HAPPYMODEL Crux3
מדריך הוראות לרחפן HAPPYMODEL Crux3 FPV
דגם: Crux3
1. הקדמה
ברוכים הבאים למדריך ההוראות עבור רחפן ה-HAPPYMODEL Crux3 FPV שלכם. מדריך זה מספק מידע חיוני להפעלה, התקנה, תחזוקה ופתרון בעיות בטוחים ויעילים של הרחפן שלכם. אנא קראו מדריך זה בעיון לפני הפעלת הרחפן Crux3 שלכם כדי להבטיח ביצועים ואריכות ימים אופטימליים.
2. המוצר נגמרview
תכונות מפתח
- רחפן קיסם ללא מברשות 1-2s קל במיוחד במשקל 41 גרם.
- מצויד בבקר הטיסה החדש CrazybeeX 4in1 AIO.
- כולל מצלמת CADDX ANT להזנת FPV ברורה.
- מופעל על ידי מנועים חדשים ללא מברשות 1202.5 6400KV.
- משתמש במחבר XT30 לכניסת סוללה.
- תואם למצלמת Insta360 Go לצפייה קולנועיתtage.
- אפשרויות מקלט מרובות זמינות: Frsky SPI פנימי (D8/D16), Flysky SPI פנימי (AFHDS/AFHDS-2A), DSM2/X SPI פנימי, Frsky RXSR חיצוני, ו-TBS Crossfire Nano חיצוני.
מידות ומשקל
מידות הרחפן Crux3 הן כ-97 מ"מ x 97 מ"מ x 35 מ"מ (ללא מדחפים) ומשקלו 41 גרם (ללא סוללה), מה שהופך אותו לנייד וזריז במיוחד.

איור 2.1: חזית view של רחפן ה-HAPPYMODEL Crux3 FPV, מוצגasinהעיצוב הקומפקטי שלו וסידור המדחף.

איור 2.2: צד view של רחפן Crux3, תוך הדגשת ערימת בקרי הטיסה ומיקום המצלמה.
3. רכיבים כלולים
חבילת HAPPYMODEL Crux3 שלך כוללת בדרך כלל את הרכיבים הבאים:
- רחפן HAPPYMODEL Crux3 FPV (עם גרסת מקלט נבחרת)
- מדחפים (בדרך כלל כלולים סט רזרבי)
- סוללה (ייתכן שתמכר בנפרד או שתהיה כלולה בהתאם לאריזה)
- מצלמה (CADDX ANT מותקנת מראש)
- אביזרים קטנים (למשל, אזיקוני רוכסן, מברג, רצועת סוללה)

איור 3.1: הרחפן Crux3 יחד עם האביזרים הרגילים שלו, ארוזים בקפידה בתיק נשיאה.
4. התקנה
4.1 חיבור סוללה
רחפן Crux3 משתמש במחבר XT30 כקלט חשמל. מומלץ להשתמש בסוללות LiPo של 2 שניות מדגם 350mAh / 400mAh / 450mAh / 520mAh לקבלת ביצועי טיסה אופטימליים. יש לוודא שהסוללה טעונה במלואה לפני החיבור.
- יישר בזהירות את מחבר ה-XT30 מהסוללה עם מחבר ה-XT30 שעל הרחפן.
- לחץ בחוזקה עד שהמחברים יישארו במקומם לחלוטין.
- אבטחו את הסוללה למסגרת הרחפן באמצעות רצועת הסוללה המצורפת כדי למנוע תזוזה במהלך הטיסה.

איור 4.1: רחפן Crux3 עם סוללה המחוברת דרך מחבר XT30, מוכן לטיסה.
4.2 התקנת מדחף
ה-Crux3 משתמש במדחפים מדגם Gemfan 3018-2. יש לוודא שהמדחפים מותקנים כהלכה בהתאם לכיוון סיבוב המנוע.
- זהה את המדחף הנכון עבור כל מנוע (עם כיוון השעון ונגד כיוון השעון).
- דחף בעדינות את המדחף על ציר המנוע עד שהוא יישב בצורה שטוחה.
- ודא שהמדחף מחובר היטב אך אל תחזק אותו יתר על המידה אם אתה משתמש בברגים.

