረተtageChange = 0.1V. 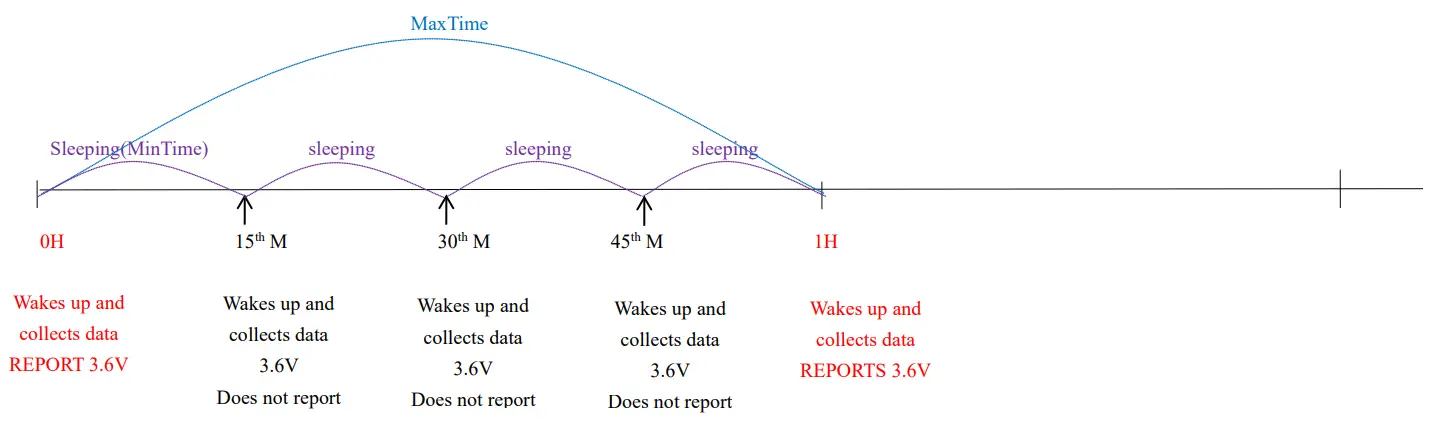
Exampለ#3 በ MinTime = 15 ደቂቃዎች ፣ MaxTime = 1 ሰዓት ፣ ሪፖርት የተደረገ ለውጥ ማለትም BatteryVol ላይ የተመሠረተtageChange = 0.1V.

ማስታወሻዎች :
- መሣሪያው ከእንቅልፉ ሲነቃ እና ውሂብን ብቻ ያከናውናልampበ MinTime Interval መሠረት ሊንግ. በሚተኛበት ጊዜ, መረጃ አይሰበስብም.
- የተሰበሰበው መረጃ ከመጨረሻው ሪፖርት ጋር ተነጻጽሯል። የውሂብ ልዩነቱ ከ ReportableChange እሴት የሚበልጥ ከሆነ መሳሪያው በ MinTime የጊዜ ክፍተት መሰረት ሪፖርት ያደርጋል። የመረጃው ልዩነት ከተዘገበው የመጨረሻ መረጃ የማይበልጥ ከሆነ መሳሪያው በ Maxime ክፍተት መሰረት ሪፖርት ያደርጋል።
- የ MinTime Interval ዋጋን በጣም ዝቅተኛ ማቀናበር አንመክርም። የ MinTime Interval በጣም ዝቅተኛ ከሆነ መሳሪያው በተደጋጋሚ ይነሳል እና ባትሪው በቅርቡ ይጠፋል.
