คู่มือผู้ใช้โมดูลเครือข่าย I/O EBYTE ME31-AXAX4040

ลิขสิทธิ์ทั้งหมดในอินเทอร์เน็ตและการแก้ไขคู่มือนี้เป็นของบริษัท Chengdu Ebyte Electronic Technology Co.,Ltd.
สินค้าเกินview
การแนะนำสินค้า
ME31-AXAX4040 มาพร้อมกับเอาท์พุตรีเลย์แบบ A 4 ทางและการตรวจจับอินพุตการสัมผัสแห้ง 4 ทิศทาง รองรับโปรโตคอล Modbus TCP หรือโปรโตคอล Modbus RTU สำหรับการควบคุมการรับ และอุปกรณ์ยังสามารถใช้เป็นเกตเวย์ Modbus ง่ายๆ (แปลงคำสั่ง Modbus ที่ไม่ใช่ท้องถิ่นโดยอัตโนมัติโดยส่งที่อยู่ผ่านพอร์ตซีเรียล/พอร์ตเครือข่าย) ของโมดูลเครือข่าย I/O เครือข่าย

คุณสมบัติ
- รองรับโปรโตคอลมาตรฐาน Mod b us RTU และโปรโตคอล Mod b us TCP
- รองรับซอฟต์แวร์การกำหนดค่าต่างๆ/PLC/หน้าจอสัมผัส
- การควบคุมการรับ RS485 I/O;
- การรับและการควบคุม R J45 I/O รองรับการเข้าถึงโฮสต์ 4 ทาง
- อินพุตสวิตช์ 4 ทาง DI (โหนดแห้ง);
- เอาท์พุตสวิตช์ 4 ทาง DO (รีเลย์แบบ A);
- สวิตช์เอาท์พุต (DO) รองรับโหมดระดับ โหมดพัลส์ โหมดติดตาม โหมดติดตามย้อนกลับ โหมดพลิกทริกเกอร์
- รองรับการตั้งค่าที่อยู่ Modbus แบบกำหนดเอง
- รองรับการกำหนดค่าบอดเรททั่วไป 8 แบบ
- รองรับ DHCP และ IP แบบคงที่;
- รองรับฟังก์ชั่น DNS, การแก้ไขชื่อโดเมน;
- รองรับฟังก์ชั่นเกตเวย์ Modbus;
- รองรับการเชื่อมโยงอินพุตและเอาต์พุต
ไดอะแกรมโทโพโลยีแอปพลิเคชัน

เริ่มต้นอย่างรวดเร็ว
[หมายเหตุ] การทดลองนี้ต้องดำเนินการโดยใช้พารามิเตอร์โรงงานเริ่มต้นอุปกรณ์ที่จำเป็น
ตารางต่อไปนี้แสดงรายการวัสดุที่จำเป็นสำหรับการทดสอบนี้:

การเชื่อมต่ออุปกรณ์
การเชื่อมต่อ RS485

หมายเหตุ: เมื่อส่งสัญญาณความถี่สูงบัส 485 ความยาวคลื่นของสัญญาณจะสั้นกว่าสายส่ง และสัญญาณจะสร้างคลื่นสะท้อนที่ปลายสายส่ง ซึ่งจะรบกวนสัญญาณเดิม ดังนั้น จึงจำเป็นต้องเพิ่มตัวต้านทานที่ปลายสายส่งเพื่อให้สัญญาณไม่สะท้อนกลับหลังจากถึงปลายสายส่ง ความต้านทานของขั้วต่อควรเท่ากับค่าอิมพีแดนซ์ของสายเคเบิลสื่อสาร ค่าทั่วไปคือ 120 โอห์ม หน้าที่ของตัวต้านทานนี้คือจับคู่ค่าอิมพีแดนซ์ของบัสและปรับปรุงการป้องกันการรบกวนและความน่าเชื่อถือของการสื่อสารข้อมูล
การเชื่อมต่ออินพุตดิจิตอล DI