איור 4.2: תקריב view של מכלול המנוע והמדחף EX1202.5 6400KV ברחפן Crux3.
4.3 חיבור עם משדר
תהליך הקישור משתנה בהתאם לגרסת המקלט של הרחפן Crux3 שלך. עיין במדריך המשדר שלך לקבלת הוראות קישור ספציפיות.
- גרסת Frsky SPI פנימית: תואם למצבי ACCST D8 / D16. מומלץ להשתמש במצב D8.
- גרסת Flysky SPI פנימית: תואם למשדרי AFHDS ו-AFHDS-2A Flysky.
- גרסת DSM2/X SPI פנימית: תואם לרדיו Spektrum או לפרוטוקול רב DSM2/X.
- גרסת Frsky RXSR חיצונית: פלט sbus ACCST D16.
- גרסת TBS Crossfire Nano חיצונית: דורש משדר TBS Crossfire.
בדרך כלל, תצטרכו להעביר גם את המקלט של הרחפן וגם את המשדר למצב קשירה. עיינו בתיעוד הקושחה של בקר הטיסה (למשל, Betaflight) לקבלת נהלי הגדרת המקלט והקשירה המפורטים.
5. הוראות הפעלה
5.1 הכנת טיסה
- ודא שכל הרכיבים מחוברים היטב ושהמדחפים נקיים מנזק.
- ודא שהסוללה טעונה במלואה ומחוברת כראוי.
- הפעילו את משקפי ה-FPV שלכם וודאו שסרטון וידאו ברור ממצלמת CADDX ANT של הרחפן.
- הפעל את משדר הרדיו שלך וודא שהוא מחובר לרחפן.
- הנח את הרחפן על משטח ישר ויציב באזור פתוח, נקי ממכשולים.
5.2 בקרות טיסה בסיסיות
הכירו את הפקדים הבסיסיים במשדר שלכם:
- מצערת: שולט בגובה (בדרך כלל מוט הסטיק השמאלי, אנכי).
- לְסַבְּסֵב: מסובב את הרחפן שמאלה או ימינה (בדרך כלל מוט שמאלי, אופקי).
- פְּסִיעָה: מטה את הרחפן קדימה או אחורה (בדרך כלל מוט ימין, אנכי).
- גָלִיל: מטה את הרחפן שמאלה או ימינה (בדרך כלל מוט ימני, אופקי).
דרכו את המנועים באמצעות מתג הדריכה המיועד במשדר שלכם (ראו את תצורת Betaflight שלכם). לאחר הדריכה, הגבר באיטיות את המצערת להמראה.
5.3 תאימות מצלמת Insta360 Go
הרחפן Crux3 תוכנן להיות תואם למצלמת Insta360 Go. זה מאפשר צילום תמונות יציבות באיכות גבוהה.tagבמהלך הטיסות שלכם. ודאו ש-Insta360 Go מחובר היטב לנקודת ההרכבה הייעודית של הרחפן לפני הטיסה.
6. תחזוקה
6.1 טיפים לתחזוקה כללית
- בדיקת מדחף: בדקו באופן קבוע את המדחפים לאיתור סדקים, כיפופים או חריצים. החליפו מיד מדחפים פגומים מכיוון שהם עלולים לגרום לרעידות ולהשפיע על ביצועי הטיסה.
- בדיקת מסגרת: לאחר כל נחיתה קשה או התרסקות, יש לבדוק את שלדת סיבי הקרבון לאיתור סדקים או נזק.
- ניקוי מנוע: יש לשמור על מנועים נקיים מלכלוך, אבק ופסולת. יש לנקות אותם באמצעות אוויר דחוס במידת הצורך.
- בדיקת רכיבים: ודא שכל הברגים מהודקים היטב ושהחיבורים החשמליים (למשל, XT30, חוטי מנוע) מאובטחים.
- טיפול בסוללה: אחסן סוללות LiPo בנפח אחסוןtage (כ-3.8 וולט לתא) כאשר אינו בשימוש. אין לטעון יתר על המידה או לפרוק יתר על המידה.
7. פתרון תקלות
7.1 בעיות ופתרונות נפוצים
- רחפן לא מתניע: בדוק אם מתג הדריכה במשדר שלך מוגדר כהלכה ב-Betaflight. ודא שהרחפן מאוזן ואין תנאי טרום-דריכה (למשל, סוללה חלשה, אין אות מקלט) המונעים את הדריכה.
- אין הזנת וידאו: ודא שמצלמת CADDX ANT מחוברת כראוי לבקר הטיסה. בדוק את משקפי ה-FPV שלך לבחירת ערוץ נכונה ורמת סוללה נכונה.
- טיסה לא יציבה/ויברציות: בדוק את המדחפים לאיתור נזקים וודא שהם מחוברים היטב. בדוק אם יש מנועים או רכיבי שלדה רופפים. במידת הצורך, כייל מחדש את מד התאוצה ב- Betaflight.
- אובדן שליטה/בעיות טווח: ודא שהמקלט שלך מחובר כראוי למשדר. בדוק אם יש נזק לאנטנה הן ברחפן והן במשדר. הימנע מטיסה באזורים עם הפרעות גבוהות.
- מנועים לא מסתובבים: בדוק את חיבורי המנוע ל-ESC. ודא שהמנועים אינם חסומים. ודא את תפוקת המנוע בקונפיגורטור Betaflight.
לפתרון בעיות מתקדמות יותר או הגדרות, עיינו בתיעוד הרשמי של Betaflight ובפורומים הקהילתיים של בקר הטיסה CrazybeeX.
8. מפרטים
מצלמת CADDX ANT 8.1 1200TVL
| תכונה | מִפרָט |
|---|---|
| חיישן תמונה | חיישן CMOS 1/3 אינץ' |
| רזולוציה אופקית | 1200 TVL |
| מערכת טלוויזיה | NTSC או PAL |
| יחס גובה-רוחב תמונה | 16:9 או 4:3 |
| סִנכְּרוּן | פְּנִימִי |
| תריס אלקטרוני | PAL: 1/50-100,000; NTSC: 1/60-100,000 |
| יחס S/N | > 52dB (AGC OFF) |
| פלט וידאו | CVBS |
| עֲדָשָׁה | 1.8 מ"מ |
| מינימום תְאוּרָה | 0.001Lux@F1.2 |
| בקרת רווח אוטומטי (AGC) | כֵּן |
| BLC | כֵּן |
| WDR | WDR גלובלי |
| DNR | 3D DNR |
| מידות | 14*14 מ"מ (עם תושבת עד 19*19 מ"מ) |
| קלט כוח רחב | DC 3.7-18V |
| טמפרטורת עבודה | -20℃~+60℃ |
| מִשׁקָל | 2 גרם (NW) |