- መሣሪያው ሪፖርት በላከ ቁጥር፣ ከውሂብ ልዩነት፣ ከተገፋ አዝራር ወይም ከMaxime ክፍተት ምንም ለውጥ ቢመጣም፣ ሌላ የ MinTime/Maxime ስሌት ዑደት ይጀምራል።
Example ትግበራ
ጄነሬተሩ በመደበኛነት እየሰራ መሆኑን ለመለየት, ጄነሬተሩ ሃይል ጠፍቶ እና በማይንቀሳቀስ ሁኔታ ላይ እያለ R718E አግድም መጫን ይመከራል. R718E ን ከጫኑ እና ካስተካከሉ በኋላ እባክዎን መሳሪያውን ያብሩት። መሣሪያው ከተቀላቀለ ከአንድ ደቂቃ በኋላ R718E የመሳሪያውን መለኪያ ያከናውናል (መሣሪያው ከተስተካከለ በኋላ ሊንቀሳቀስ አይችልም. መንቀሳቀስ ካለበት መሳሪያውን ለ 1 ደቂቃ ማጥፋት/ ማጥፋት አለበት, እና ከዚያም ማስተካከያው እንደገና ይከናወናል). R718E የሶስት ዘንግ የፍጥነት መለኪያ መረጃን እና የጄነሬተሩን የሙቀት መጠን በመደበኛነት በሚሰራበት ጊዜ ለመሰብሰብ የተወሰነ ጊዜ ይፈልጋል። ውሂቡ የActiveThreshold እና InActiveThreshold ቅንጅቶችን ዋቢ ነው፣ ጄኔሬተሩ ባልተለመደ ሁኔታ እየሰራ መሆኑን ለማረጋገጥም ነው።
የተሰበሰበው የZ-Axis Accelerometer ዳታ በ100ሜ/ሴኮንድ የተረጋጋ እንደሆነ ከወሰድን ስህተቱ ±2m/s²፣ ActiveThreshold ወደ 110m/s²፣ እና InActiveThreshold 104m/s² ነው።
መጫን
- የገመድ አልባ የፍጥነት መለኪያ እና የገጽታ ሙቀት ዳሳሽ (R718E) አብሮ የተሰራ ማግኔት አለው ሲጭን ምቹ እና ፈጣን የሆነ ነገር ካለው ብረት ጋር ማያያዝ ይቻላል። መጫኑን የበለጠ ደህንነቱ የተጠበቀ ለማድረግ ክፍሉን ወደ ላይ ለመጠበቅ ብሎኖች (የተገዙ) ይጠቀሙ
ማስታወሻ፡-
የመሣሪያውን ሽቦ አልባ ስርጭት እንዳይነካ ለመከላከል መሣሪያውን በብረት በተሸፈነ ሳጥን ውስጥ ወይም በዙሪያው ካሉ ሌሎች የኤሌክትሪክ መሣሪያዎች ጋር አይጫኑ።

2. የመጫኛ ጥንቃቄዎች;
በሚጫኑበት ጊዜ ጄነሬተር ኃይል ጠፍቶ እና በማይንቀሳቀስ ሁኔታ ላይ እያለ R718E አግድም እንዲጭን ይመከራል። R718E ን ከጫኑ እና ካስተካከሉ በኋላ እባክዎን መሳሪያውን ያብሩት። መሣሪያው ከተቀላቀለ ከአንድ ደቂቃ በኋላ R718E የመሳሪያውን መለኪያ ያከናውናል (መሣሪያው ከተስተካከለ በኋላ ሊንቀሳቀስ አይችልም. መንቀሳቀስ ካለበት መሳሪያውን ለ 1 ደቂቃ ማጥፋት/ ማጥፋት አለበት, እና ከዚያም ማስተካከያው እንደገና ይከናወናል). R718E የሶስት ዘንግ የፍጥነት መለኪያ መረጃን እና የጄነሬተሩን የሙቀት መጠን በመደበኛነት በሚሰራበት ጊዜ ለመሰብሰብ የተወሰነ ጊዜ ይፈልጋል። ውሂቡ የActiveThreshold እና InActiveThreshold ቅንጅቶችን ዋቢ ነው፣ ጄኔሬተሩ ባልተለመደ ሁኔታ እየሰራ መሆኑን ለማረጋገጥም ነው።
3. R718E የሶስት ዘንግ አክስሌሮሜትር ከActiveThreshold በላይ ያለውን መረጃ ሲያገኝ፣ R718E የተገኘውን መረጃ ሪፖርት ያደርጋል። የሶስት ዘንግ የፍጥነት መለኪያ መረጃን ከላኩ በኋላ የሶስት ዘንግ የፍጥነት መለኪያ መሳሪያው መረጃ ከ InActiveThreshold ያነሰ መሆን አለበት እና የቆይታ ጊዜ ከ 5 ሰከንድ በላይ መሆን አለበት (ሊቀየር አይችልም) ከሚቀጥለው ምርመራ በፊት.