การเชื่อมต่อเอาท์พุทรีเลย์

ใช้งานง่าย

การเดินสาย: คอมพิวเตอร์เชื่อมต่อกับอินเทอร์เฟซ RS485 ของ ME31 – AXAX4040 ผ่าน USB กับ RS485 โดย A เชื่อมต่อกับ A และ B เชื่อมต่อกับ B
เครือข่าย: เสียบสายเคเบิลเครือข่ายเข้าในพอร์ต R J45 และเชื่อมต่อกับพีซี
แหล่งจ่ายไฟ: ใช้แหล่งจ่ายไฟแบบสวิตชิ่ง DC – 1 2V (DC 8 ~ 28 V ) เพื่อจ่ายไฟให้ ME31 – AXAX4040
การกำหนดค่าพารามิเตอร์
ขั้นตอนที่ 1: แก้ไขที่อยู่ IP ของคอมพิวเตอร์ให้สอดคล้องกับอุปกรณ์ ในที่นี้ ฉันกำลังแก้ไขเป็น 1 92.168.3.100 เพื่อให้แน่ใจว่าอยู่ในเซกเมนต์เครือข่ายเดียวกันกับอุปกรณ์และ IP แตกต่างกัน หากคุณไม่สามารถเชื่อมต่อกับอุปกรณ์ได้หลังจากทำตามขั้นตอนข้างต้น โปรดปิดไฟร์วอลล์แล้วลองอีกครั้ง
ขั้นตอนที่ 2: เปิดตัวช่วยเครือข่าย เลือกไคลเอนต์ TCP ป้อน IP โฮสต์ระยะไกล 1 92.168.3.7 (พารามิเตอร์เริ่มต้น) ป้อนหมายเลขพอร์ต 5 02 (พารามิเตอร์เริ่มต้น) และเลือก HEX ที่จะส่ง
การทดสอบการควบคุม
การควบคุม Modbus TCP
เอาท์พุต DO แรกของ M E31- AXAX4040

ฟังก์ชั่นอื่นๆ สามารถทดสอบได้โดยใช้คำสั่งในตารางด้านล่างนี้
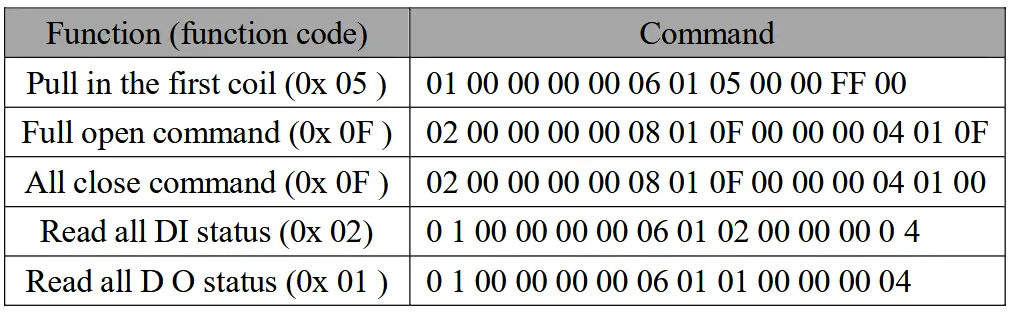
การควบคุม Modbus RTU
เอาท์พุต DO แรกของ M E3 1- AXAX4040