איור 8.1: מפרטים מפורטים עבור מצלמת ה-FPV המשולבת CADDX ANT 1200TVL.
8.2 מפרטי מקלט
| סוג מקלט | פרטים |
|---|---|
| גרסת מקלט SPI מובנה DSM2/X | תמיכה בהגנה מפני כשל, מקלט SPI BUS תואם DSM2/DSMX, מקסימום 12 ערוצים, ללא הפרעות קרקע (משדר ומקלט במרחק מטר אחד מהקרקע), טווח 200-300 מטר, הפעלת RSSI (מוצג על משקפי מגן). |
| גרסת מקלט Frsky R-XSR חיצונית | משקל: 1.5 גרם, מספר ערוצים: 16 ערוצים (1-16 ערוצים מערוץ SBUS, 1-8 ערוצים מערוץ CPPM), עוצמת פעולהtagטווח: 3.5V-10V, זרם פעולה: 70mA@5V, ניתן לשדרוג קושחה, תאימות: מודולים ושלטי רדיו מסדרת FrSky X במצב D16, יכול לתמוך בפרוטוקול ACCESS החדש של Frsky (שדרוג קושחה). |
| גרסת מקלט ננו חיצונית של TBS CRSF | מקלט TBS CROSSFIRE מקורי, פרוטוקול CRSF, תואם למשדר TBS רשמי. |

איור 8.2: מפרט עבור אפשרויות מקלט שונות הזמינות עם הרחפן Crux3.
8.3 מפרט בקר טיסה, מנוע ומדחף
| רְכִיב | מִפרָט |
|---|---|
| בקר טיסה (CrazybeeX 4in1 AIO) | מיקרו-בקר: STM32F411CEU6 (100MHz, 512K FLASH), חיישן: MPU-6000 (חיבור SPI), גודל לוח: 28.5 * 28.5 מ"מ, ספק כוח: כניסת סוללה 1-2S (DC 2.9V-8.7V), מקלט Blheli_S 4in1 ESC מובנה 5A (כל אחד) מוכן ל-Dshot600, OSD (בקרת SPI) מובנה של Betaflight, VTX 5.8G מובנה, מקלט SPI מובנה של Frsky/Flysky או ללא מקלט, BEC מובנה 5V 1A. יעדי קושחה: CrazybeeF4FR (Frsky SPI RX), CrazybeeF4FS (Flysky SPI RX), CrazybeeF4DXS (DSM2/X SPI RX), CrazybeeF4DX (מקלט חיצוני של Frsky RXSR/TBS CRSF Nano). |
| מנוע (EX1202.5 KV6400) | תצורה: 9N12P, קוטר סטטור: 12 מ"מ, אורך סטטור: 2.5 מ"מ, קוטר ציר: Φ1.5 מ"מ, מידות מנוע (קוטר*אורך): Φ14 מ"מ*14.5 מ"מ, משקל (גרם): 4.4 גרם, מספר תאים (ליפו): 1-2S. |
| מדחפים (Gemfan 3018-2) | עובי מרכז: 5.5 מ"מ, קוטר תומך: 76.5 מ"מ, קוטר חור מרכזי: 1.5 מ"מ. |
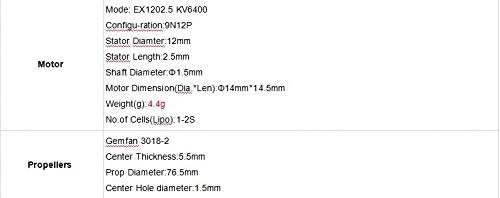
איור 8.3: מפרטים מפורטים עבור בקר הטיסה CrazybeeX, מנועי EX1202.5 ומדחפים Gemfan 3018-2.
9. אחריות ותמיכה
למידע על אחריות ותמיכה טכנית, אנא עיינו באתר הרשמי של HAPPYMODEL. webאתר או צור קשר עם הקמעונאי שלך. שמור את הוכחת הרכישה שלך עבור כל תביעת אחריות. משאבים מקוונים, כולל עדכוני קושחה ופורומים קהילתיים, יכולים גם לספק סיוע רב ערך למשתמשים מתקדמים.
Ask a question about this manual
Ask about setup, troubleshooting, compatibility, parts, safety, or missing instructions. Manuals+ will review the question and use this page’s manual context to help answer it.