ማስታወሻ፡
- የመሳሪያው የሶስት ዘንግ የፍጥነት መለኪያ መረጃ ከ InActiveThreshold ያነሰ እና የሚቆይበት ጊዜ ከ 5 ሰከንድ ያነሰ መሆን ሲኖርበት, በዚህ ጊዜ, ንዝረቱ ከቀጠለ (የሶስት ዘንግ የፍጥነት መለኪያ መረጃ ከ InActiveThreshold ከፍ ያለ ነው) ለ 5 ሰከንዶች ያህል ይዘገያል. የሶስት ዘንግ የፍጥነት መለኪያ መረጃ ከInActiveThreshold በታች እስኪሆን እና የሚቆይበት ጊዜ ከ 5 ሰከንድ በላይ እስኪሆን ድረስ።
- R718E ሁለት ፓኬቶችን ይልካል ፣ አንደኛው የሶስት ዘንግ የፍጥነት መለኪያ መረጃ ነው ፣ እና ሌላኛው ከ 10 ሰከንድ በኋላ የሶስት ዘንግ ፍጥነት እና የሙቀት መጠን መረጃ ይላካል።
ማስታወሻ፡-
እባክዎን ባትሪዎቹን ለመተካት አስፈላጊ ካልሆነ በስተቀር መሳሪያውን አይበታተኑ.
ባትሪዎችን በሚቀይሩበት ጊዜ የውሃ መከላከያ ጋኬትን ፣ የ LED አመልካች መብራትን ፣ የተግባር ቁልፎችን አይንኩ ። እባኮትን ለማጥበቅ ተስማሚ ዊንዳይ ይጠቀሙ (በኤሌትሪክ ስክሪፕት የሚጠቀሙ ከሆነ ማዞሪያውን እንደ 4kgf ለማዘጋጀት ይመከራል) መሳሪያው የማይበገር መሆኑን ለማረጋገጥ።
ስለ ባትሪ ማለፊያ መረጃ
ብዙ የ Netvox መሳሪያዎች በ 3.6V ER14505 Li-SOCl2 (ሊቲየም-ቲዮኒል ክሎራይድ) ባትሪዎች ብዙ አድቫን ይሰጣሉ.tages ዝቅተኛ የራስ-ፈሳሽ መጠን እና ከፍተኛ የኢነርጂ እፍጋትን ጨምሮ።
ነገር ግን፣ እንደ Li-SOCl2 ያሉ ቀዳሚ የሊቲየም ባትሪዎች በማከማቻ ውስጥ ለረጅም ጊዜ ከቆዩ ወይም የማከማቻው ሙቀት በጣም ከፍተኛ ከሆነ በሊቲየም አኖድ እና በቲዮኒል ክሎራይድ መካከል እንደ ምላሽ የመተላለፊያ ንብርብር ይመሰርታሉ። ይህ የሊቲየም ክሎራይድ ንብርብር በሊቲየም እና በቲዮኒል ክሎራይድ መካከል ባለው ቀጣይነት ባለው ምላሽ ምክንያት የሚከሰተውን ፈጣን ራስን መፍሰስ ይከላከላል ፣ነገር ግን የባትሪው ማለፊያ ወደ ቮልት ሊያመራ ይችላል።tagባትሪዎቹ ወደ ስራ ሲገቡ ዘግይተዋል፣ እና መሳሪያዎቻችን በዚህ ሁኔታ በትክክል ላይሰሩ ይችላሉ።
በዚህ ምክንያት እባክዎን ባትሪዎችን ከታመኑ ሻጮች ማግኘትዎን ያረጋግጡ እና ባትሪዎቹ ባለፉት ሶስት ወራት ውስጥ መፈጠር አለባቸው።
የባትሪውን የመተላለፊያ ሁኔታ ካጋጠሙ ተጠቃሚዎች የባትሪውን ሃይስቴሽን ለማጥፋት ባትሪውን ማግበር ይችላሉ.