ฟังก์ชั่นอื่นๆ สามารถทดสอบได้โดยใช้คำสั่งในตารางด้านล่างนี้

ตัวบ่งชี้ทางเทคนิค
ข้อมูลจำเพาะและพารามิเตอร์

พารามิเตอร์เริ่มต้นของอุปกรณ์

มิติ

พอร์ตและตัวชี้วัด



แนะนำฟังก์ชั่นผลิตภัณฑ์
อินพุต DI
สวิตช์อินพุตการรับ DI
อินพุตสวิตช์ DI วัดสัญญาณระดับหรือสัญญาณพัลส์ขอบ (ขอบขึ้น ขอบลง) รองรับการรวบรวมโหนดแห้ง รองรับฟังก์ชันการนับ DI ค่าการนับสูงสุดคือ 65535 (การนับเกิน 65535 จะถูกล้างโดยอัตโนมัติ)
สวิตช์อินพุต DI รองรับโหมดทริกเกอร์สามโหมด: ขอบขาขึ้น ขอบขาลง และระดับ (ทริกเกอร์ขอบขาขึ้นเริ่มต้น)
วิธีการเคลียร์รองรับการเคลียร์อัตโนมัติและการเคลียร์ด้วยตนเอง (การเคลียร์อัตโนมัติตามค่าเริ่มต้น)
ตัวกรองสัญญาณเข้า
เมื่อสวิตช์อินพุต DI เพื่อรวบรวมสัญญาณ จะต้องคงค่าไว้หลายวินาทีampระยะเวลาหนึ่งก่อนที่จะยืนยัน พารามิเตอร์ตัวกรองสามารถตั้งค่าได้ในช่วง 1 ถึง 16 (6 วินาที)ampระยะเวลาลิงตามค่าเริ่มต้นคือ 6 *1 kHz )
สามารถกำหนดค่ากับคอมพิวเตอร์โฮสต์ได้ตามคำแนะนำ
ทำเอาต์พุต
โหมดเอาท์พุตของรีเลย์สามารถเอาท์พุตเอาต์พุตโหมดต่างๆ ได้ตามโหมดที่ผู้ใช้ตั้งค่าไว้ และเอาต์พุตระดับจะเปิดใช้งานตามค่าเริ่มต้น
จำนวนอินพุต
รองรับการนับอินพุต DI ผู้ใช้สามารถกำหนดค่าการรับขอบที่เพิ่มขึ้น การรับขอบที่ลดลง และการรับระดับตามความต้องการของตนเองได้ นอกจากนี้ คุณยังสามารถเปลี่ยนวิธีการหักบัญชีตามความต้องการได้อีกด้วย
วิธีทริกเกอร์:
ขอบที่เพิ่มขึ้น: เมื่อรวบรวมขอบที่เพิ่มขึ้น (ไม่นับเมื่อเปิดเครื่อง จะนับเมื่อปิดเครื่อง) จะถูกนับครั้งเดียว
ขอบตก: เมื่อมีการรวบรวมขอบที่หล่นลงมา (นับเมื่อเปิดเครื่อง และไม่นับเมื่อปล่อยออกมา) ให้นับหนึ่งครั้ง
ระดับ: มีการรวบรวมสองขอบและนับหนึ่งครั้งตามลำดับ
วิธีการหักล้าง:
อัตโนมัติ: อุปกรณ์จะล้างค่ารีจิสเตอร์จำนวน DI (0x 09DF ~ 0x 09E6) โดยอัตโนมัติทุกครั้งที่อ่าน
คู่มือ: โหมดคู่มือจำเป็นต้องเขียน 1 ลงในรีจิสเตอร์สัญญาณที่ชัดเจน (0x 0AA7 ~ 0x 0AAE) และรีจิสเตอร์โฮลดิ้งแต่ละตัวจะควบคุมสัญญาณที่ชัดเจนหนึ่งสัญญาณตามลำดับ
ระดับเอาท์พุต
เอาต์พุตตามระดับที่ผู้ใช้กำหนด ลักษณะสวิตช์ของโหมดระดับจะคล้ายกับฟังก์ชันของสวิตช์ล็อคตัวเอง
เอาท์พุตพัลส์
หลังจากเปิดสวิตช์เอาต์พุต DO แล้ว สวิตช์เอาต์พุต DO จะปิดโดยอัตโนมัติหลังจากรักษาเวลาความกว้างของพัลส์ที่ตั้งไว้ (เป็นมิลลิวินาที) ช่วงการตั้งค่าความกว้างของพัลส์คือ 50~65535 มิลลิวินาที (ค่าเริ่มต้นคือ 50 มิลลิวินาที)
โหมดติดตาม