ባትሪ ማግበርን የሚፈልግ መሆኑን ለመወሰን
አዲስ ER14505 ባትሪ ከ68ohm resistor ጋር በትይዩ ያገናኙ እና ቮልቱን ያረጋግጡtagየወረዳው ሠ.
ጥራዝ ከሆነtage ከ 3.3 ቪ በታች ነው፣ ይህ ማለት ባትሪው ማግበር ያስፈልገዋል ማለት ነው።
ባትሪውን እንዴት ማንቃት እንደሚቻል
ሀ. ባትሪን ከ68ohm resistor ጋር በትይዩ ያገናኙ
ለ. ግንኙነቱን ለ 6-8 ደቂቃዎች ያቆዩት
ሐ. ጥራዝtagየወረዳው ሠ ≧3.3V መሆን አለበት።
አስፈላጊ የጥገና መመሪያ
የምርቱን ምርጥ ጥገና ለማግኘት ለሚከተሉት ነገሮች ትኩረት ይስጡ-
- መሣሪያው ደረቅ እንዲሆን ያድርጉ። ዝናብ ፣ እርጥበት ወይም ማንኛውም ፈሳሽ ማዕድናትን ሊይዝ ይችላል እናም የኤሌክትሮኒክ ወረዳዎችን ያበላሻል። መሣሪያው እርጥብ ከሆነ እባክዎን ሙሉ በሙሉ ያድርቁት።
- መሳሪያውን በአቧራማ ወይም በቆሸሸ አካባቢ ውስጥ አይጠቀሙ ወይም አያከማቹ. ሊነጣጠሉ የሚችሉ ክፍሎቹን እና ኤሌክትሮኒካዊ ክፍሎቹን ሊጎዳ ይችላል።
- መሳሪያውን ከመጠን በላይ በሆነ ሙቀት ውስጥ አያስቀምጡ. ከፍተኛ ሙቀት የኤሌክትሮኒክስ መሳሪያዎችን ህይወት ያሳጥራል, ባትሪዎችን ያጠፋል, እና አንዳንድ የፕላስቲክ ክፍሎችን ይቀይራል ወይም ይቀልጣል.
- መሳሪያውን በጣም ቀዝቃዛ በሆኑ ቦታዎች ላይ አያስቀምጡ. አለበለዚያ የሙቀት መጠኑ ወደ መደበኛው የሙቀት መጠን ሲጨምር, እርጥበት ወደ ውስጥ ይወጣል, ይህም ሰሌዳውን ያጠፋል.
- መሳሪያውን አይጣሉት, አይንኳኩ ወይም አይንቀጠቀጡ. የመሳሪያዎች ግምታዊ አያያዝ የውስጠኛው የወረዳ ቦርዶችን እና ስሱትን ሊያጠፋ ይችላል።
- መሳሪያውን በጠንካራ ኬሚካሎች፣ ሳሙናዎች ወይም ጠንካራ ሳሙናዎች አያጽዱ።
- መሳሪያውን ከቀለም ጋር አይጠቀሙ. ማጭበርበሮች መሳሪያውን ሊገድቡ እና ክዋኔውን ሊነኩ ይችላሉ።
- ባትሪውን ወደ እሳቱ አይጣሉት, አለበለዚያ ባትሪው የተበላሹ ባትሪዎች ሊፈነዱ ይችላሉ.
ከላይ ያሉት ሁሉም በእርስዎ መሳሪያ፣ ባትሪ እና መለዋወጫዎች ላይ ተፈጻሚ ይሆናሉ። ማንኛውም መሳሪያ በትክክል የማይሰራ ከሆነ እባክዎን ለመጠገን በአቅራቢያ ወደሚገኝ የተፈቀደ የአገልግሎት መስጫ ይውሰዱት።
ሰነዶች / መርጃዎች
 |
netvox R718E ገመድ አልባ የፍጥነት መለኪያ እና የገጽታ ሙቀት ዳሳሽ [pdf] የተጠቃሚ መመሪያ R718E፣ ገመድ አልባ የፍጥነት መለኪያ እና የገጽታ ሙቀት ዳሳሽ፣ R718E ገመድ አልባ የፍጥነት መለኪያ እና የገጽታ ሙቀት ዳሳሽ |