ตามแหล่งที่มาต่อไปนี้ที่กำหนดค่าโดยผู้ใช้ (เมื่ออุปกรณ์มีฟังก์ชั่นการรับ AI หรือการตรวจจับ DI สามารถใช้ DI หรือ AI เป็นแหล่งต่อไปนี้ได้ มิฉะนั้น ฟังก์ชั่นนี้จะไร้ประโยชน์) เพื่อเปลี่ยนสถานะรีเลย์ เอาต์พุตหลายตัวสามารถติดตามเอาต์พุตแหล่งที่มาเดียวกัน กล่าวคือ DI ตรวจจับอินพุต และส่งออกรีเลย์โดยอัตโนมัติที่รับอินพุตเป็นแหล่งต่อไปนี้ (เช่นample: DI คือ 1, DO คือปิด) เมื่อเปิดโหมดติดตาม ควรกำหนดค่าแหล่งติดตามในเวลาเดียวกัน มิฉะนั้นจะติดตามอินพุตแรกตามค่าเริ่มต้น
โหมดติดตามย้อนกลับ
ตามแหล่งที่มาต่อไปนี้ที่กำหนดค่าโดยผู้ใช้ (เมื่ออุปกรณ์มีฟังก์ชั่นการรับ AI หรือการตรวจจับ DI สามารถใช้ DI หรือ AI เป็นแหล่งต่อไปนี้ได้ มิฉะนั้น ฟังก์ชั่นนี้จะไร้ประโยชน์) เพื่อเปลี่ยนสถานะรีเลย์ เอาต์พุตหลายตัวสามารถติดตามเอาต์พุตแหล่งที่มาเดียวกัน กล่าวคือ DI ตรวจจับอินพุต และส่งออกรีเลย์โดยอัตโนมัติเป็นแหล่งต่อไปนี้ (เช่นample: DI คือ 1, DO ถูกตัดการเชื่อมต่อ) เมื่อเปิดโหมดติดตาม ควรกำหนดค่าแหล่งติดตามในเวลาเดียวกัน มิฉะนั้น จะติดตามอินพุตแรกตามค่าเริ่มต้น
โหมดการพลิกทริกเกอร์
ตามแหล่งที่มาต่อไปนี้ที่กำหนดค่าโดยผู้ใช้ (เมื่ออุปกรณ์มีฟังก์ชันการรับ AI หรือการตรวจจับ DI สามารถใช้ DI หรือ AI เป็นแหล่งต่อไปนี้ได้ มิฉะนั้น ฟังก์ชันนี้จะไร้ประโยชน์) เพื่อเปลี่ยนสถานะรีเลย์ เอาต์พุตหลายตัวสามารถติดตามเอาต์พุตแหล่งที่มาเดียวกันได้ กล่าวอย่างง่ายๆ เมื่อ DI สร้างสัญญาณทริกเกอร์ (ขอบขึ้นหรือขอบลง) DO จะมีการเปลี่ยนแปลงสถานะ เมื่อเปิดโหมดพลิกทริกเกอร์ ควรกำหนดค่าแหล่งที่มาต่อไปนี้ในเวลาเดียวกัน มิฉะนั้น จะติดตามอินพุตแรกตามค่าเริ่มต้น
สถานะเปิดเครื่อง
ตามสถานะที่ผู้ใช้กำหนด หลังจากเปิดอุปกรณ์แล้ว รีเลย์เอาท์พุตจะเปิดตามสถานะที่ผู้ใช้กำหนด และจะปิดตามค่าเริ่มต้น
เกตเวย์ Modbus
อุปกรณ์สามารถส่งคำสั่ง Modbus ที่ไม่ใช่แบบดั้งเดิมจากเครือข่าย/พอร์ตซีเรียลไปยังพอร์ตซีเรียล/เครือข่ายได้อย่างโปร่งใส และคำสั่ง Modbus ในเครื่องจะถูกดำเนินการโดยตรง
การแปลงโปรโตคอล Modbus TCP/RTU
หลังจากเปิดแล้ว ข้อมูล Modbus TCP บนฝั่งเครือข่ายจะถูกแปลงเป็นข้อมูล Modbus RTU
การกรองที่อยู่บัส Mod
ฟังก์ชั่นนี้สามารถใช้เป็นโฮสต์เพื่อเข้าถึงพอร์ตซีเรียลของอุปกรณ์ในซอฟต์แวร์โฮสต์หรือหน้าจอการกำหนดค่าบางตัว และใช้ฟังก์ชั่นเกตเวย์ของอุปกรณ์ สเลฟอยู่ที่ปลายเครือข่าย และ Modbus เปิดอยู่ ใช้เมื่อฟังก์ชั่นของ TCP ถูกแปลงเป็น RTU มีสเลฟหลายตัวบนบัสซึ่งอาจทำให้ข้อมูลสับสน ในขณะนี้ การเปิดใช้งานการกรองที่อยู่สามารถทำให้แน่ใจได้ว่าเฉพาะที่อยู่ที่ระบุเท่านั้นที่จะผ่านอุปกรณ์ได้ เมื่อพารามิเตอร์เป็น 0 ข้อมูลจะถูกส่งแบบโปร่งใส และพารามิเตอร์เป็น 1-255 เฉพาะข้อมูลจากที่อยู่สเลฟที่ตั้งไว้เท่านั้นที่จะถูกส่ง
คำอธิบายเฟรมข้อมูลโปรโตคอล TCP ของ Mod bus
รูปแบบเฟรม TCP:

- Transaction ID: ถือเป็นหมายเลขซีเรียลของข้อความ โดยทั่วไปจะเติม 1 หลังการสื่อสารแต่ละครั้งเพื่อแยกข้อความข้อมูลการสื่อสารที่แตกต่างกัน
- ตัวระบุโปรโตคอล: 00 00 หมายถึงโปรโตคอล Modbus TCP
- ความยาว: ระบุความยาวของข้อมูลถัดไปเป็นไบต์
Example: รับสถานะ DI

คำอธิบายเฟรมข้อมูลโปรโตคอล Mod bus RTU
รูปแบบเฟรม RTU:

Example: รับคำสั่งสถานะ DI
ฟังก์ชั่นการเชื่อมโยง IO
ฟังก์ชันการเชื่อมโยงแบ่งออกเป็นการเชื่อมโยง I-DO และการเชื่อมโยง DI-DO
โดยทั่วไปแล้วฟังก์ชันการเชื่อมโยงจะต้องแบ่งออกเป็นสองส่วน
ส่วนแรกคือแหล่งทริกเกอร์: อินพุต AI/DI ทั้งสอง ส่วนที่สองคือทริกเกอร์: เอาท์พุต DO/AO ทั้งสอง
- เมื่อใช้ DI เป็นแหล่งทริกเกอร์ สถานะอินพุตของ DI และการเปลี่ยนแปลงของ DI สามารถใช้เป็นสัญญาณได้ตามการกำหนดค่า DO ที่สอดคล้องกัน
ก. ในโหมดติดตาม/ติดตามแบบย้อนกลับ สถานะปัจจุบันของ DI จะถูกใช้เป็นสัญญาณ และสถานะของ DO จะเหมือนกัน/ตรงข้ามกับสถานะของ DI
b. โหมดการกลับทิศทางของทริกเกอร์ การเปลี่ยนสถานะ DI ถูกใช้เป็นสัญญาณ หากสัญญาณทริกเกอร์ถูกตั้งค่าให้เปลี่ยนที่ขอบขาขึ้นของ DI สถานะปัจจุบันของ DO จะเปลี่ยนแปลงทันที - เมื่อใช้ AI เป็นแหล่งทริกเกอร์ สัญญาณ AI จะถูกประมวลผลเป็นสัญญาณที่คล้ายกับ DI ผ่านกระบวนการที่คล้ายกับทริกเกอร์ชิมิตต์ จากนั้นสัญญาณนี้จะเชื่อมโยงกับ DO กระบวนการเชื่อมโยงสามารถอ้างถึงการเชื่อมโยง DI/DO ได้
ข้อมูลโมดูลที่กำหนดเอง
ที่อยู่บัส Mod
ที่อยู่อุปกรณ์คือ 1 โดยค่าเริ่มต้น และสามารถปรับเปลี่ยนที่อยู่ได้ และช่วงที่อยู่คือ 1-247
ชื่อโมดูล
ผู้ใช้สามารถกำหนดชื่ออุปกรณ์ได้ตามความต้องการของตนเองเพื่อแยกแยะ รองรับภาษาอังกฤษ รูปแบบดิจิทัล สูงสุด 20 ไบต์
พารามิเตอร์เครือข่าย
เว้นแต่จะระบุไว้เป็นอย่างอื่น: พารามิเตอร์ที่เกี่ยวข้องกับเครือข่ายต่อไปนี้จะมีค่าเริ่มต้นเป็นพารามิเตอร์ที่เกี่ยวข้องกับ IPV4
- MAC ของอุปกรณ์: ผู้ใช้สามารถรับได้โดยการอ่านรีจิสเตอร์ที่ระบุ และไม่สามารถเขียนพารามิเตอร์นี้ได้
- ที่อยู่ IP: ที่อยู่ IP ของอุปกรณ์ อ่านและเขียนได้
- พอร์ต Mod bus TCP: หมายเลขพอร์ตของอุปกรณ์ อ่านและเขียนได้
- Subnet mask: หน้ากากที่อยู่ สามารถอ่านและเขียนได้
- ที่อยู่เกตเวย์: เกตเวย์.
- DHCP : ตั้งค่าวิธีที่อุปกรณ์รับ IP : แบบคงที่ (0), แบบไดนามิก (1)
- IP เป้าหมาย: เมื่ออุปกรณ์ทำงานในโหมดไคลเอนต์ IP เป้าหมายหรือชื่อโดเมนของการเชื่อมต่ออุปกรณ์
- พอร์ตปลายทาง: เมื่ออุปกรณ์ทำงานในโหมดไคลเอนต์ พอร์ตปลายทางของการเชื่อมต่ออุปกรณ์
- เซิร์ฟเวอร์ DNS: อุปกรณ์อยู่ในโหมดไคลเอนต์และแก้ไขชื่อโดเมนของเซิร์ฟเวอร์
- โหมดการทำงานของโมดูล: สลับโหมดการทำงานของโมดูล เซิร์ฟเวอร์: อุปกรณ์เทียบเท่ากับเซิร์ฟเวอร์ รอให้ไคลเอนต์ของผู้ใช้เชื่อมต่อ และจำนวนการเชื่อมต่อสูงสุดคือ 4 ไคลเอนต์: อุปกรณ์เชื่อมต่อกับ IP เป้าหมายและพอร์ตที่ตั้งค่าโดยผู้ใช้
- การอัปโหลดแบบใช้งานอยู่: เมื่อพารามิเตอร์นี้ไม่ใช่ 0 และอุปกรณ์อยู่ในโหมดไคลเอนต์ สถานะอินพุตแบบแยกส่วนของอุปกรณ์จะถูกอัพโหลดไปยังเซิร์ฟเวอร์เมื่อเชื่อมต่อเป็นครั้งแรกหรือเมื่ออินพุตมีการเปลี่ยนแปลง และอินพุตแอนะล็อกจะถูกอัพโหลดตามช่วงเวลาที่กำหนดค่าไว้
พารามิเตอร์แบบอนุกรม
พารามิเตอร์สำหรับการตั้งค่าการสื่อสารแบบอนุกรม:
พารามิเตอร์เริ่มต้น:
บอดเรท: 9600 (03);
บิตข้อมูล: 8บิต;
สต็อปบิต: 1บิต;
หลักพาริตี้: N ONE (00);
- อัตราการส่งข้อมูล:

- ตรวจสอบหลัก:

การกำหนดค่าพารามิเตอร์ MODBUS
หมายเหตุ: ตามความต้องการใช้งานซอฟต์แวร์บางตัว (เช่น KingView) ต้องเพิ่ม +1 เมื่อแปลงจากเลขฐานสิบหกไปเป็นเลขฐานสิบเพื่อดำเนินการกับรีจิสเตอร์ (ค่าทศนิยมทั้งหมดในตารางได้รับการปรับด้วย +1 เรียบร้อยแล้ว)
รายการทะเบียน DI

ลงทะเบียนรายการ





การดำเนินการคำสั่งบัส Mod เช่นample
1. อ่านสถานะคอยล์ (DO)
ใช้โค้ดฟังก์ชันอ่านสถานะคอยล์ (01) เพื่ออ่านสถานะคอยล์เอาท์พุต เช่นampเลอ:
หลังจากส่งคำสั่งข้างต้นไปยังอุปกรณ์ผ่านบัส 485 แล้ว อุปกรณ์จะส่งคืนค่าต่อไปนี้:
ข้อมูลสถานะที่ส่งคืนด้านบน 0 1 บ่งชี้ว่าเอาท์พุต DO 1 เปิดอยู่
2. สถานะคอยล์ควบคุม (DO)
รองรับการทำงานของรหัสฟังก์ชั่นการทำงานของคอยล์เดี่ยว (0 5 ), การทำงานของคอยล์หลายตัว ( 0F )
ใช้คำสั่ง 0 5 เขียนคำสั่งเดียว เช่นampเลอ :
ใช้คำสั่ง 0 5 เขียนคำสั่งเดียว เช่นampเลอ :
หลังจากส่งคำสั่งข้างต้นไปยังอุปกรณ์ผ่านบัส 485 แล้ว อุปกรณ์จะส่งคืนค่าต่อไปนี้:
คอยล์ DO1 เปิดอยู่
ใช้โค้ดฟังก์ชั่น 0 F เป็นคำสั่งในการเขียนคอยล์หลายตัว เช่นampเลอ:
หลังจากส่งคำสั่งข้างต้นไปยังอุปกรณ์ผ่านบัส 485 แล้ว อุปกรณ์จะส่งคืนค่าต่อไปนี้:
คอยล์อยู่ครบเลย
3. อ่านทะเบียนผู้ถือครอง
ใช้โค้ดฟังก์ชัน 03 เพื่ออ่านค่ารีจิสเตอร์ตั้งแต่หนึ่งค่าขึ้นไป เช่นampเลอ:
ใช้โค้ดฟังก์ชัน 03 เพื่ออ่านค่ารีจิสเตอร์ตั้งแต่หนึ่งค่าขึ้นไป เช่นampเลอ:
หลังจากส่งคำสั่งข้างต้นไปยังอุปกรณ์ผ่านบัส 485 แล้ว อุปกรณ์จะส่งคืนค่าต่อไปนี้:
00 00 ข้างต้นหมายความว่า DO1 อยู่ในโหมดเอาต์พุตระดับ
4. ทะเบียนการถือครองกิจการ
รองรับการทำงานของรีจิสเตอร์ตัวเดียว (0 6 ), การทำงานของรีจิสเตอร์หลายตัว ( 10 ) ฟังก์ชั่นการทำงานของรหัส
ใช้โค้ดฟังก์ชั่น 06 เขียนรีจิสเตอร์โฮลดิ้งตัวเดียว เช่นample: ตั้งค่าโหมดการทำงานของ DO1 ให้เป็นโหมดพัลส์
หลังจากส่งคำสั่งข้างต้นไปยังอุปกรณ์ผ่านบัส 485 แล้ว อุปกรณ์จะส่งคืนค่าต่อไปนี้:
หากการแก้ไขสำเร็จ ข้อมูลของรีจิสเตอร์ 0x0578 จะเป็น 0x0001 และโหมดเอาต์พุตพัลส์จะเปิดขึ้น
ใช้โค้ดฟังก์ชั่น 10 เพื่อเขียนคำสั่งของรีจิสเตอร์โฮลดิ้งหลายตัว เช่นample: ตั้งค่าโหมดการทำงานของ DO1 และ DO2 ในเวลาเดียวกัน
หลังจากส่งคำสั่งข้างต้นไปยังอุปกรณ์ผ่านบัส 485 แล้ว อุปกรณ์จะส่งคืนค่าต่อไปนี้:
หากการปรับเปลี่ยนสำเร็จ ค่าของรีจิสเตอร์สองตัวที่อยู่ติดกันซึ่งเริ่มต้นที่ 0x0578 คือ 0x0001 และ 0x000 ตามลำดับ 1 จะทำเครื่องหมาย DO1 และ DO2 เพื่อเปิดใช้งานเอาต์พุตพัลส์
ซอฟต์แวร์การกำหนดค่า
การได้มาและการควบคุม
ขั้นตอนที่ 1: เชื่อมต่อคอมพิวเตอร์กับอุปกรณ์
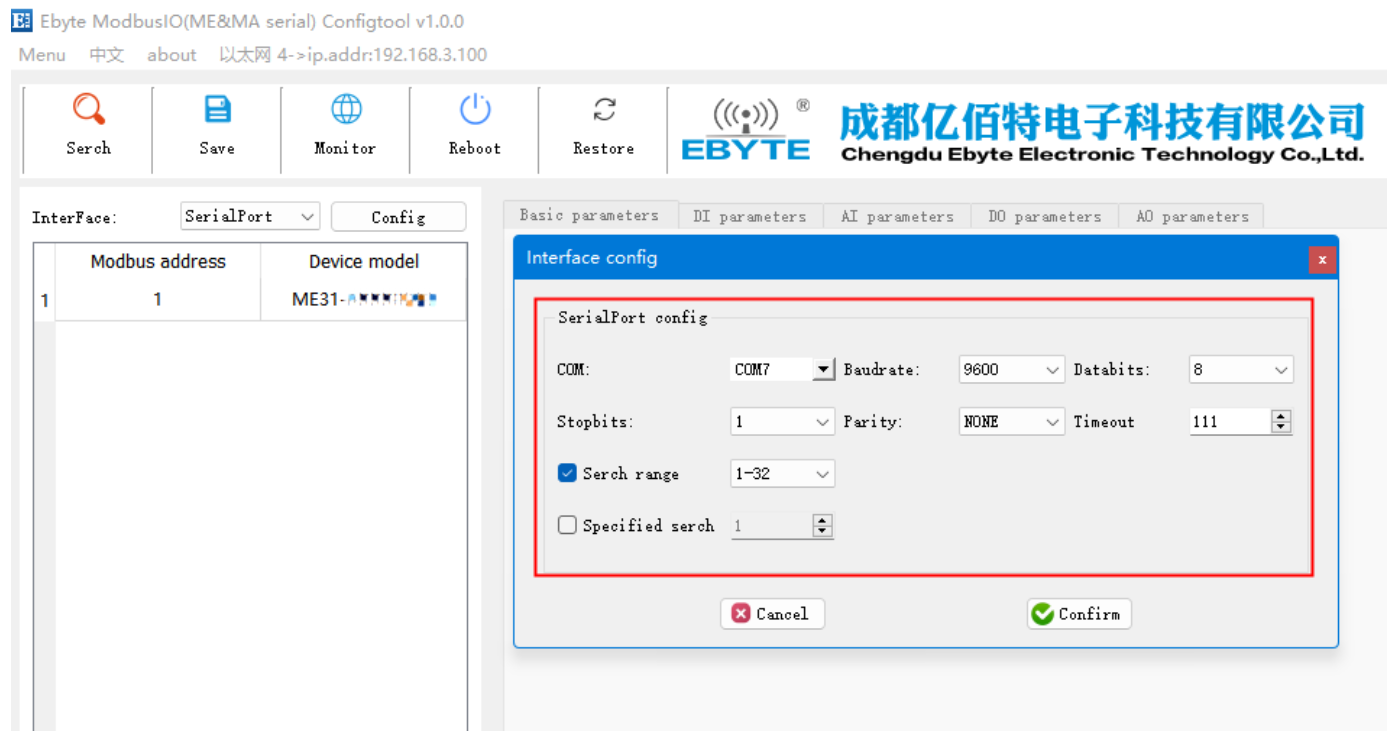
- คุณสามารถกำหนดค่าอุปกรณ์ได้โดยเลือกอินเทอร์เฟซ (พอร์ตอนุกรม/พอร์ตเครือข่าย) หากคุณเลือกพอร์ตเครือข่าย คุณต้องเลือกการ์ดเครือข่ายก่อนแล้วจึงค้นหาอุปกรณ์

- หากคุณเลือกพอร์ตซีเรียล คุณต้องเลือกหมายเลขพอร์ตซีเรียลที่สอดคล้อง และอัตราบอดเรท บิตข้อมูล บิตสต็อป บิตพาริตี้ และช่วงการค้นหาเซกเมนต์ที่อยู่เดียวกันกับอุปกรณ์ จากนั้นจึงค้นหา
ขั้นตอนที่ 2: เลือกอุปกรณ์ที่สอดคล้อง

ขั้นตอนที่ 3: คลิกอุปกรณ์ออนไลน์เพื่อเข้าสู่การตรวจสอบ IO ต่อไปนี้คือการแสดงผลหน้าจอการตรวจสอบ IO
การตั้งค่าพารามิเตอร์
ขั้นตอนที่ 1: สำหรับการเชื่อมต่ออุปกรณ์ โปรดดูที่ “การรับและการควบคุม”
ขั้นตอนที่ 2: ผู้ใช้สามารถกำหนดค่าพารามิเตอร์อุปกรณ์ พารามิเตอร์เครือข่าย พารามิเตอร์ DI พารามิเตอร์ AI พารามิเตอร์ DO และพารามิเตอร์ AO (เช่นample: หากอุปกรณ์ไม่มีฟังก์ชัน AO จะไม่สามารถกำหนดค่าพารามิเตอร์ AO ได้)


ขั้นตอนที่ 3: หลังจากกำหนดค่าพารามิเตอร์แล้ว ให้คลิกดาวน์โหลดพารามิเตอร์ และคุณจะเห็นข้อความแจ้งเตือนในผลลัพธ์บันทึกว่าบันทึกพารามิเตอร์เรียบร้อยแล้ว ให้คลิกรีสตาร์ทอุปกรณ์ และพารามิเตอร์ที่แก้ไขจะมีผลหลังจากที่อุปกรณ์รีสตาร์ท


สิทธิ์ในการตีความขั้นสุดท้ายเป็นของ Chengdu Ebyte Electronic Technology Co., Ltd.
ประวัติการแก้ไข

เกี่ยวกับเรา
การสนับสนุนด้านเทคนิค: support@cdebyte.com
ลิงค์ดาวน์โหลดเอกสารและการตั้งค่า RF: https://www.es-ebyte.com
ขอขอบคุณที่ใช้ผลิตภัณฑ์ Ebyte! โปรดติดต่อเราหากมีคำถามหรือข้อเสนอแนะ: info@cdebyte.com
-
โทรศัพท์: +86 028-61399028
Web: https://www.es-ebyte.com
ที่อยู่: B5 Mold Park, 199# Xiqu Ave, High-tech District, Sichuan, China
![]()
ลิขสิทธิ์ © 2012–2024 บริษัท เฉิงตู Ebyte Electronic Technology Co., Ltd.
เอกสาร / แหล่งข้อมูล
 | โมดูลเครือข่าย I/O EBYTE ME31-AXAX4040 [พีดีเอฟ] คู่มือการใช้งาน โมดูลเครือข่าย IO ME31-AXAX4040, ME31-AXAX4040, โมดูลเครือข่าย IO, โมดูลเครือข่าย |